

一文详解CAN总线
接口/总线/驱动
描述
前面已经介绍了几种总线协议,那现在如果在汽车上实际应用一种总线协议来通讯的话,你会选择哪一种呢?
答案是 都不行
因为在汽车中许多系统都需要实时控制,而且数据必须可靠,即使面对面对恶劣环境也要正常运行
如何解决这个问题呢?就要看CAN总线了
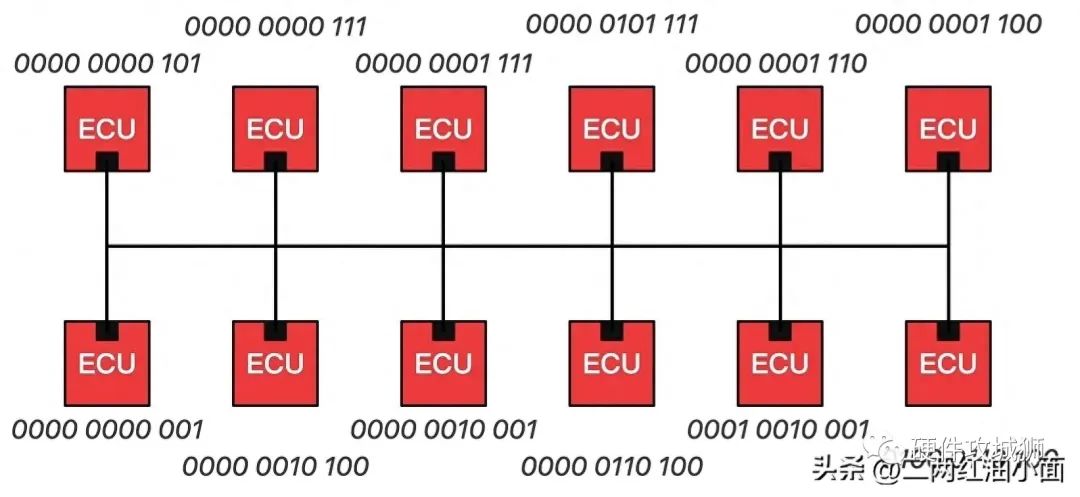
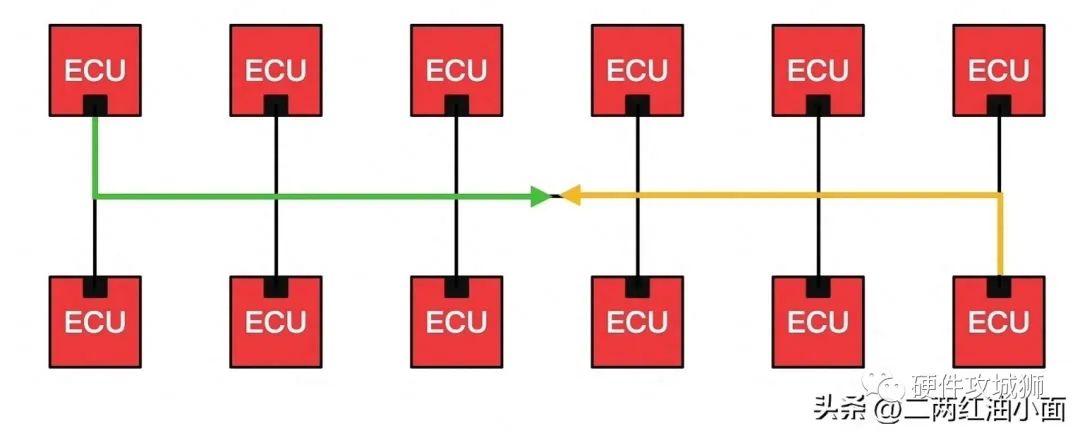
ECU
如何传输数据?
