

Chipow电机驱动芯片简介
描述
扫地机器人主要结构及Chipown推荐电机驱动芯片如下所示,覆盖所有电机。
下表是驱动芯片的主要规格介绍:

电机驱动芯片简介
1PN7708B -- 驱动能力强!温升及
温度特性优!抗干扰能力强!
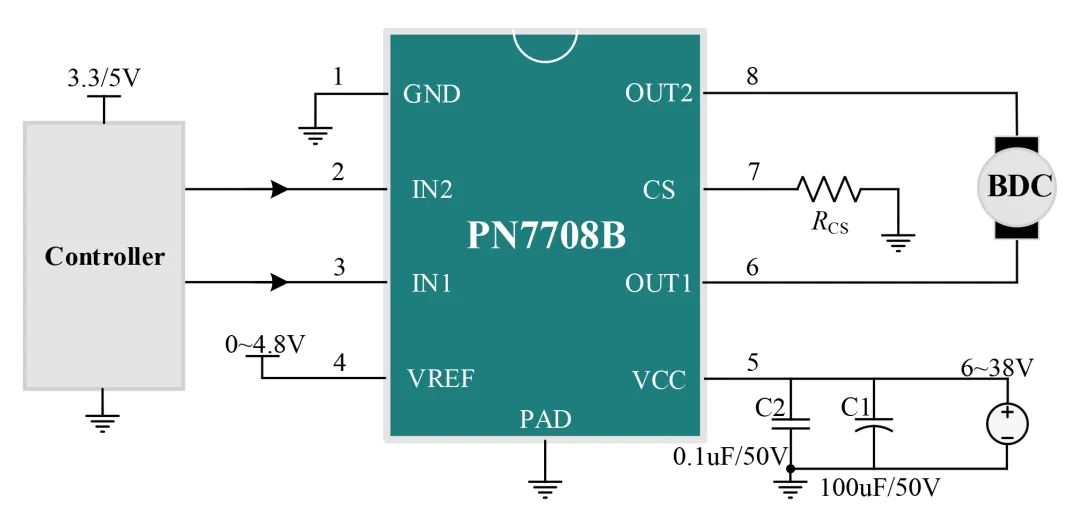
针对扫地机器人的双向轮电机驱动,我们强烈推荐明星物料PN7708B,其具有驱动能力大、温升小、抗干扰能力强和三温特性一致性好等亮点,完美替代市面常见的x4950及xxx8870等芯片。
主要特性
⦁ 电源电压:6V ~ 38V
⦁ 驱动电流:2.5A(连续),3.5A(峰值)
⦁ 导通内阻Rdson:0.36Ω (HS+LS)
⦁ 输入PWM控制(IN/IN)
⦁ 驱动电流限流 ILIMIT外部可设置
⦁ 低功耗睡眠模式:Ivcc <10uA
⦁ 全面集成保护功能:电源欠压保护,过温保护,输出短路保护
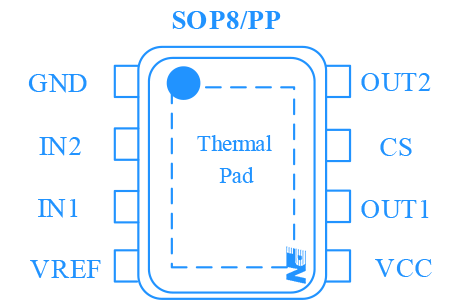
⦁ 采用SOP8-PP封装,脚位与国内外主要竞品兼容
亮点1:驱动能力大,温升小
双向轮电机驱动芯片痛点是扭矩和芯片温升。前者直接影响扫地机的通过性,特别是在粗糙的地板上移动时需要较大的扭矩,这直接取决于芯片在未触发过温保护前提下的驱动电流能力。而温升过大既会触发过温保护,也会影响电路周边元器件可靠性。
