

自动驾驶系统任务控制介绍
描述
任务控制
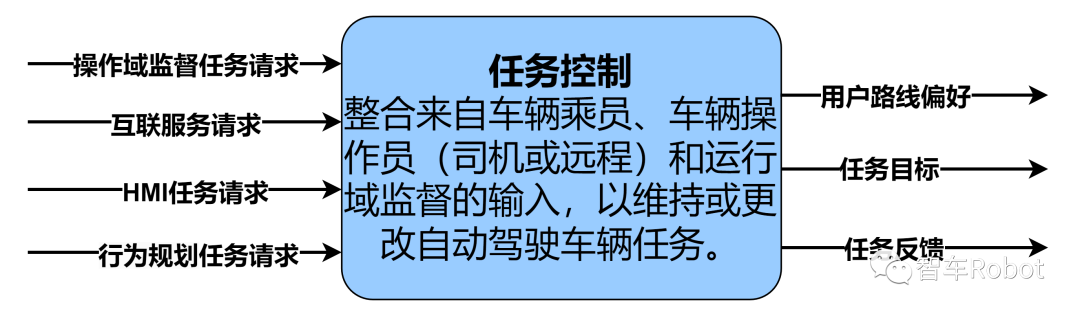
任务控制任务控制组合了来自车辆乘员、车辆操作者(司机或远程操作者)和操作域监督的输入,以维持或改变自动驾驶车辆任务问题目标和边界到路径规划。在此任务中,它使用两个关键抽象:
在这个任务中,它使用了两个关键的抽象概念:
•自动驾驶车辆任务:代表使用目的和驾驶状态的结合。包括目标目的地、行程中断、迭代和等待模式,以及任务期间驾驶状态之间的转换。
•驾驶状态:代表自动驾驶车辆、司机和潜在监督车队操作者的注意力和操作权限状态。驾驶状态包括最小风险条件转换、手动驾驶以及各种辅助和自动化驾驶级别。
注:在辅助驾驶(SAE L0-L2 级别,包括 L2+
扩展)的背景下,对通用功能块图提出以下解释:用户主动的操作,比如踩踏油门、转动方向盘以直接控制或略微引导车辆运行轨迹,从这个简化的架构的角度来看,是对任务目标和用户路线偏好的短期设置变更。这些变更通过HMI任务请求从人机界面接收。
因此,这些抽象概念具有扩展的传统意义。这些解释包括“立即右转”或“加速”(均为用户路线偏好))以及更复杂的辅助行为,比如“如果交通情况允许,进行监控的自动超车”或“根据左转指示灯是否打开改变自适应巡航控制(ACC)”。作为下游结果,“路线目标”(传递给行为规划)可能反映用户主动操控。
任务控制输入:
•操作域监督任务请求:操作域监督系统的条件分析触发的改变自动驾驶车辆任务,可能启动驾驶状态短期变化,在任务控制责任下进行状态转换。任务改变也可能导致任务目标信号变化。
•连接服务任务请求:连接服务触发改变自动驾驶车辆任务,将导致任务目标信号变化,作为被修改的任务的二阶效应,驱动状态可能会发生变化。
•人机界面任务请求:任何类型用户交互触发改变自动驾驶车辆任务,可能立即改变驾驶状态,进而改变任务目标信号。
•行为规划任务请求:行为规划触发改变自动驾驶车辆任务,如识别/响应交通情况变化以重新计算用户路线偏好。任务控制输出:
•用户路线偏好:通过提取自动驾驶车辆任务中数据生成,以在完成任务的同时最小化离开当前操作域的风险。
任务目标:从自动驾驶车辆任务生成,作为使用目的表达。
•任务反馈:综合自动驾驶车辆任务和四个请求信号,判断是否需要驾驶员警报、特定行动请求或提供进度报告。
-
FPGA在自动驾驶领域有哪些应用?2024-07-29 8427
-
【KV260视觉入门套件试用体验】八、VITis AI自动驾驶多任务执行MultiTask V32023-09-26 9527
-
自动驾驶线控底盘VCU功能介绍2021-09-07 3135
-
自动驾驶技术的实现2021-09-03 3287
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 2510
-
自动驾驶OS市场的现状及未来 精选资料推荐2021-07-27 2563
-
自动驾驶系统要完成哪些计算机视觉任务?2020-07-30 2281
-
自动驾驶汽车的处理能力怎么样?2019-08-07 2944
-
如何让自动驾驶更加安全?2019-05-13 3798
-
UWB主动定位系统在自动驾驶中的应用实践2018-12-14 3332
-
高级安全驾驶员辅助系统助力自动驾驶2018-09-14 3492
-
自动驾驶的到来2017-06-08 7501
-
自动驾驶真的会来吗?2016-07-21 14638
全部0条评论

快来发表一下你的评论吧 !