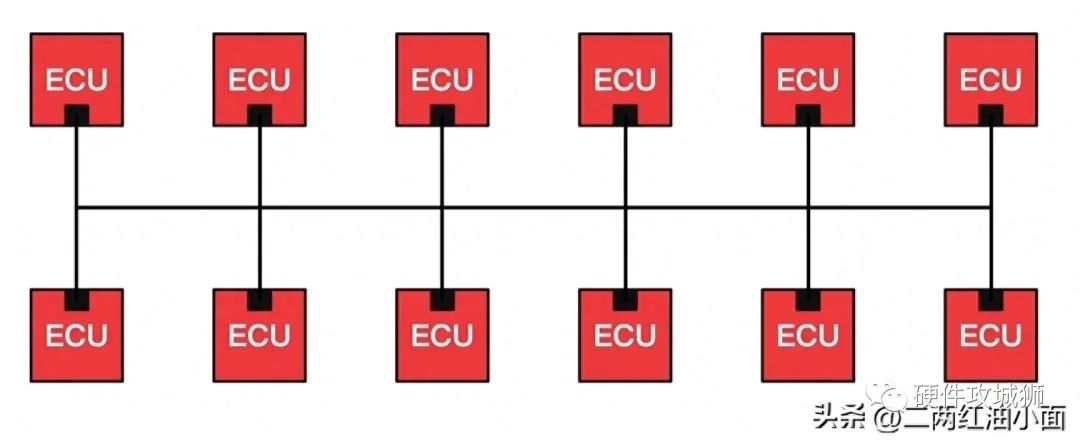
现在将车上的每个设备用一条总线连接起来
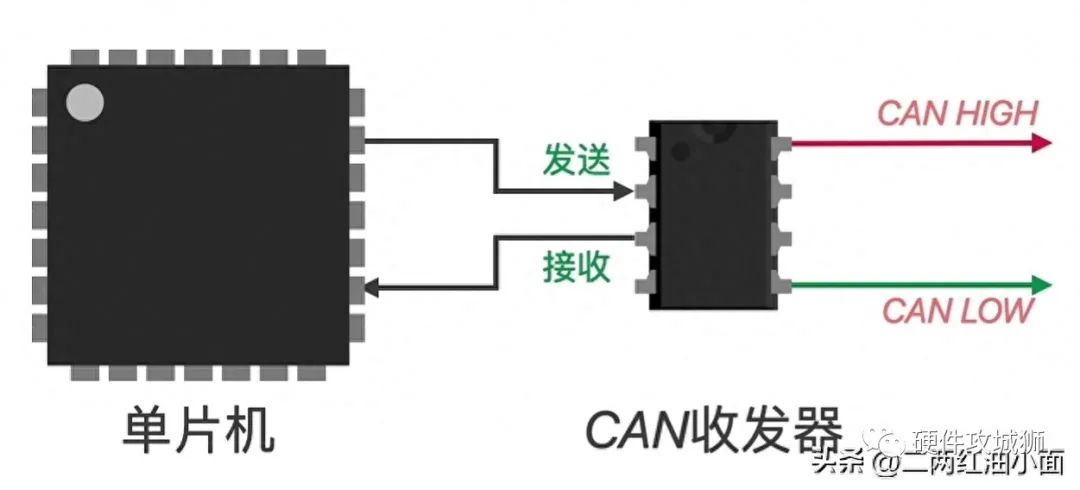
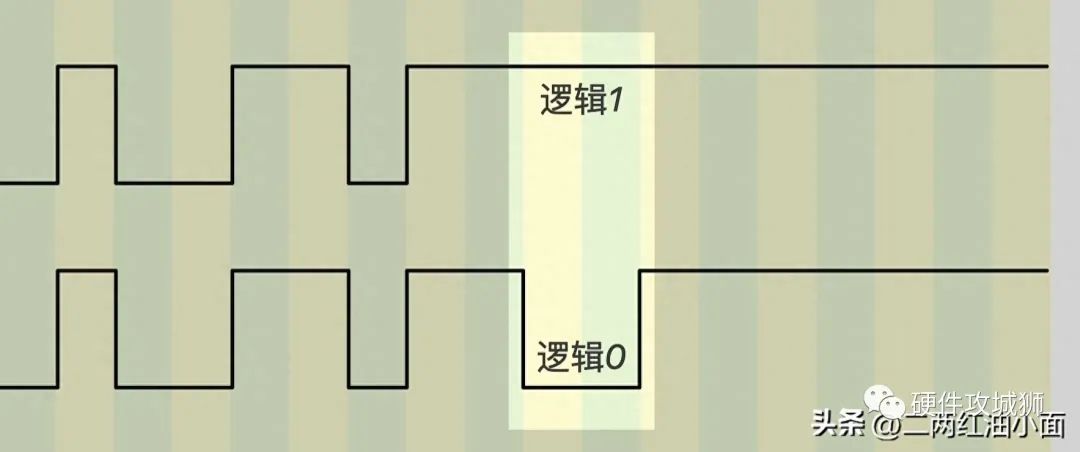
