

永磁同步电机的控制方式
工业控制
描述
来源:小牛机器人
早期对永磁同步电机的研究主要是对固定频率供电的永磁同步电机运行特性的研究,特别是稳态特性和直接启动性能的研究。永磁同步电机的直接启动是依靠阻尼绕组提供的异步转矩将电机加速到接近同步转速,然后由磁阻转矩和同步转矩将电机牵入同步来实现的。V.B.Honsinger和M.A.Rahman等人在这方面做了大量的研究工作。
20世纪80年代,国外开始对逆变器供电的永磁同步电机进行深入研究。逆变器供电的永磁同步电机与直接启动的永磁同步电机的结构基本相同,但在大多数情况下无阻尼绕组。
阻尼绕组有以下缺点:第一,阻尼绕组产生热量,使永磁材料温度上升;第二,阻尼绕组增大转动惯量,使电机力矩惯量比下降;第三,阻尼绕组的齿槽使电机脉动力矩增大。在逆变器供电情况下,永磁同步电机的原有特性将会受到影响,其稳态特性和暂态特性与恒定频率下的永磁同步电机相比有不同的特点。
1980年后科研人员发表了大量研究永磁同步电机的数学模型、稳态特性、动态特性的论文。A.V.Gumaste等研究了电压型逆变器供电的永磁同步电机稳态特性及电流型逆变器供电的永磁同步电机稳态特性。
随着人们对永磁同步电机调速系统性能要求的不断提高,需要设计出高效率、高力矩惯量比、高能量密度的永磁同步电机。随着微型计算机技术的发展,永磁同步电机矢量控制系统的全数字控制也取得了很大的进展。
D.Naunin等研制了一种永磁同步电机矢量控制系统,采用了16位单片机8097作为控制计算机,实现了高精度、高动态响应的全数字控制。20世纪80年代末至90年代初,B.K.Bose等发表了大量关于永磁同步电机矢量控制系统全数字控制的论文。
永磁同步电机矢量控制系统转速控制器大多采用比例积分(PI)控制。PI控制器具有结构简单、性能良好、对被控制对象参数变化不敏感等优点。
1991年,R.B.Sepe首次在转速控制器中采用自校正控制。早期自适应控制主要应用于直流电机调速系统。我国台湾大学刘天华等首次将鲁棒控制理论应用于永磁同步电机伺服驱动。
电机在运行过程中,模型和参数是不断变化的,参数和模型的变化将引起控制系统性能的降低。现代控制理论中的各种鲁棒控制技术能够使控制系统在模型和参数变化时保持良好的控制性能。因此,将各种鲁棒控制技术运用于电机调速领域,可以大大提高调速系统的性能。在这方面运用得较为成功的控制技术主要有自适应控制、变结构控制、参数辨识技术等。
永磁同步电机的控制
(1)开环控制方式
由于同步电机的转速会严格根据电源频率变化,因此可以通过变频器的V/F开环控制方式来控制同步电机的转速。在多台电机要求严格同步的场合,可以用一台变频器驱动多台永磁同步电机来实现多个轴之间的同步,有人称这种控制方式为外同步方式。由于是开环控制,同步电机的动态响应能力相对比较弱。
(2)闭环矢量控制方式
对于永磁同步电机的控制,目前市场上应用最多的是带有编码器反馈的闭环控制,控制思想采用了空间矢量分解的方式,将电机的实际电流按扭矩电流与励磁电流两个方向进行分解。同步电机闭环控制的难点是首先必须知道永磁转子的实际位置,然后控制定子绕组产生的旋转磁场,保证其与转子实际位置呈90°的空间夹角,以产生最大的电机扭矩。
通常情况下,转子的实际位置通过编码器回馈给驱动器,如采用增量式编码器,除了A、B、Z相的脉冲信号反馈转子的实际速度外,还有U、V、W信号,U、V、W信号与电机三相反电动势同频率、同相位,根据它们的不同状态,可将360°电角度平面分成6个部分,用以确定电机的初始转子位置角。
