

KUKAC2机器人程序备份指导书
描述
最近出了C4机器人我又捡起了C2机器人的维修工作,由于本身对C2的接触时间不久就开始学习了C4机器人,因此很多时候没有C4机器人掌握的好。这几天就一直在解决机器人需要插2个U盘才能备份的问题。
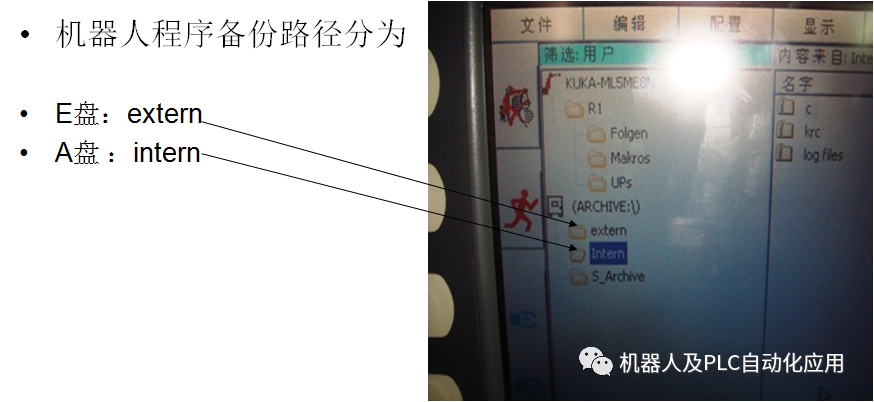
我们在备份机器人程序时,有时需要插入2个U盘,两个U盘,一个是A盘 :intern ,另外一个是E盘:extern。两者的的区分在于先插入系统的系统会认为是A盘 :intern,后插入系统的系统会认为是E盘:extern。两个U盘在备份中最大的区别在于,A盘备份程序时,所有机器人备份出来的程序名只能是intern.zip,所以A盘里只会存在一个程序,而E盘备份出来的程序名称是可以自己定义的,只要现场机器人名称定义的不一样,所有机器人程序就都可以存到这个U盘里。
•在系统C:/KRC/UTIL/KRCCONFIGURATOR目录下找到
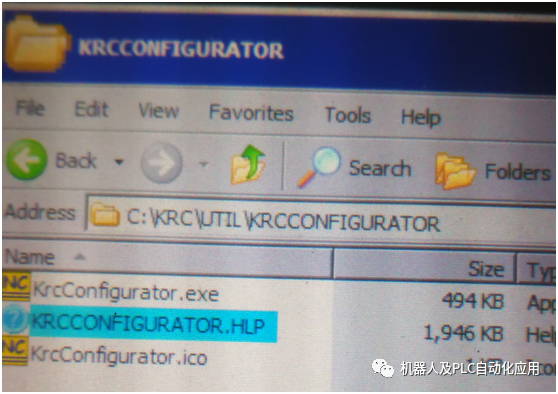
•krcConfigurator.exe文件,里面有存储机器人程序的路径
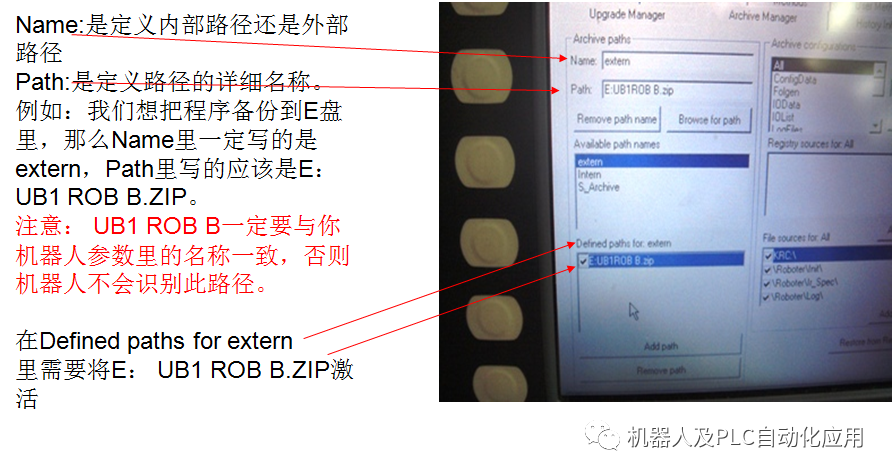
Name:是定义内部路径还是外部路径
Path:是定义路径的详细名称。
例如:我们想把程序备份到E盘里,那么Name里一定写的是extern,Path里写的应该是E:UB1 ROB B.ZIP。
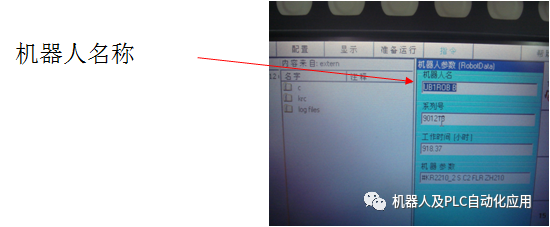
注意:UB1ROB B一定要与你机器人参数里的名称一致,否则机器人不会识别此路径。
在Defined paths forextern
里需要将E:UB1 ROB B.ZIP激活
extern外部盘存储地址要选择设置为E 盘,Intern内部盘存储地址也要改为E盘
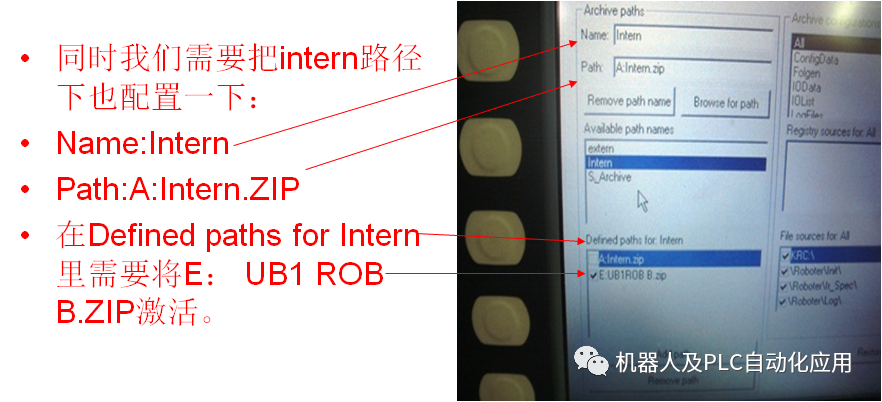