要想CAN通讯,就必须要专门的CAN收发器,经过CAN收发器,普通信号就会转化成差分信号(差分信号由两根线表示)
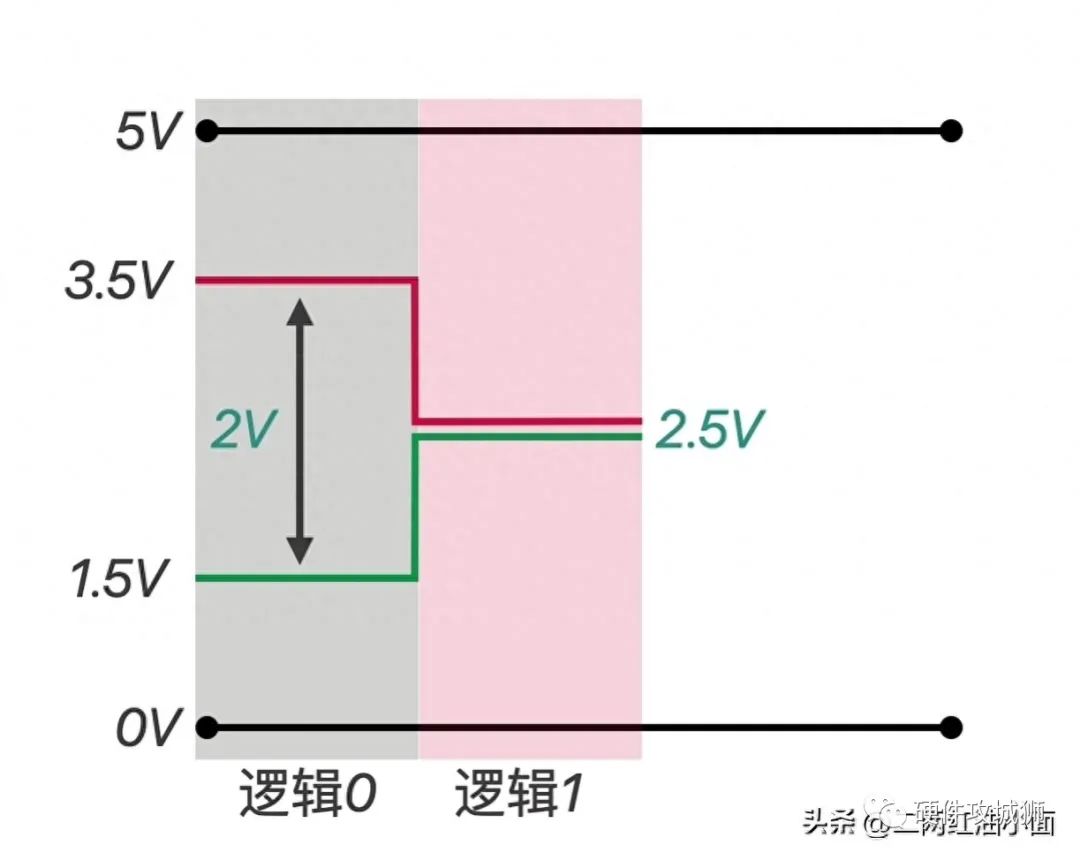
如果输入0,CAN收发器的两根线分别输出3.5V和1.5V(压差为2V)
如果输入1,CAN收发器的两根线都输出2.5V(压差为0V)
为什么要这样表示数据?
