

探测和表征外行星的COSMOS
电子说
描述
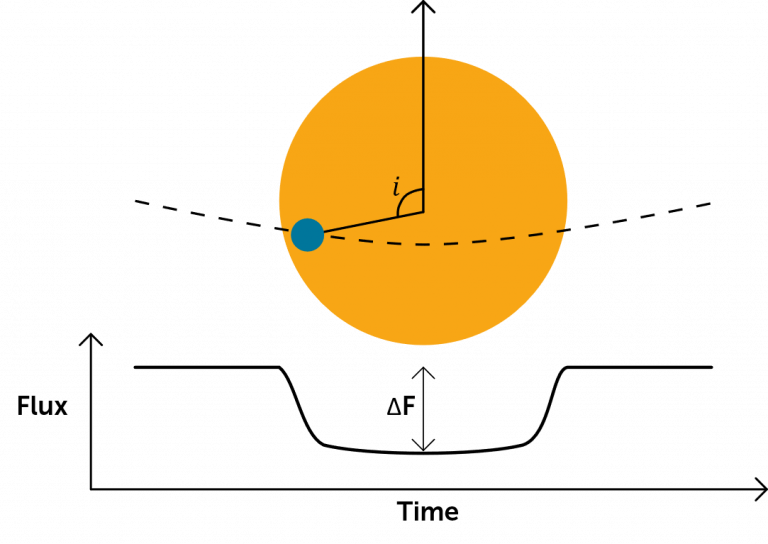
图1:显示一颗轨道运行的行星以典型的光曲线从恒星前面经过的示意图,轨道倾角由i表示。光曲线测量通量随时间的变化,通量递减(ΔF)表示行星的存在。
介绍
外行星是围绕太阳以外的恒星运行的行星,多年来,它们的探测和表征一直处于天文学的前沿。到目前为止,已经通过一系列不同的方法确认了4000多颗系外行星,还有5000多颗候选系外行星。在接下来的十年里,表征宜居系外行星将是天文学的关键研究领域之一,目标是寻找类地行星。尽管有多种探测方法,但凌日光度法和径向速度是系外行星探测/表征最常见的技术,每种方法分别发现71.3%和22.9%的系外行星。
凌日光度计
凌日光度法是一种间接方法,用于测量由轨道行星从恒星前方经过引起的恒星通量减少[2]。对恒星通量的测量会产生一条光曲线,当一颗行星从恒星前面经过时,它的一些光会被阻挡,这表明光曲线略有下降。图1显示了一颗系外行星凌日的示意图和产生的典型光线曲线(图仅为说明,曲线被夸大了)。
通过假设行星的通量可以忽略不计,并且恒星和行星都是球形的,光线曲线可以用来确定行星的相对大小、轨道倾角和轨道周期。只要有基于径向速度测量的轨道解决方案,凌日光度法也可以与轨道元件相结合(见下文)。在这种情况下,轨道的倾角可以用来确定行星的质量。结合质量和行星半径,我们得到了平均密度和表面重力。这些参数代表了行星表征的第一步,有助于区分气态巨星、冰行星和岩石行星[2]。
大气特征也可以通过凌日光度法来实现。通过使用不同的滤光器测量行星的凌日,光线曲线的变化可以表明某些分子的存在。例如,水分子吸收近红外光,因此如果它们存在于行星的大气层中,大气层对近红外波长将是不透明的。当使用近红外滤光器时,由于大气层的透明度较低,行星将阻挡更多的光线。这意味着,与光学波长相比,日食将更早开始,晚结束,产生一条最小值更深、更宽的光曲线。
然而,这种方法受到几何结构的限制,因为只有相对于地球从恒星前方经过的行星才能用这种方式进行研究。凌日光度法也存在误报,尽管测量了凌日行星的光曲线特征,但通量可能来自多恒星系统。假阳性的一个例子是与一颗明亮的双星在同一视线上的食双星。单个恒星的通量减少了由食双星引起的光曲线下降的视深度。由此产生的光线曲线在形状上类似于凌日行星[2]。为了确认凌日行星候选者不是假阳性,需要对系统进行径向速度测量。
径向速度
径向速度是另一种间接的技术,它测量恒星的光谱,以寻找可变的多普勒频移,表明行星在轨道上运行。恒星与行星的相互作用受引力控制,因此当恒星拉动行星时,行星也会拉动恒星,导致恒星以周期性运动运动,通常被称为“摆动”。通过测量恒星的光谱,任何朝向和远离地球的运动都将分别被观察为光谱的蓝移或红移,表明有一颗轨道行星。