PN7708B采用低特征导通电阻功率集成MOS技术,可提供更大输出电流,并保证更低的温升。下表是PN7708B与竞品x4950在相同条件下的带载温升特性的实际测试对比:
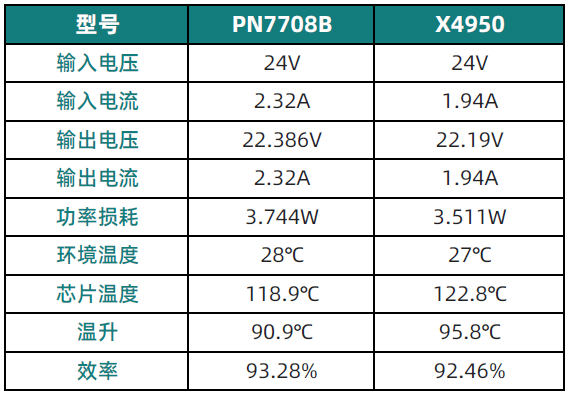
可以看到,在芯片壳温约120℃工况下,PN7708B持续带载能力达到2.3A,比竞品高20%。PN7708B温升90.9度,比竞品低5度。
亮点2:抗干扰性好
扫地机等由电池供电,一是由于电池本身电压的下降,二是由于大功率电机的启动或急刹急停,造成系统电压较大波动。两者叠加可能会导致芯片的VCC处于启动电压附近波动而频繁启动或关闭,也可能使得驱动芯片IN输入信号电压产生波动,导致输入高低电平的误判。
所以驱动芯片一般会给VCC及IN输入信号加滞回值(Hysteresis)。当VCC或IN输入电平有较大波动,其对应的滞回值较大能明显降低系统的不稳定状态,提升了系统的抗干扰性。
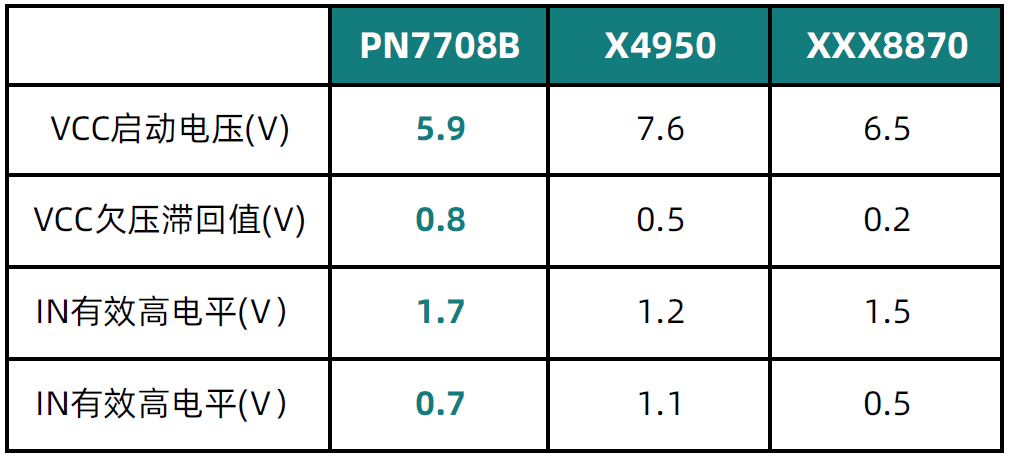
下表是PN7708B与竞品的VCC启动电压和IN电平的实际测试对比数据。VCC欠压滞回值0.8V,比竞品大。同时IN输入信号电压的滞回值约1V,比x4950明显高。