想象一下,如果这条线是0V,受到了干扰,电压就会波动
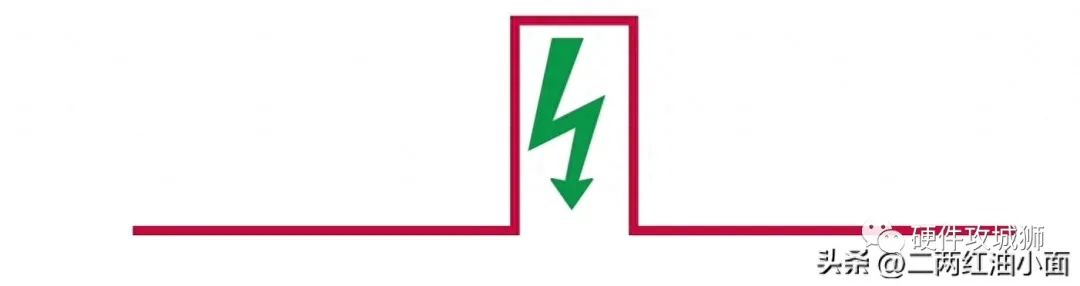
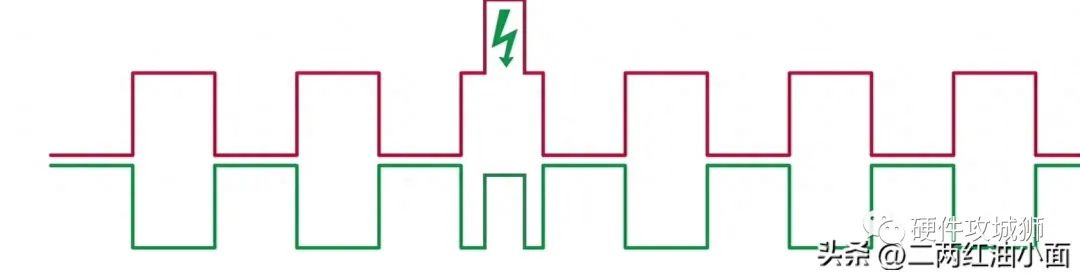
如果是两条线缠绕在一起,用差分信号来表示数据的话,即使受到了干扰,也是两条线一起受到干扰,依旧存在压差
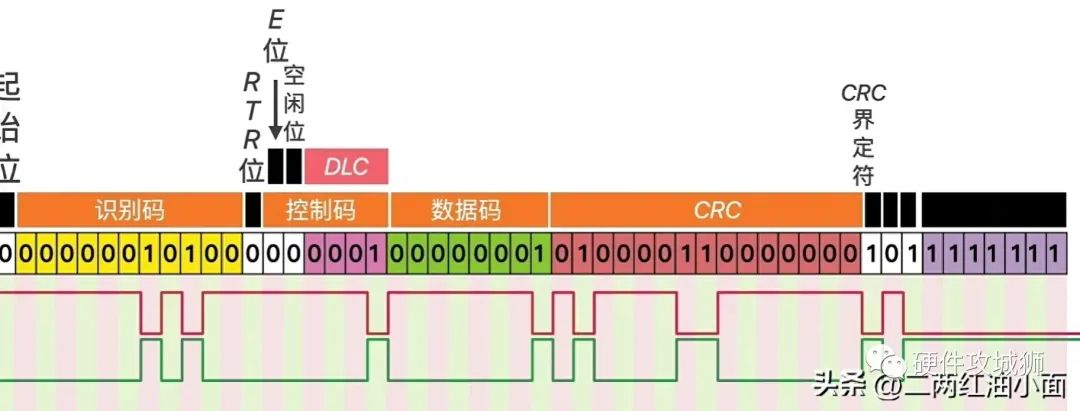
CAN数据格式
这是一帧完整的数据
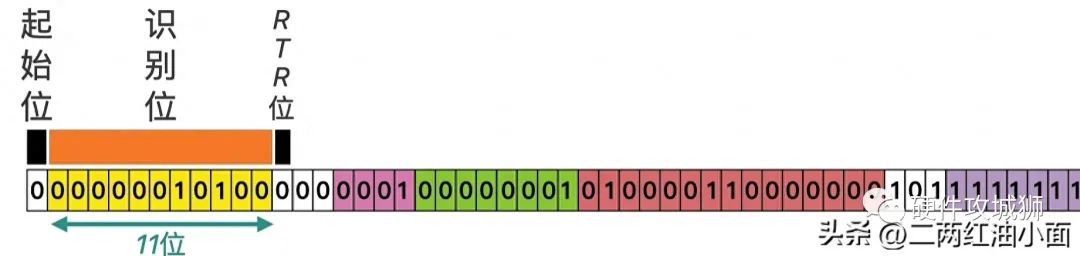
最开始是起始位(始终为0)
然后是11位的识别码
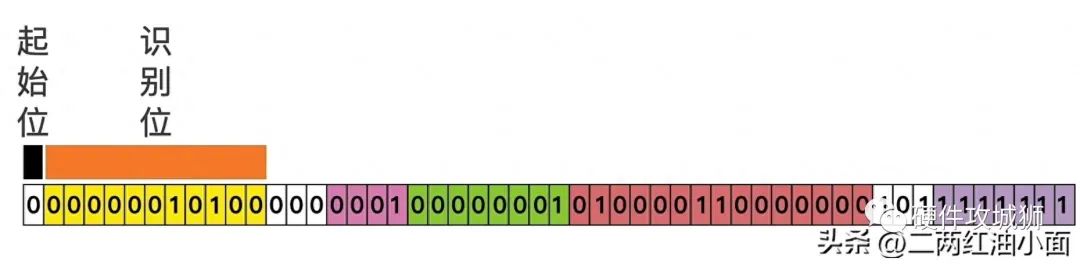
每一个设备都有唯一的11位识别码