增量式正/余弦编码器除了速度信号,还提供了C、D通道,用来显示电机的初始转子位置。如果缺少了转子的位置信息,则驱动器不能建立正确的旋转磁场,会导致运行失败或者是电机的转矩波动较大。当然,很多高性能的驱动器还可以对电机转子实际位置进行识别。例如计算定子磁链矢量的空间位置来估计电机的转子位置、计算定子相电感来估计转子位置等。西门子Sinamics S120伺服驱动器给用户提供了以下几种转子位置的识别方式。
①基于运动模式。
②基于一阶饱和模式。
③基于二阶饱和模式。
④基于直流注入的模式,如下图所示。
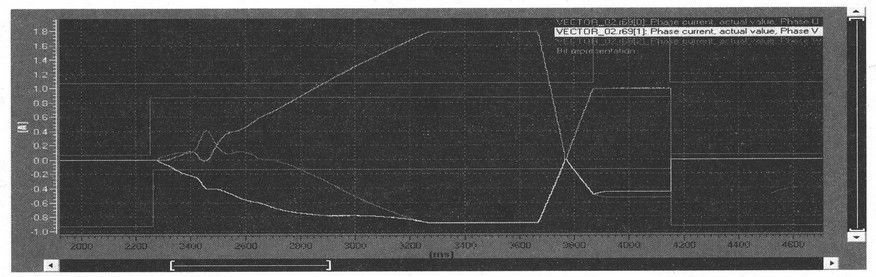
基于直流注入模式的磁极位置识别
(3)无传感器的矢量模式方式
安装传感器会给电机带来一定的麻烦与弊端,具体如下。
①机械传感器增加了电机转子轴上的转动惯量,加大了电机空间尺寸和体积。
②机械传感器的使用增加了电机与控制系统之间的连接线和接口电路,使系统易受干扰,降低了可靠性。
③受机械传感器使用条件如温度、湿度和震动的限制,调速系统不能广泛适应各种场合。
④机械传感器及其辅助电路增加了调速系统的成本,某些高精度传感器的价格甚至可与电机本身价格相比。
为了克服使用机械传感器给调速系统带来的缺陷,许多学者开展了无机械传感器交流调速系统的研究。无机械传感器交流调速系统是指利用电机绕组中的有关电信号,通过适当方法估计出转子的位置和速度,取代机械传感器,实现电机控制。
永磁同步电机无速度传感器矢量控制技术的关键,在于如何根据测量的电机电流和电压信号估计电机的转速和转子位置。对于永磁同步电机调速系统可以采用一些直观的方法,即利用其特殊的电磁特性,来构造速度和转子位置的估计方法。同时,现代控制、辨识技术的发展,为我们提供了许多可行的观测器构造方法来估计控制过程中的状态变量或参数。
在电机的无速度传感器矢量控制技术中,主要采用的观测器有全阶状态观测器、自适应观测器、变结构观测器、卡尔曼滤波器等。采用这些方法构造的电机转子位置和速度观测器具有动态性能好、稳定性强、参数敏感性小等特点。随着高速数字信号处理器(DSP)技术的发展,各种具有优良性能的速度观测器在无速度传感器矢量控制系统中得到广泛运用。
实践证明,无论是识别电机转子的实际位置,还是评估转子速度,目前的技术手段都还没有办法保证精准控制的需求,特别是在低频运行过程中,无传感器矢量控制电机的转矩波动大。
审核编辑:汤梓红
-
永磁同步电机的工作原理及控制方式2024-06-18 6840
-
永磁同步电机的控制方式2023-10-10 5568
-
永磁同步电机耐用吗 永磁同步电机寿命2023-03-16 11030
-
永磁同步电机控制笔记-22023-03-14 1138
-
永磁同步电机设计2023-03-06 2981
-
永磁同步电机控制解析合集2022-01-24 2568
-
永磁同步电机MTPA的控制原理是什么2021-09-27 3461
-
到底什么是永磁同步电机?如何去控制永磁同步电机的速度呢?2021-07-13 5306
-
永磁同步电机矢量控制原理2021-05-19 2427
-
单片机的永磁同步电机控制2018-01-30 1588
-
永磁同步电机控制系统2017-01-21 1758
-
永磁同步电机控制参数设计方法2017-01-05 1271
-
QEP控制的永磁同步电机2015-10-30 1230
全部0条评论

快来发表一下你的评论吧 !
