

步进电机闭环系统的组成和优缺点 闭环步进电机驱动的9大优势
工业控制
描述
来源:小牛机器人
步进电机基本上以开环电路驱动,用于位置控制 。换句话说,步进电机以外的电机尤其是高精度的步进电机之外并没有做开环控制定位的,而用开环电路驱动的电机只有步进电机。
例如无刷电机,首先为切换相,需要测出转子位置,需要含位置传感器的位置闭环电路。而且如果按一定速度驱动,需测出转子的速度,此为速度闭环电路;如果想定位控制,需要含有转子位置信号的编码器等传感器的闭环电路,此为位置闭环电路。与开环驱动的步进电机相比较,含传感器的闭环电路成本较高。因此, 步进电机被称为速度控制或位置控制的低成本驱动系统 。
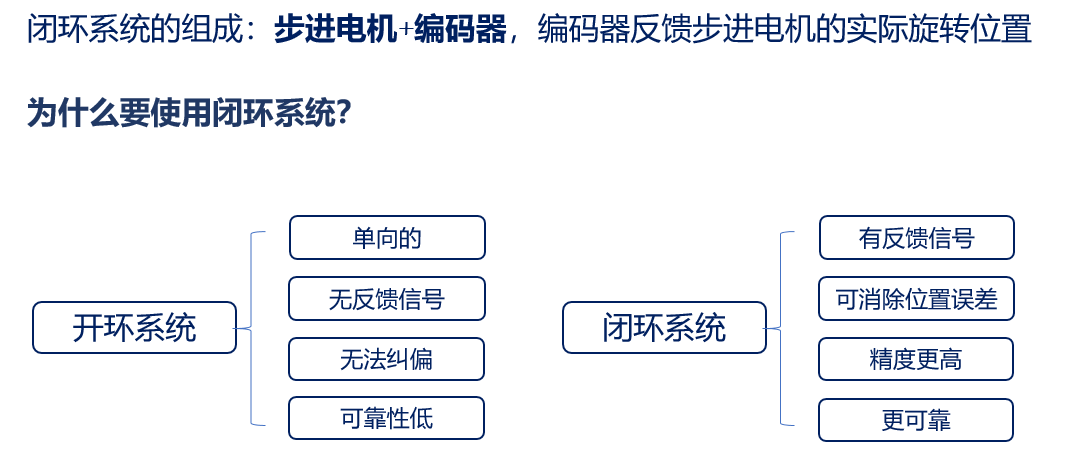
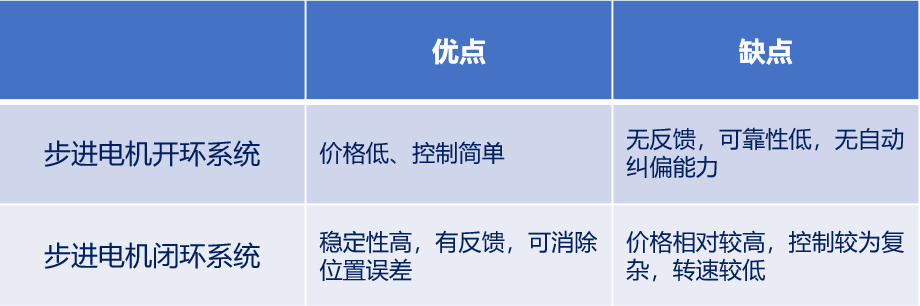
开环/闭环系统的优缺点:
步进电机的开环电路驱动在高速转动时,有失步、振动(噪声)以及高速运行困难等问题。为了弥补这些缺点,步进电机安装角度传感器,形成闭环控制,用以检测并避免失步。步进电机的闭环控制方式大致分为两种:
使激磁磁通与电流的相位关系保持一致,使其产生能带动负载转矩的电磁转矩,这种控制电机电流的方式与无刷直流电机控制方式相同,称为无刷驱动方式或电流闭环控制方法。
电机电流保持一定,控制激磁磁通与电流相位角的方式,称为功率角闭环控制方法。功率角为转子磁极与定子激磁相(或认为是同步电机的定子旋转磁场轴线也可以)相互吸引所成的相位角。
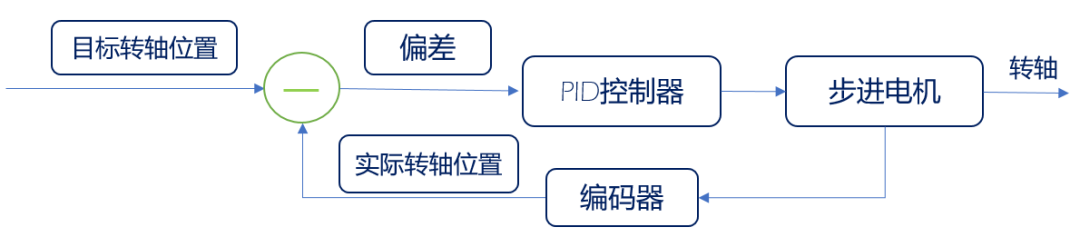
位置环控制流程
闭环步进电机驱动的9大优势:
众所周知伺服电机是带编码器并依靠编码器工作,而带编码器的闭环控制步进电机(步进伺服电机)兼有步进电机和伺服电机两者优点。
1、可频繁起动/停止
闭环步进电机驱动适用于需要频繁起动/停止的用途。
2、免增益调整
即使是在皮带机构、凸轮、链条驱动等负载发生变动的情况下,也可不用通过增益调节,便实现定位。而伺服电机中伺服系统的增益对电机性能有很大影响,而且调节伺服增益是很费时又费力的事情。
3、稳态静止,无抖动

