

无刷直流电机的结构与工作原理
工业控制
描述
最近在DIY无刷电机驱动,因为初次接触,所以有些许耗时,完成以后会在本公众号开源分享。本期文章整理了一下无刷电机的工作原理以及部分驱动电路。
无刷直流电机
直流电动机具有运行效率高和调速性能好的优点,但普通的直流电动机工作时需要用换向器和电刷来切换电压极性,在切换过程中容易出现电火花和接触不良现象会形成干扰并导致直流电动机的寿命缩短。无刷电动机的出现有效地解决了这个问题。
结构与工作原理
普通永磁直流电动机是以永久磁铁作为定子,以电枢绕组作为转子,在工作时除了要为旋转的电枢绕组供电,还要及时改变电压极性,这些需用到电刷和换向器。
由于电刷和换向器长期摩擦,很容易出现接触不良、电火花和电磁干扰等问题。为了解决这些问题, 无刷直流电动机采用永久磁铁作为转子,通电绕组作为定子,这样就不需要电刷和换向器了,不过无刷直流电动机工作时需要配套的驱动电路。
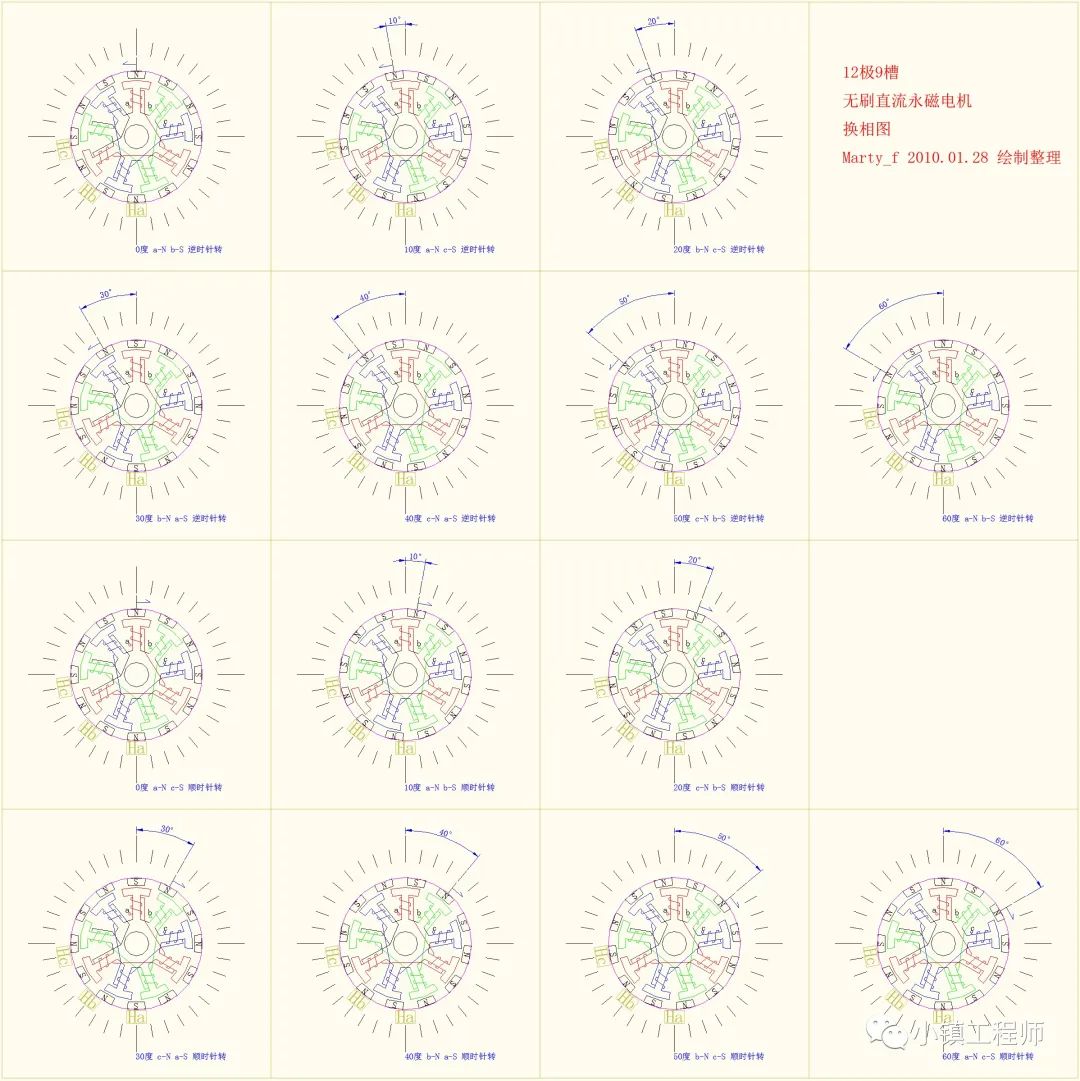