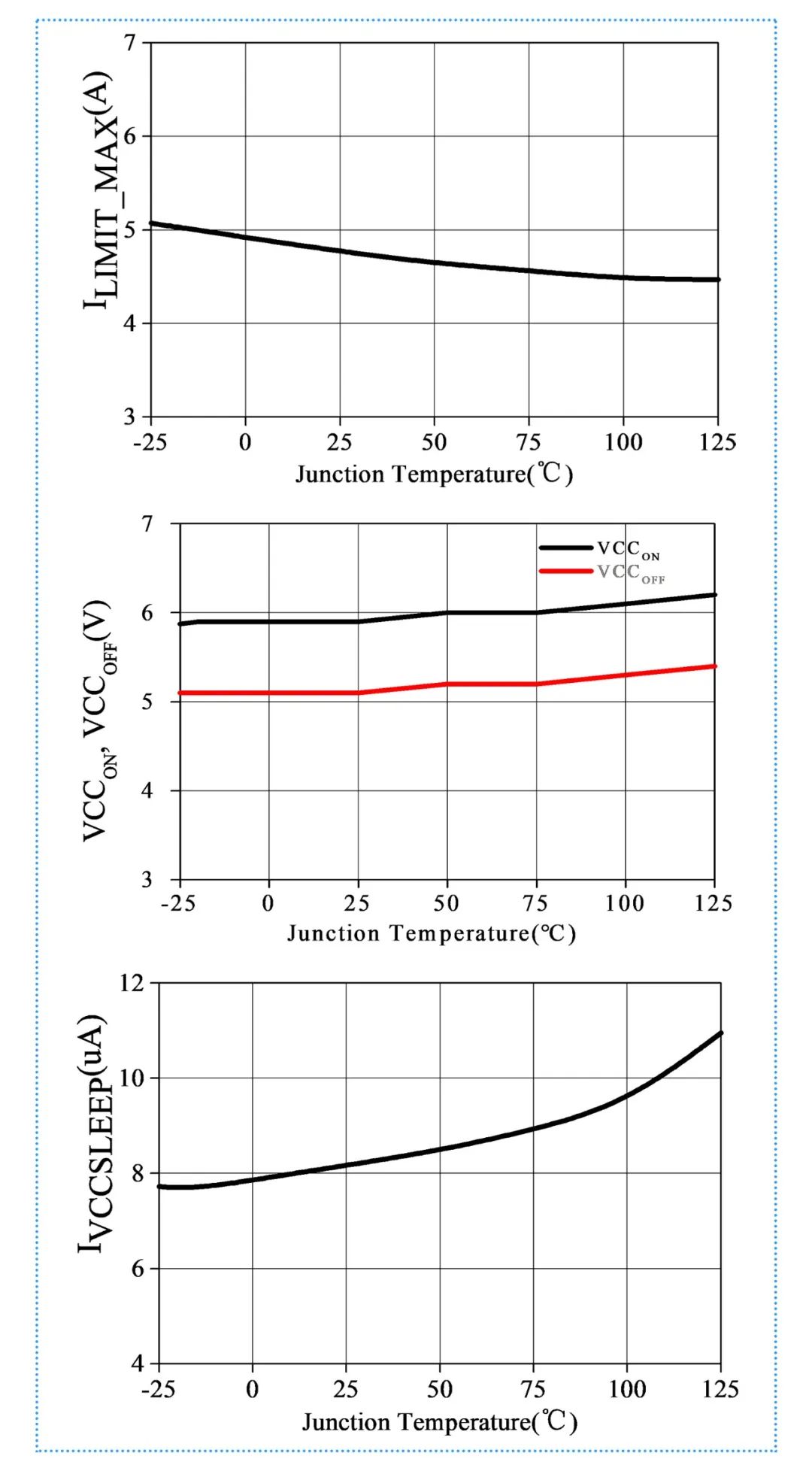
亮点3:三温特性一致性好
我们知道,芯片除了在常温条件下的性能,在高温和低温条件下的参数一致性更能体现芯片实际性能和可靠性。PN7708B采用多域温度补偿技术,确保了全温度范围内的参数一致性。
我们以下面PN7708的3个参数(ILIMIT限流点、VCCON /VCCOFF、静态电流)的全温度范围测试为例说明。可以面向看到,在结温-25°C~+125°C全温度范围内,各参数波动非常小,表现出非常好的一致性。
此外,除了常规的电源欠压保护和过温保护外,PN7708B特别针对电流有两级保护,分别是限流保护和短路保护,如下实测波形说明。
CH1:OUT1,CH2:OUT2,
CH3:IN1,CH4:IOUT
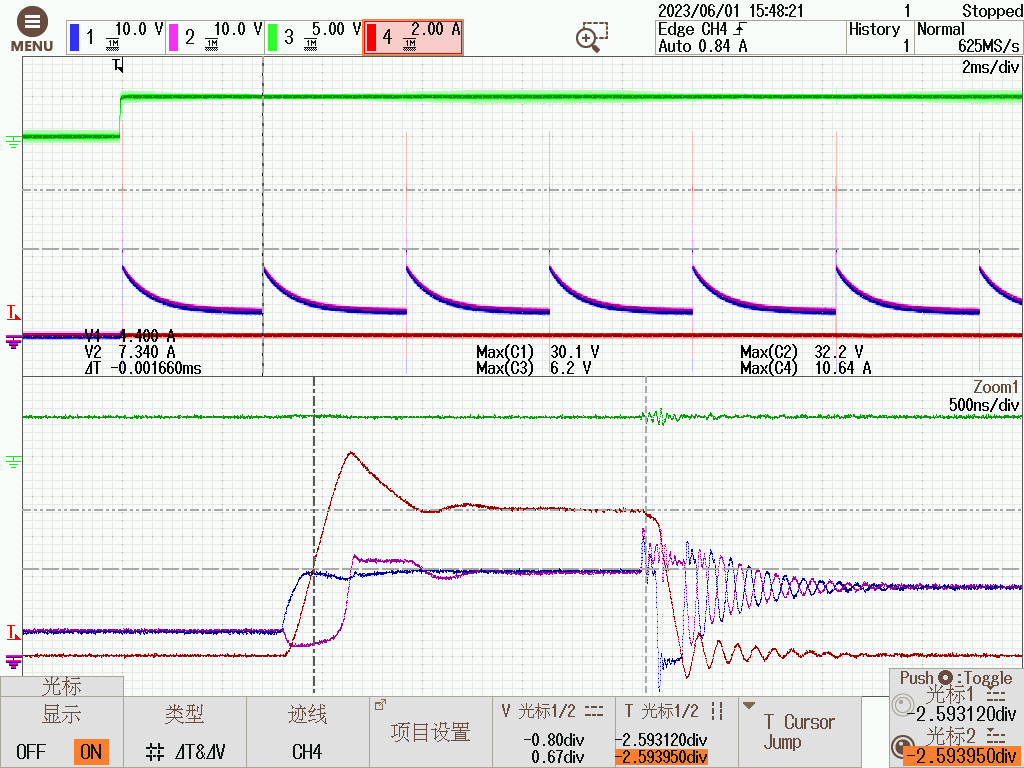
CH1:OUT1,CH2:OUT2,
CH3:IN1,CH4:IOUT
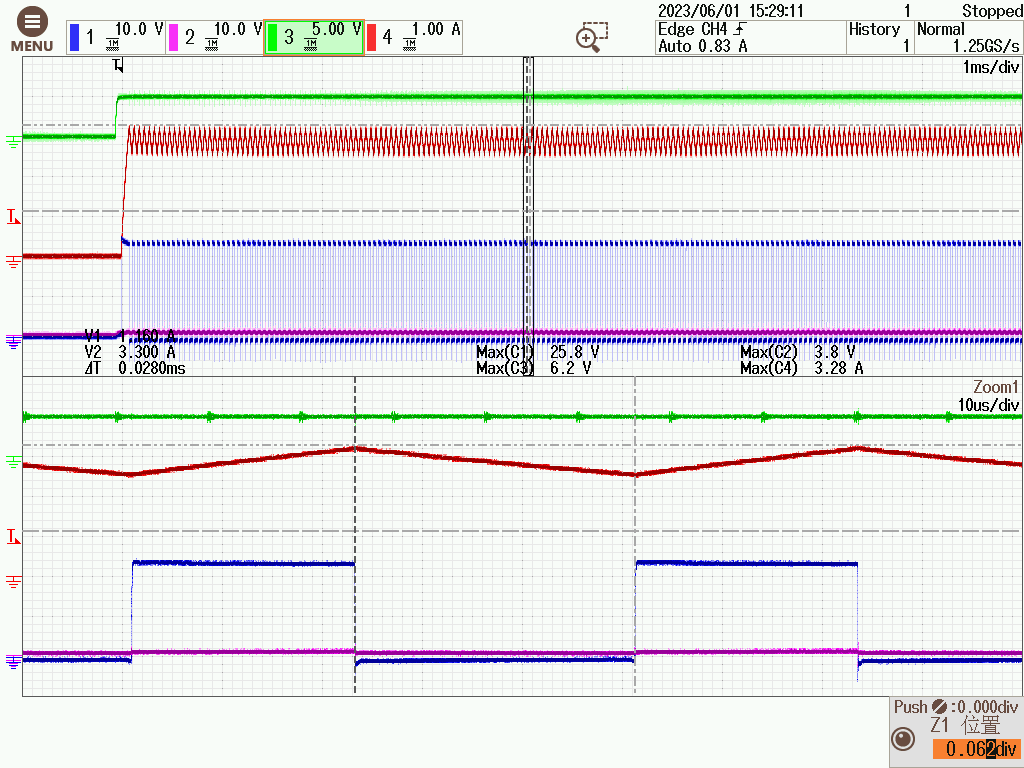
VREF=3.5V,CS=100mΩ,实测ILMIT电流=3.3A,此时两个下管打开,经限流时间=28us后,芯片再次尝试工作。
当电流大于OCP阈值电流后,经过屏蔽时间1.6us触发OCP保护,此时输出均关断,且经重启时间=2.69ms后,芯片再次尝试工作。