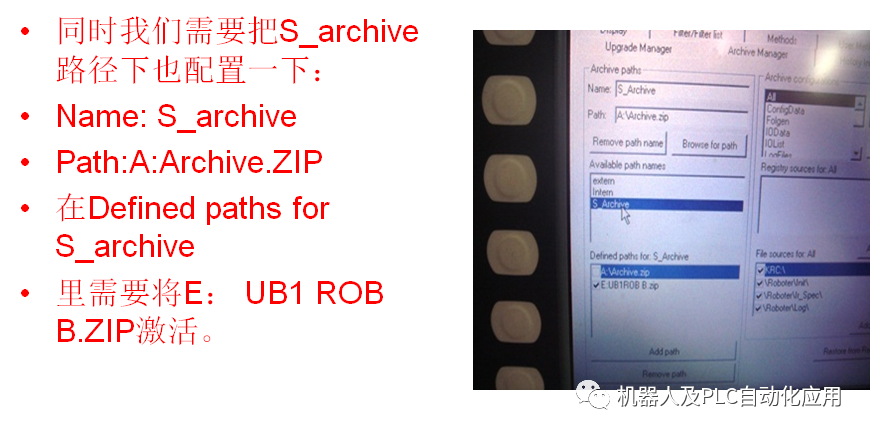
•同时我们需要把intern路径下也配置一下:•Name:Intern•Path:E:机器人的名字.ZIP在Definedpaths for Intern里需要将E:UB1ROB B.ZIP激活。
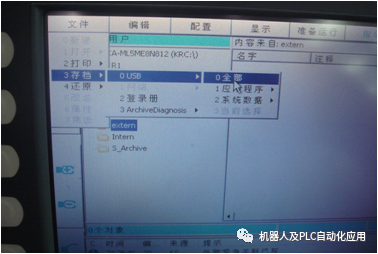
•我们备份程序时有两种途径。
•1.在菜单条:文件/存档/USB/全部。
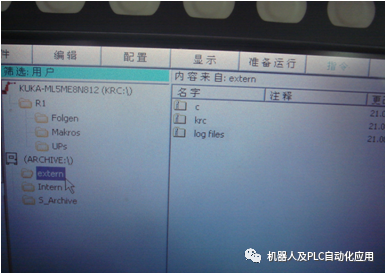
•2.在ARCHIVE:/里选择 intern还是 extern ,全部存档。两种方式都可以。当我们备份完程序后应该看一下extern里是否有程序存在,如果有则证明成功
-
介绍一下KUKAC2机器人关于INTERBUS PCI卡进行主从配置的文件2023-02-20 4231
-
KRC机器人在过程数据通信方面扮演各种角色2022-08-01 1288
-
KUKAC2机器人程序备份如何操作2020-12-23 10153
-
KUKAC2机器人程序备份更改路径2020-08-10 5408
-
《机器人设计与实现》——低成本DIY机器人,一本机器人制作的经典入门书2017-08-01 194862
-
ZY08-C-G智能循迹机器人安装指导书2016-12-28 3011
-
ABB机器人操作员手册RobotStudio2016-08-19 1462
-
推荐玩机器人的书2016-01-08 5568
-
MATLAB基础实验指导书2015-10-30 796
-
机器人备份系统是怎样操作的?2015-01-16 5264
-
SZ-DSPD实验指导书例子程序alldsp4-22012-08-20 3290
-
智能机器人实物教学模型实验指导书2012-08-03 2082
-
编译原理实验指导书2009-03-26 3133
-
实验指导书格式2008-09-24 3691
全部0条评论

快来发表一下你的评论吧 !