图1(源于网络)
图1为三相九槽十二极无刷电机的换相图,九槽可简单理解为该电机共有九个定子绕组,十二极则指转子共有十二个磁极,包含六个N极,六个S极。
因为无刷电机为三相,所以槽数始终为三的倍数,转子磁极则是成对出现,所以极数始终为偶数。
无刷直流电动机位置检测器采用霍尔传感器,距磁环转子很近,转子的不同磁极靠近检测器时,检测器输出不同的位置信号(电信号)。这里假设S极接近位置检测器时,检测器输出低电平信号0,N极接近位置检测器时,检测器输出高电平信号1。
驱动电路不断检测霍尔传感器的电平信号,根据此信号不断换相,让无刷电机旋转起来。

图2
图2为三相九槽十二级电机结构简图,图中红色三角形表示霍尔传感器(要注意,传感器之间互成40°),黄绿青三种颜色的矩形表示定子绕组,黄色为U相,绿色为V相,青色为W相。蓝橙相间的圆为转子,蓝色表示N极,橙色表示S极。黑色线为标示线,相邻两条黑线之间角度为10°。
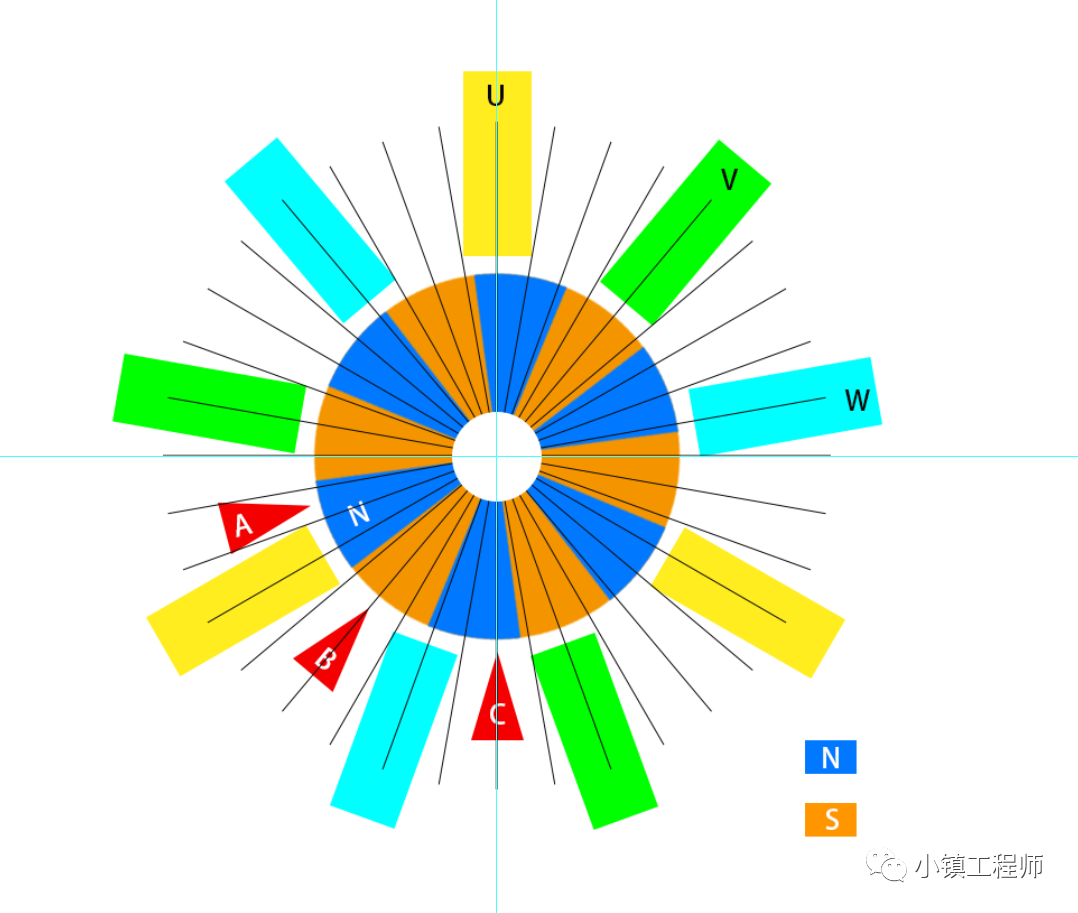
图3
假设图3为电机初始位置,读取霍尔传感器电平为:
A:1 B:0 C:1
我们要让电机顺时针转动,则应该使W相产生S极,V相产生N极,记作W_S和V_N。(绕组产生N极或S极根据右手螺旋定则判断即可)

图4
图4在图3的基础上顺时针转动了10°,可以通过黑线对比看出。读取霍尔传感器电平为:
A:1 B:0 C:0
我们要让电机继续顺时针转动,则应该使W相产生S极,U相产生N极,记作W_S和U_N。

图5
图5在图4的基础上顺时针转动了10°,可以通过黑线对比看出。读取霍尔传感器电平为:
A:1 B:1 C:0
我们要让电机继续顺时针转动,则应该使V相产生S极,U相产生N极,记作V_S和U_N。
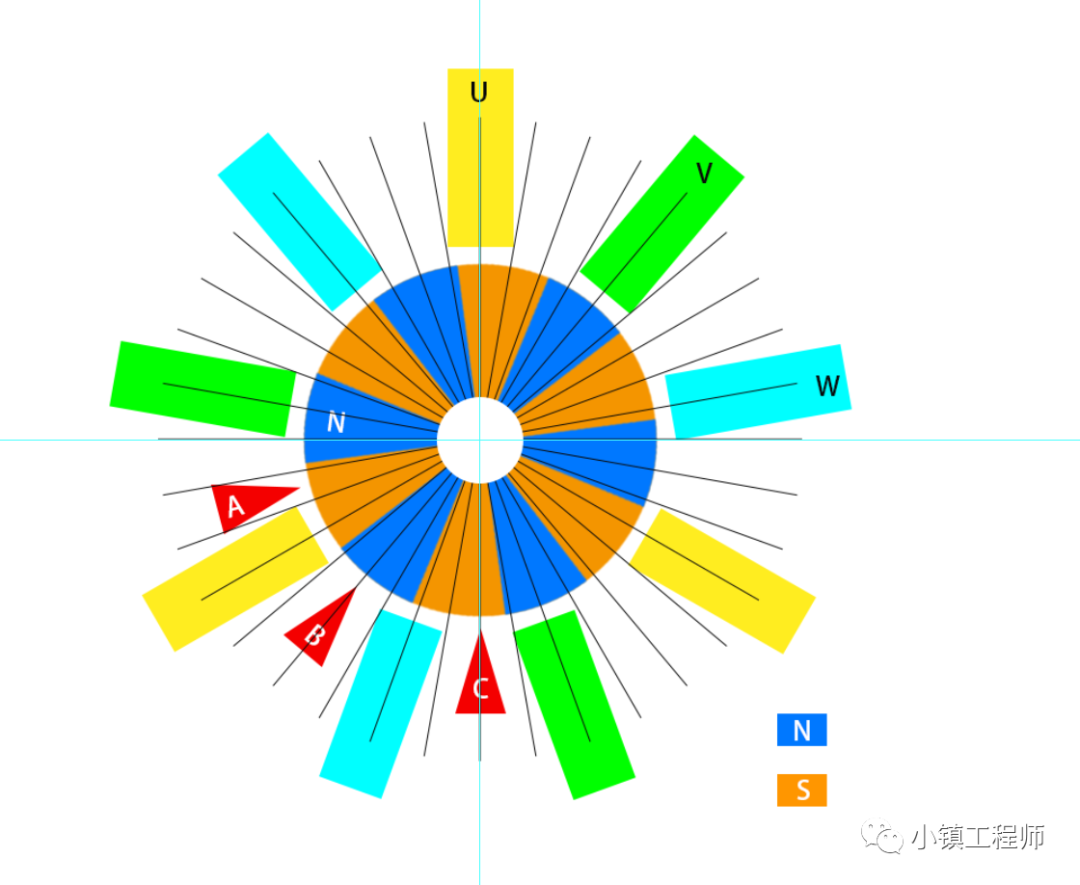
图6
图6在图5的基础上顺时针转动了10°,可以通过黑线对比看出。读取霍尔传感器电平为:
A:0 B:1 C:0