2PN7736/35 -- 四通道独立控制、
高耐压宽范围、保护功能全面
对于扫地机器人的单向侧刷,我们推荐四通道低侧驱动PN7735/36。一片可驱动4个边刷电机,也可并联使用驱动更大电流电机。不但能替代多个分离MOS加续流二极管,减少方案尺寸,而且大幅提升了产品可靠性。
PN7735/6—60V/1.5A四通道低侧驱动
(7735:串入并出,7736:并入并出)
主要特性
⦁ 电源电压:7.5V ~ 60V
⦁ 集成钳位二极管
⦁ 驱动电流:单通道1.5A(连续),四通道0.8A(连续)
⦁ 导通内阻Rdson:0.5Ω (低边)
⦁ PN7735:串口输入,并行输出;PN7736:并口输入,并行输出
⦁ 输出与输入反相
⦁ 集成保护功能:电源欠压保护,过温保护,输出短路保护
优势
⦁ 宽工作电压范围,单通道输出电流大
⦁ 内置续流二极管,防止感性电压尖峰,减少外围器件
⦁ 串/并口输入控制四个独立通道
⦁ 匹配延时低,可并联增强续流能力
⦁ 带散热焊盘的封装,散热性能好
⦁ 先进全面的片上保护功能,降低外围设计复杂度,提高系统可靠性
封装图
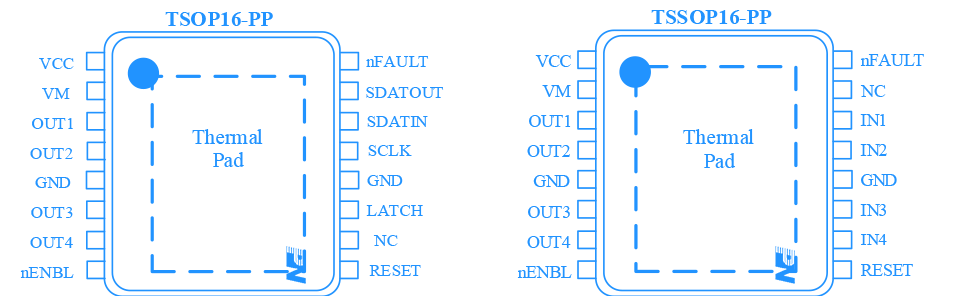
PN7735
PN7736
3PN7709 -- 超低内阻Rdson、FAULT