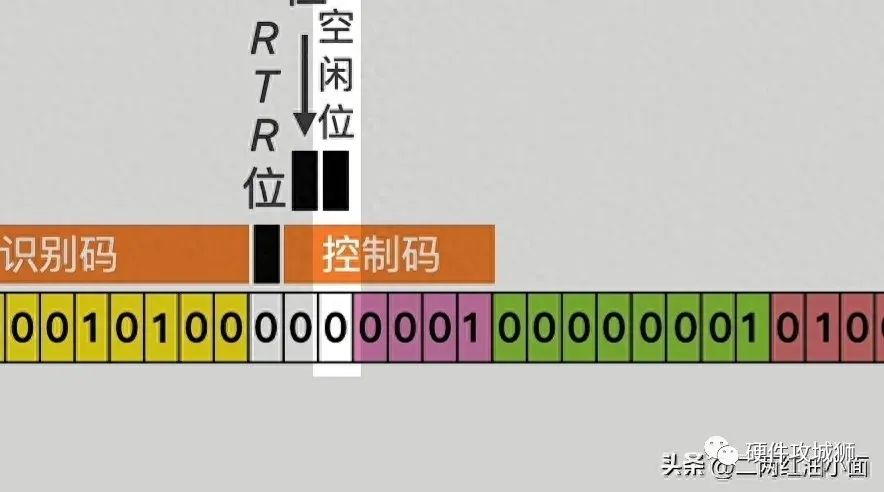
紧接着是RTR位用来区分数据帧(0)或远程请求帧(1)
接下来是6位控制码
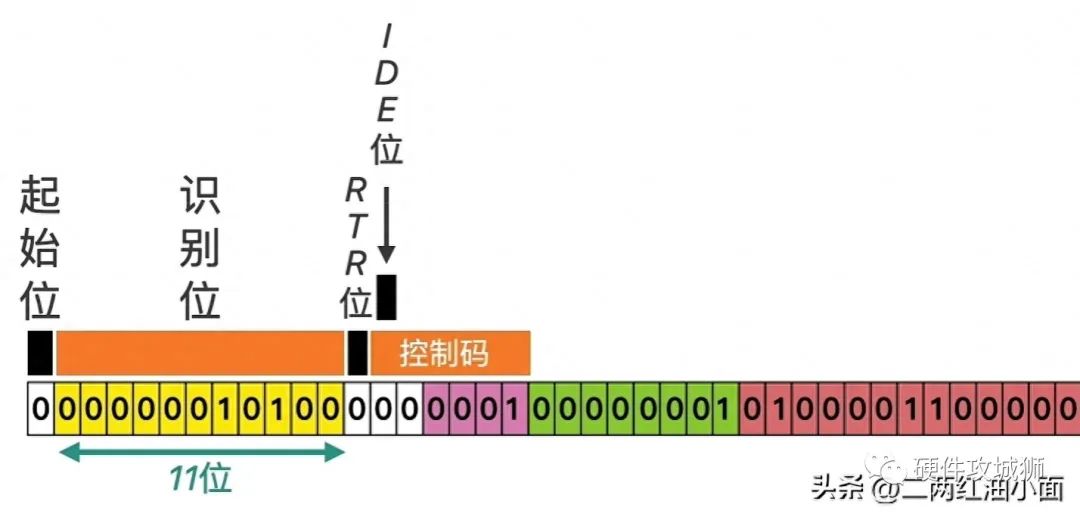
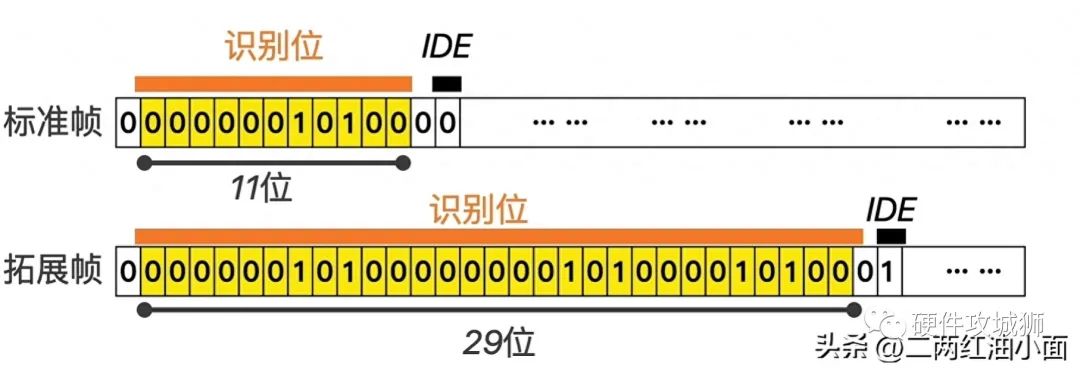
其中第一位的IDE位是用来区分是标准帧还是拓展帧(标准帧有11位的识别码,IDE位为0;而拓展码有29位的识别码,IDE位为1)
下面是预留位,它是逻辑0
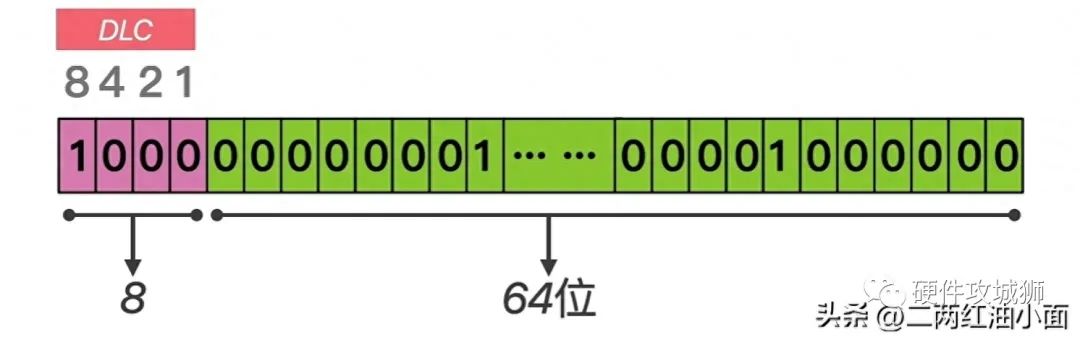
剩下的4位为DLC位,表示数据长度
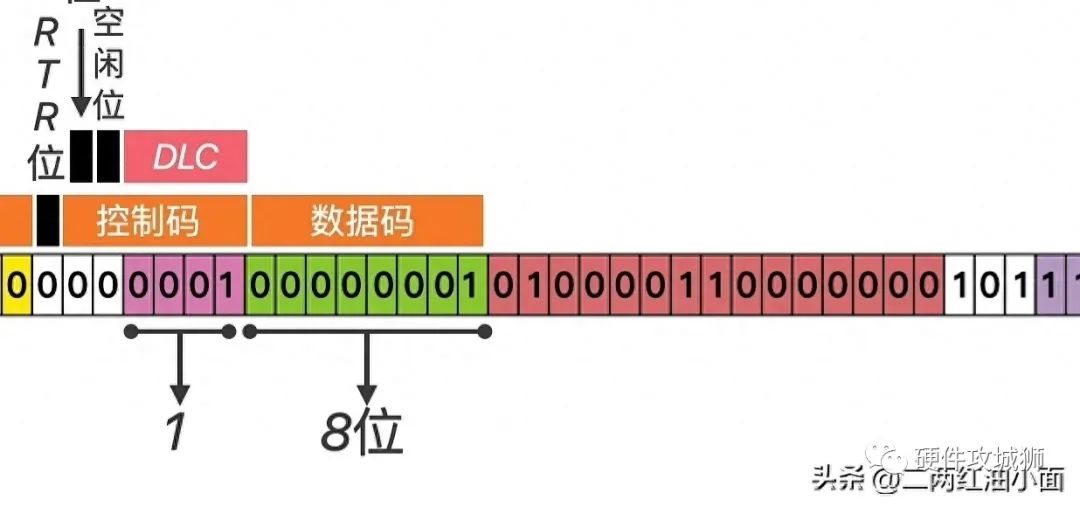
每一个数值对应每一个字节(比如如图数值为8,对应数据长度为8个字节)
