

驾驶策略什么意思自动驾驶
描述
行为规划(驾驶策略)
行为规划(BP)功能模块提供算法以在路线目标内做出机动决策。
使用多模型路径规划算法进行机动,给定目标跟踪和空间及走廊内所有动态对象的预测行为,行为规划器同时评估多种可能的机动,然后将其与更新的道路观测相关联。行为规划需要在车辆安全性和舒适性的基础上平衡驾驶效率。驾驶效率意味着确定最佳车道或道路以快速到达目的地,而舒适性考虑则意味着安全地到达那个车道或走廊。车道排名和可行性检查是车辆行为规划的两个核心要素。
关于车道排名,算法遵循三个主要原则:
- 车道变化越少越好。
- 距离前方移动物体越远评分越高。
- 前方物体的速度越快,车辆在车道上的行驶速度就越快。在每个可能的车道排名之后,定义它们的可行性并分配成本。
下图显示了算法如何定义可行性的示例,以及如何选择成本更低的机动列表。
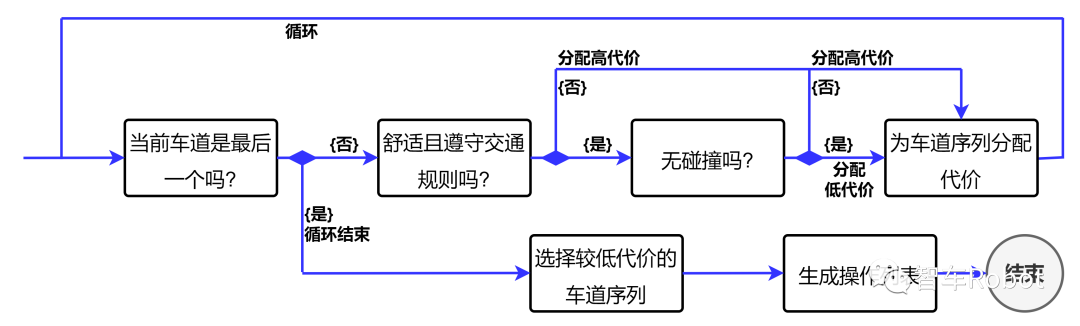
车道排序决策树
机动列表包含要由车辆执行的高级语义决策及物理参数,机动的示例可以是(不详尽):
•巡航:在当前车道内,以设定速度。
•跟随:保持在当前车道,以提供的速度限制行驶,以最小距离跟随前车,以提供的速度和ID。
•转向:从当前车道转到目标车道,左转或右转,以提供的转向速度 。
•改道:从当前车道移动到目标车道,以提供的加速度超车目标车辆[或以提供的减速度让目标车辆通过]。•停止:在提供的距离内减速到零速度并保持在当前车道。
行为规划输入:
•静态对象预测:用于评估机动的安全性和舒适性。
•动态对象预测:用于评估机动的安全性和舒适性。
•路线目标:提供基本指导原则,例如车道或行驶走廊,用于机动决策。
•基于场景的机动约束:用于排除被当前驾驶场景条件禁止的机动。
•基于操作域监控的机动约束:确保自主车辆的结果机动不违反当前操作设计域边界条件。
•自车运动:用于机动评估。
行为规划输出:
•感兴趣区域(ROI):提供一个或多个应优先处理的感知区域的描述。
•机动:提供要由自主车辆执行的高级语义决策及物理参数。
•行为规划任务请求:由行为规划器请求修改任务。如果行为规划器确定无法按计划进行任务,则可能需要这样做。请求的性质可以是请求人类司机接管,例如。
•自主车辆机动假设:准备一个或多个假设的机动,系统可以为此预测一个或多个结果。
-
FPGA在自动驾驶领域有哪些应用?2024-07-29 8399
-
自动驾驶技术的实现2021-09-03 3259
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 2484
-
如何保证自动驾驶的安全?2020-10-22 2221
-
联网安全接受度成自动驾驶的关键2020-08-26 3363
-
自动驾驶汽车的处理能力怎么样?2019-08-07 2925
-
如何让自动驾驶更加安全?2019-05-13 3776
-
无人驾驶与自动驾驶的差别性2017-09-28 6576
-
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛2017-09-13 7584
-
自动驾驶的到来2017-06-08 7477
-
细说关于自动驾驶那些事儿2017-05-15 7231
-
自动驾驶真的会来吗?2016-07-21 14599
-
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?2016-07-05 14375
-
汽车自动驾驶技术2016-04-14 5608
全部0条评论

快来发表一下你的评论吧 !