反馈功能、保护功能全面
对于扫地机器人的主刷电机驱动,由于电流较大,我们推荐PN7709,上下管导通内阻低至0.12Ω,驱动能力可达5A。如下。
主要特性
⦁ 电源电压:6V ~ 38V
⦁ 驱动电流:4A(连续),5A(峰值)
⦁ 导通内阻Rdson:0.12Ω (HS+LS)
⦁ 输入PWM控制(IN/IN)
⦁ 驱动电流限流 ILIMIT外部可设置
⦁ 低功耗睡眠模式:Ivcc <10uA(IN1=IN2=0维持1ms以上)
⦁ 全面集成保护功能:电源欠压保护,过温保护,输出短路保护
优势
⦁ 内置超低导通内阻的MOS以及带Thermal PAD的封装,散热性能好
⦁ 通过外部电流采样电阻设置ILIMIT电流,可灵活适应不同应用需求
⦁ 集成FAULT异常状态反馈功能
⦁ 先进全面的片上保护功能,降低外围设计复杂度,提高系统可靠性
封装图

最后,对于上述双向轮、边刷、主刷电机均属于直流有刷电机,
其驱动芯片应用注意事项如下:
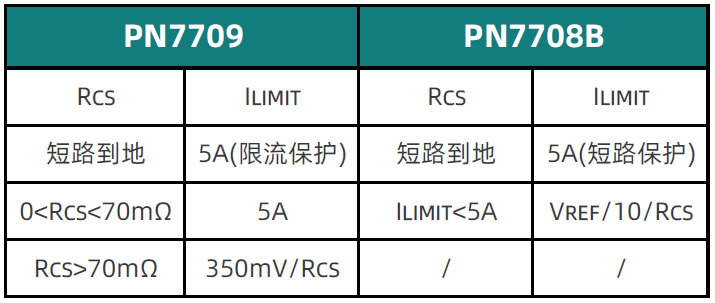
1,根据限流点选择CS电阻:
2,输入电容影响瞬间带载能力,推荐值100uF/50V以上,且需靠近VCC引脚摆放;