伺服电机在停止时候由于依靠编码器定位需要增益调节因此无法做到绝对静止,而 步进伺服电机定位时无微小振动,通过电机自身保持力停止 ,因此最适合用于需无振动停止的低刚性机构用途,典型应用如光学领域等。
4、可实现大惯性负载的驱动
比起同等安装尺寸的伺服电机,步进伺服可驱动更大惯性的负载。
5、高速
得益于连续稳定可靠的电流控制技术,闭环步进电机可运行到3000-4000RPM不丢步。
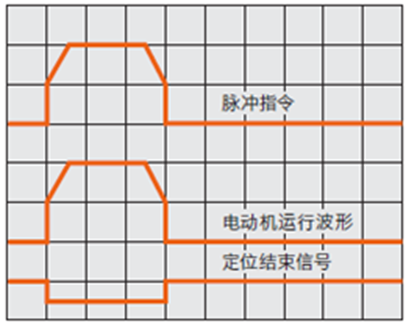
6、高响应
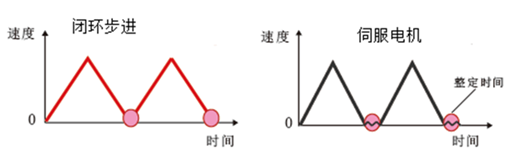
与开环步进电机一样,闭环步进电机与控制指令同步运行,因此能够在短行程、短时间完成精确定位。而通常伺服电机由于在停止时有位置整定时间不适应短行程定位场合。
7、大力矩
与传统的步进电机相比,闭环步进电机可以在非常宽的速度范围内输出很大的力矩,驱动可以做到100%的负载连续运行。无需担心电机驱动负载的能力,这与传统的微步(细分)驱动完全不同。步进伺服可以根据电机的转速采用独特电流控制技术做到高速范围内依旧可以输出大力矩。配合ADI Trinamic的CoolStep和Dcstep驱动器的输出电流会随着外部负载闭环动态增加或减少。
8、低速无振动,静音
由于驱动器采用了矢量控制技术,加之ADI Trinamic特有的StealthChop和SpreadCycle专利技术可以保证电机低速时候无振动,静音效果。
9、闭环电机发热,实现高效率
闭环步进与ADI Trinamic特有的Coolstep技术(电流随负载动态调节)结合,能减少电机发热,降低电机运行温度,提高效率的同时进一步节能。
步进电机闭环驱动解决方案推荐
传统的闭环方式是控制器、驱动器、电机分体式,控制器发出脉冲/方向控制驱动器,步进电机将编码器信号反馈到驱动器,有接线繁琐、售后服务不便、脉冲/方向控制信号容易受到强磁场干扰导致定位不准等诸多缺点,同时由于编码器信号只反馈到驱动器属于半闭环,无法检测控制部分的脉冲丢失。

传统半闭环步进方案
ADI Trinamic采用的位置全闭环控制模式,模块集成了总线接口、运动控制功能、输入输出、电机驱动和程序存储,编码器的信号反馈到模块内部完成闭环控制,具有布线简单、控制精确、售后维护方便等诸多优势。

ADI Trinamic全位置闭环步进方案
审核编辑:汤梓红
-
传统步进电机转型闭环控制2021-09-10 9766
-
针尖对麦芒,闭环步进电机对于伺服电机的优势?2015-12-29 3942
-
什么是闭环步进电机?2018-08-30 13250
-
什么是步进电机?步进电机有哪些优缺点?2021-06-18 5115
-
伺服电机和闭环步进电机有哪些不同之处2021-09-27 3533
-
闭环控制步进电机对比传统开环控制的优点2022-11-12 3096
-
开环步进电机与闭环步进电机系统对比分析哪一个更好?2023-03-10 2486
-
步进电机全闭环控制技巧2012-01-06 15692
-
闭环步进电机是什么_步进电机开环与闭环有何区别2018-04-25 112315
-
如何确定闭环步进电机的脉冲周期2021-08-14 2516
-
步进电机闭环驱动器使用教程2021-12-30 1811
-
比较闭环与开环步进电机的测试结果2022-08-11 6806
-
闭环步进电机驱动的9大优势2022-10-24 2491
-
步进电机的驱动与控制之闭环控制2023-03-22 1570
-
步进电机闭环系统的组成和优缺点 闭环步进电机驱动的9大优势2023-09-24 7120
全部0条评论

快来发表一下你的评论吧 !