我们要让电机继续顺时针转动,则应该使V相产生S极,W相产生N极,记作V_S和W_N。
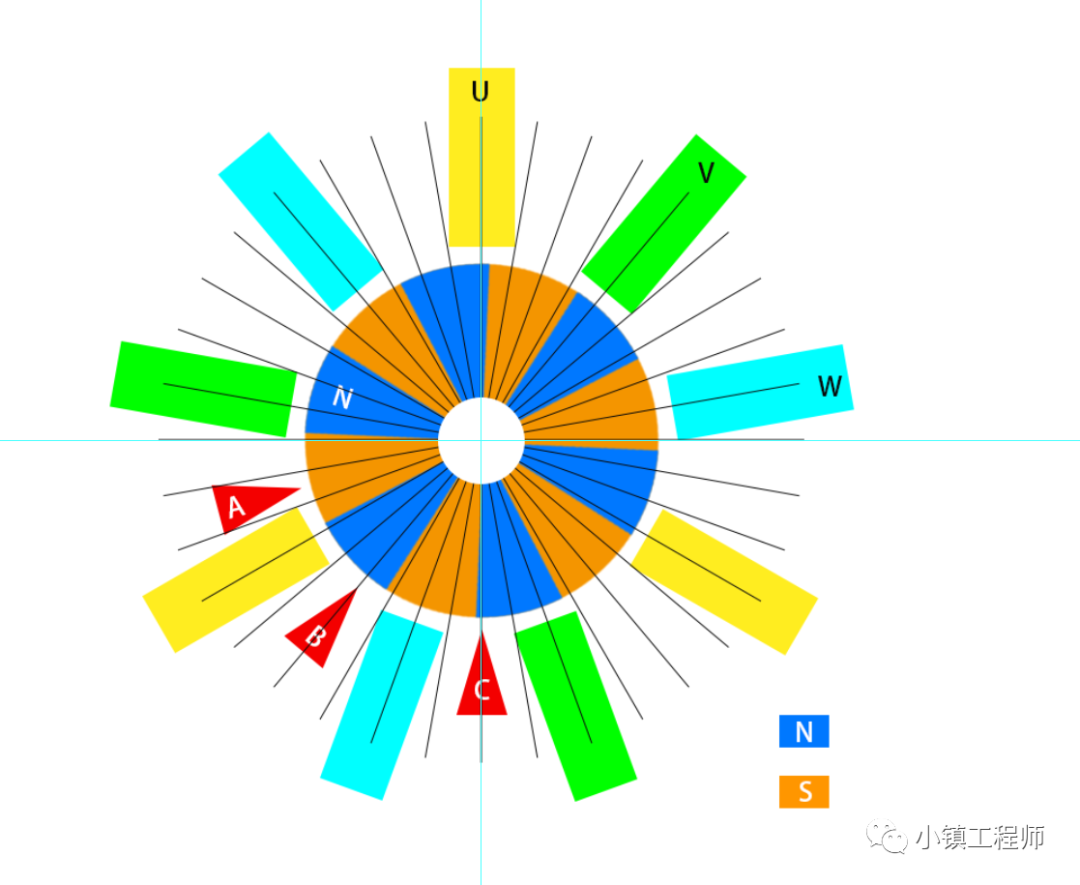
图7
图7在图6的基础上顺时针转动了10°,可以通过黑线对比看出。读取霍尔传感器电平为:
A:0 B:1 C:1
我们要让电机继续顺时针转动,则应该使U相产生S极,W相产生N极,记作U_S和W_N。
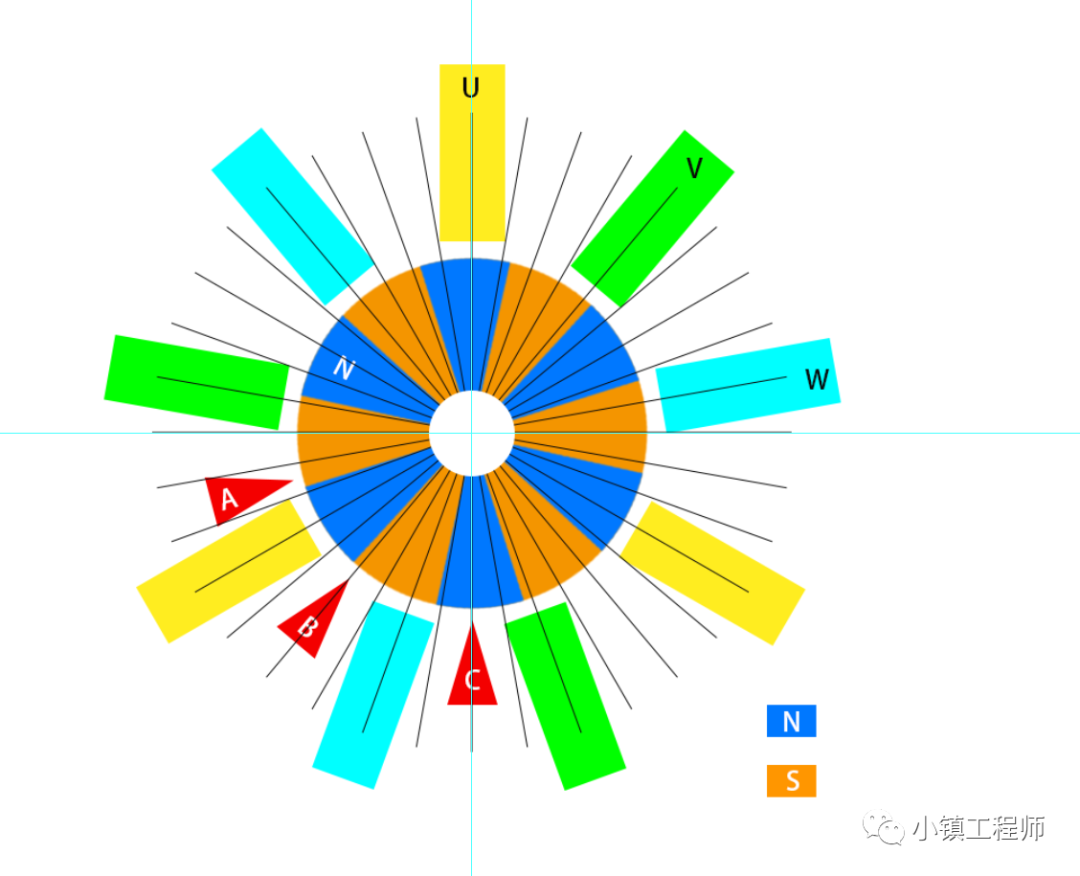
图8
图8在图7的基础上顺时针转动了10°,可以通过黑线对比看出。读取霍尔传感器电平为:
A:0 B:0 C:1
我们要让电机继续顺时针转动,则应该使U相产生S极,V相产生N极,记作U_S和V_N。
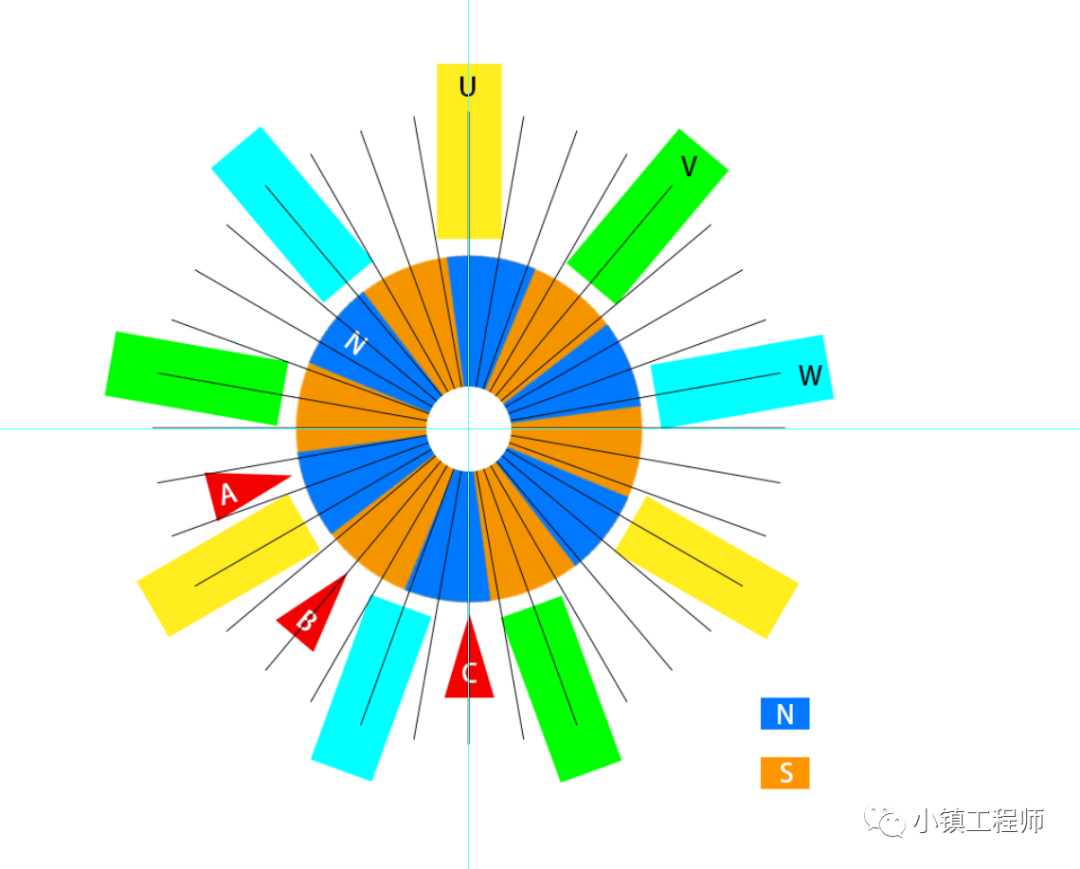
图9
图9在图8的基础上顺时针转动了10°,可以通过黑线对比看出。读取霍尔传感器电平为:
A:1 B:0 C:1