3,PCB布局是影响芯片散热能力的主要因素,顶层和底层的铺地平面需要有足够宽的尺寸,通过散热过孔将顶层和底层铺地平面连接。且铺地平面需连接到芯片的裸露散热焊盘,建议将芯片底部的铺地区域裸露开窗。
审核编辑:汤梓红
-
基于DRV8825驱动芯片的步进电机2020-09-09 13273
-
步进电机驱动芯片2008-05-23 11763
-
步进电机简介2010-05-24 2241
-
电动汽车驱动电机选型及制造简介2017-01-02 1045
-
对电机驱动的控制回路的基础概念介绍2019-04-24 4620
-
一文带你了解电机驱动芯片和电机驱动模块2021-07-18 20319
-
8825电机驱动芯片说明2022-06-28 1118
-
数码相机镜头电机驱动MS35009简介2022-07-21 2667
-
电机驱动芯片行业分析2023-03-16 1141
-
电机驱动芯片TLE9183QK2023-03-17 2423
-
电机和驱动器简介2023-05-16 1382
-
步进电机驱动芯片衰减模式是什么意思?2024-04-08 3731
-
国产电机驱动芯片助力智能门锁电机驱动领域2024-05-23 2212
-
如何选择合适的电机驱动芯片2024-11-21 2736
-
TMC6130:高效BLDC电机驱动芯片的深度剖析2026-07-09 213
全部0条评论

快来发表一下你的评论吧 !