接下来是16位的CRC循环冗余校验位,它是为了确保收到的数据的准确性
首先是15位CRC校验位,如果和接收到的CRC校验位不一致,就会重新再重发一次
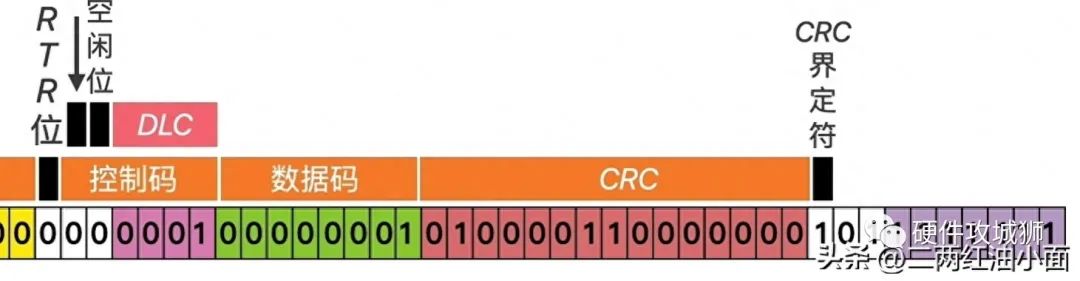
最后是CRC界定位,目的是为了与后面的数据区分开来
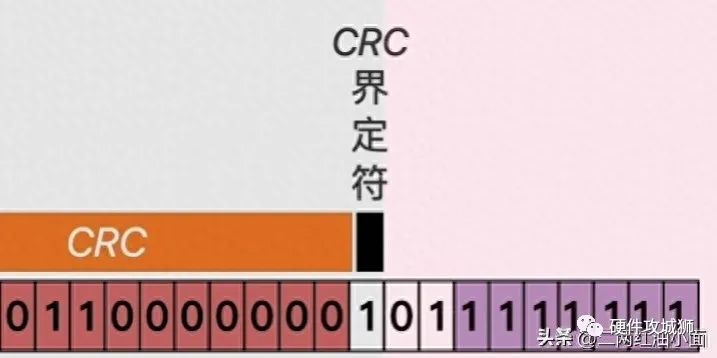
然后是2位ACK码
第一位是ACK确认槽(发送端是1,接收端就是0)用来表示应答
第2位是ACK界定位(始终为1),目的也是为了和后面的数据区分开来,
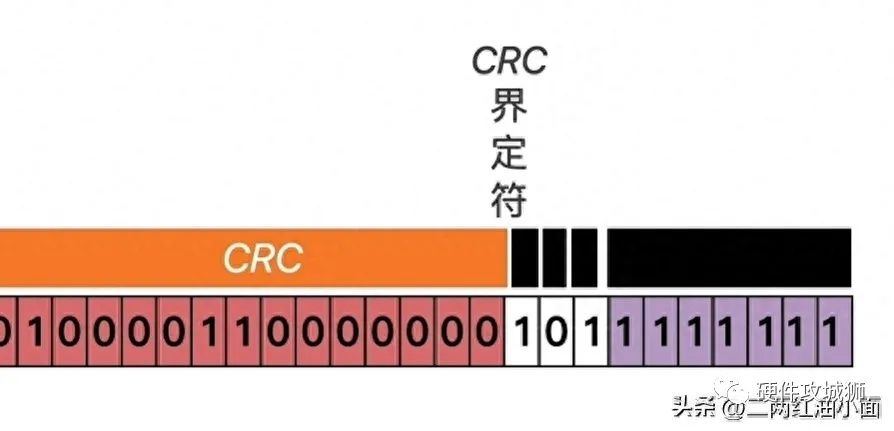
最后是7位结束位(时钟为1)
如果用用差分信号表示,电平是这样的,如图所示