我们要让电机继续顺时针转动,则应该使W相产生S极,V相产生N极,记作U_S和V_N。
到此,转子一共旋转了70°,我们可以发现,现在的霍尔信号和图3一样了。接下来的信号变化将依次重复,也就是说,该电机的霍尔信号以60°为一个周期。转子每转动10°就会有一个霍尔信号跳变。
| A | 1 | 1 | 1 | 0 | 0 | 0 |
|---|---|---|---|---|---|---|
| B | 0 | 0 | 1 | 1 | 1 | 0 |
| C | 1 | 0 | 0 | 0 | 1 | 1 |
| V_N | U_N | U_N | W_N | W_N | V_N | |
| W_S | W_S | V_S | V_S | U_S | U_S |
驱动电路(部分)

图10
图10为部分驱动电路,图中MOTOR_U,MOTOR_V,MOTOR_W分别接无刷电机的三相电源线即可。
假如某一时刻我们要给U、V两相通电,那么只要给U1一个高电平,使Q1导通,然后再给V2一个矩形波即可。改变V2矩形波的占空比即可调速。也可以反过来,给V2一个高电平,给U1一个矩形波亦可。(电机内部一般已经按星形接法相接)
样例后续更新。
-
永磁无刷直流电机结构与工作原理(1)#电机未来加油dz 2023-07-30
-
无刷直流电机和有刷直流电机的区别2023-03-17 10403
-
无刷直流电机的结构及工作原理2023-03-08 1642
-
[7.1.1]--7.1永磁无刷直流电机结构与工作原理jf_75936199 2023-01-15
-
无刷直流电机的优势及工作原理2022-04-14 8212
-
无刷直流电机工作原理及PWM调速2021-09-15 3841
-
无刷直流电机工作原理2021-08-04 28622
-
无刷直流电机的结构和工作原理2020-11-19 22098
-
无刷直流电机的结构与特性2018-07-17 12276
-
无刷直流电机结构2016-12-15 1286
全部0条评论

快来发表一下你的评论吧 !
