

自动驾驶操作域监督是什么
描述
操作域监督(ODS)
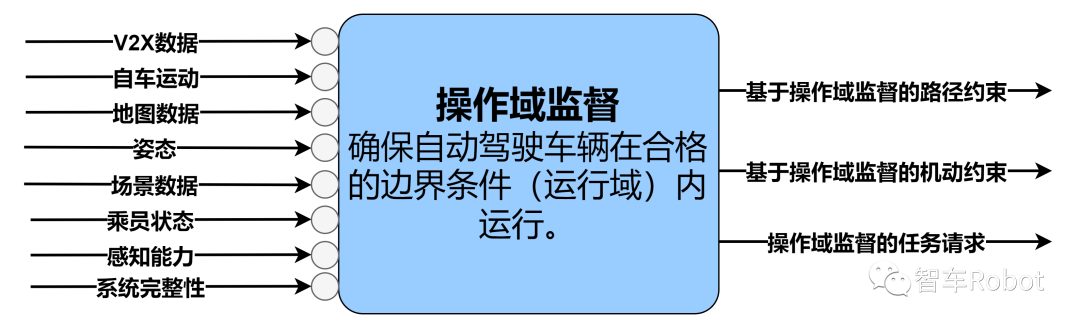
操作域监督功能模块图
操作域监督模块监控与动态驾驶任务相关的能力、状态和情况,目的是确保自动驾驶车辆在操作设计域及其他适用的动态和静态约束下运行。它使用两个操作域表示实现运行时监控:
•授权操作域表示设计意图操作设计域和当前适用状态的并集,根据立法、验证和/或解决漏洞的行动,该域可能在系统生命周期中发展。
•当前操作域表示上述基线域的有条件约束子集,由下述条件集修改。
操作域监督主要影响任务控制功能,但也指导路径规划和行为规划。
一组主要条件指导操作域监测:
•机动能力:通过对场景数据、自车运动和V2X输入信号的解释,定义自动驾驶车辆的机动包线。
•交通情况:提供当前和未来位置的其他道路使用者信息。
•道路系统状态:包括道路表面、道路语义以及地理围栏的动态和静态方面。
•驾驶员能力:评估驾驶员接管控制、自动紧急行动或其他任务改变的参与度。
•乘员状态:指示自动驾驶车辆乘客状态,以终止或更改任务。
•感知能力:表示传感器状态、算法置信度和与感知相关的环境条件。
•系统完整性:包括传感器、执行器、支持系统和计算单元的技术状态,涵盖功能安全、可靠性、可用性和安全角度。
操作域监督信号输入:
•V2X数据:用于确定机动能力、道路系统状态和交通情况。
•自车运动:用于确定机动能力。
•地图数据:用于确定道路系统状态,并生成基于操作域监督的路线约束。
•姿态:用于确定道路系统状态。
•场景数据:用于确定机动能力、道路系统状态和交通情况。
•乘客状态:用于确定驾驶员能力和乘客状况。
•感知能力:直接用作操作域监控的一个主要条件。
•系统完整性:直接用作操作域监控的一个主要条件。
操作域监督信号输出:
•基于操作域监督的路径约束:通过组合主要条件集与地图数据生成路线约束,以确保当前驾驶状态的边界得到维持。
•基于操作域监督的机动约束:通过组合主要条件集生成机动约束,以确保在当前和后续状态及位置保证机动性。这可以使车辆保持在当前自动驾驶任务内,而不会超出操作设计域边界条件。
•操作域监督的任务请求:如果项目立即或未来将离开操作域,则生成该请求以通过改变自动驾驶任务来解决此问题,作为中期或短期策略来避免离开操作域。该请求可能导致驾驶员状态转变,例如从自动驾驶转为手动驾驶。
-
FPGA在自动驾驶领域有哪些应用?2024-07-29 8399
-
汽车自动驾驶技术2016-04-14 5608
-
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?2016-07-05 14375
-
自动驾驶真的会来吗?2016-07-21 14599
-
细说关于自动驾驶那些事儿2017-05-15 7231
-
自动驾驶的到来2017-06-08 7477
-
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛2017-09-13 7584
-
UWB主动定位系统在自动驾驶中的应用实践2018-12-14 3314
-
如何让自动驾驶更加安全?2019-05-13 3776
-
自动驾驶汽车的处理能力怎么样?2019-08-07 2925
-
联网安全接受度成自动驾驶的关键2020-08-26 3363
-
如何保证自动驾驶的安全?2020-10-22 2221
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 2484
-
自动驾驶技术的实现2021-09-03 3259
-
自动驾驶系统任务控制介绍2023-10-04 1644
全部0条评论

快来发表一下你的评论吧 !