如果此时总线上同时有2个设备发出控制信号,究竟优先执行哪一个设备的信号呢?
这就得看11位的识别码了,它不仅指定了哪个设备,还表示了优先级
当总线同时为1或0,总线会被置为0(即优先执行电平0)
总结
了解完了CAN总线,或许会有一个疑惑点?
CAN总线和RS485是不是有点相似,对吧?
虽然的确有些相似之处,但CAN总线是专门用于汽车领域的,就比如数据可靠性,CAN总线检测到数据不一致,就会重新发送,而485就发一次,不管是不是正确的数据
审核编辑:汤梓红
-
一文详解CAN总线应用及原理2023-06-25 4461
-
一文详解CAN总线技术2023-06-11 2777
-
详解CAN总线通信优先级机制2022-10-25 3796
-
浅谈CAN FD总线协议帧格式2022-10-14 4963
-
CAN总线详解 精选资料分享2021-08-20 2562
-
一文详解CAN总线的报文结构2020-11-02 12905
-
一文看懂CAN总线2018-06-13 366227
-
一文看懂汽车CAN总线技术原理2018-05-07 102389
-
汽车can总线工作原理及测量方法详解2018-04-25 151737
-
基于CAN总线的音乐喷泉控制系统_程道文2017-03-19 1193
-
基于CAN总线智能检测仪的设计_吴文珍2017-01-21 987
-
CAN总线通信详解2016-03-30 1405
-
CAN总线详解2016-03-22 810
-
CAN总线技术详解2016-01-20 13203
全部0条评论

快来发表一下你的评论吧 !
