

自动驾驶运动控制原理
描述
运动控制(激活)
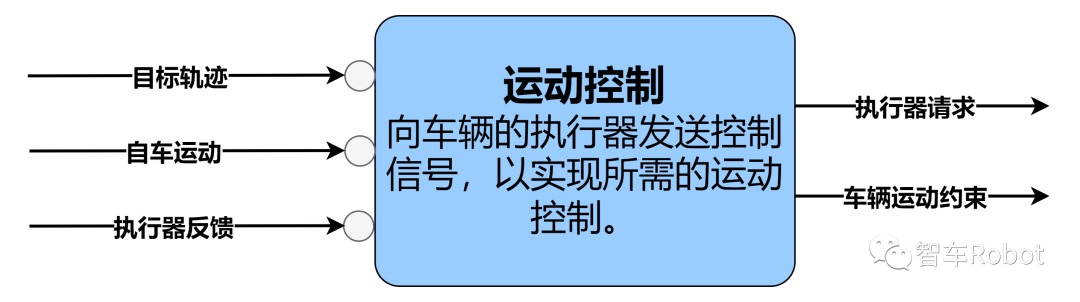
运动控制功能模块图
运动控制(激活)功能模块负责请求与自主车辆运动相关的推进变化,包括但不限于加速请求、制动请求和转向请求。
责任包括:
•提供与各种外部执行模块的接口,如电动助力转向(EPS)、自动制动(ABS)、PRNDL变速箱齿轮选择、牵引控制等。
•提供必要的中间件层来管理与外部执行模块完整且足够的接口,这些模块具有不同的复杂性和能力级别。例如,外部执行模块可以包括基于环境数据和条件的学习能力,或者它可以是一个简单的、传统的基于请求的系统。
•接收、管理和展示外部执行模块呈现的车辆运动约束,并呈现给其他自动驾驶系统功能模块。这可能包括聚合、同步、统计分析和封装等活动。
•将目标轨迹转换为针对外部模块的适当执行请求,包括考虑自车运动输入和外部执行器预测。
•根据需要为外部执行模块进行预处理。
运动控制输入:
•目标轨迹:**来自轨迹规划的请求,是运动控制(激活)输出的主要考虑因素。
•自车运动:**接收自主车辆姿态信息,与目标轨迹一起考虑以生成执行器请求。
•执行器反馈:**向系统暴露车辆运动约束。由于运动控制(激活)可以与各种外部执行模块接口,此反馈在单位、格式、类型等方面将有所不同。
运动控制输出:
执行器请求:**向多个外部执行模块提供主要请求输出。
车辆运动约束:**提供外部执行模块的限制反馈,汇总后呈现给其他自动驾驶系统模块,如轨迹规划(路径规划)。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
FPGA在自动驾驶领域有哪些应用?2024-07-29 8404
-
谷歌的自动驾驶汽车是酱紫实现的吗?2011-06-14 4834
-
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?2016-07-05 14382
-
自动驾驶真的会来吗?2016-07-21 14605
-
细说关于自动驾驶那些事儿2017-05-15 7237
-
自动驾驶的到来2017-06-08 7479
-
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛2017-09-13 7588
-
【PYNQ-Z2试用体验】基于PYNQ的神经网络自动驾驶小车 - 项目规划2019-03-02 5155
-
如何让自动驾驶更加安全?2019-05-13 3784
-
自动驾驶汽车的处理能力怎么样?2019-08-07 2930
-
自动驾驶汽车中传感器的分析2020-05-14 3636
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 2487
-
自动驾驶技术的实现2021-09-03 3268
-
自动驾驶线控底盘VCU功能介绍2021-09-07 3117
全部0条评论

快来发表一下你的评论吧 !