通过这种方式,多普勒效应可以用来确定行星的轨道周期、轨道大小和轨道速度。后者可以提供轨道行星的最小质量。行星质量越大,速度振幅就越大。然而,为了确定行星的真实质量,需要凌日光度法,因为径向速度本身无法解释轨道的倾斜[3]。图2显示了恒星-行星相互作用的示意图,以及这如何影响恒星的光谱。
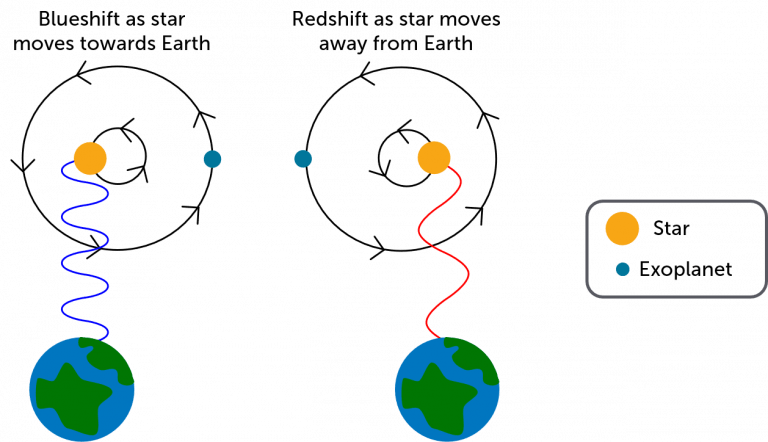
图2:系外行星的引力如何导致恒星圆周运动的示意图,当恒星分别向地球移动和远离地球时,会导致蓝移和红移。图像未按比例缩放。
由于径向速度测量轨道天体的相对质量,因此可以用来排除凌日光度法检测到的系外行星的任何误报。在食双星的情况下,预期的多普勒频移幅度很大,因为物体的质量相当。因此,每秒几百米或更高的球场中的径向速度变化将有力地区分双星和凌日行星,从而证实任何假阳性。
凌日光度法和径向速度都测量恒星通量随时间或波长的最微小变化。因此,这些技术在很大程度上依赖于先进的探测器技术来成功探测和表征系外行星。
摄像头要求
通过凌日光度法对系外行星的探测和表征依赖于对恒星通量微小变化的探测。这些通量的变化或下降通常小于恒星真实通量的1%。因此,高精度的相机对于测量通量的任何轻微下降都是至关重要的。此外,具有大动态范围和低噪声的相机进一步提高了识别系外行星的可能性,因为任何倾斜或光谱特征都可以与噪声水平区分开来。
凌日光度测量通常需要在行星穿过恒星前方时进行密集的观测。这些高帧率观测对于捕捉每次凌日的最大数据量和抵消恒星的不均匀性至关重要,特别是恒星边缘或行星在凌日过程中可能覆盖的活动区域(恒星斑点)。它还允许确定行星大小和倾角等参数。因此,具有高占空比(即,相对于曝光的最小读出)的相机对于实现这种高节奏成像至关重要。高精度、低噪声、大动态范围和高占空比的组合允许在保持高信噪比的同时进行密集的观测。
径向速度,虽然是一种光谱技术,但仍然需要先进的相机参数,如上述参数。边缘化(相机传感器内光子的干扰)对径向速度来说可能是非常有问题的,因为它会在任何测量光谱的顶部造成正弦调制。径向速度依赖于光谱的互相关,因此任何边缘伪影都会影响互相关的准确性,从而降低系外行星特征的准确性。
此外,在相机传感器上具有良好的电荷传输效率是重要的。如果留下了一些电荷,或者像素之间存在一些相关的噪声,这将影响相互关联,对系外行星的探测或表征产生负面影响。然而,这只是在使用CCD或EMCCD传感器时需要考虑的问题。
用于凌日探测和径向速度测量的COSMOS
COSMOS是Teledyne Princeton Instruments的大幅面背光高级CMOS相机,具有凌日测光和径向速度测量所需的许多相机质量。由于其背光传感器,COSMOS在可见光范围内具有>90%的峰值量子效率,如图3所示。因此,即使使用高阶成像,COSMOS也能够将高百分比的光子转换为光电子。COSMOS还可以实现低至0.7的电子读取噪声,使COSMOS适合于检测光线曲线中最轻微的下降。结合高量子效率,这种低读取噪声为最终的大格式CMOS灵敏度提供了高信噪比。
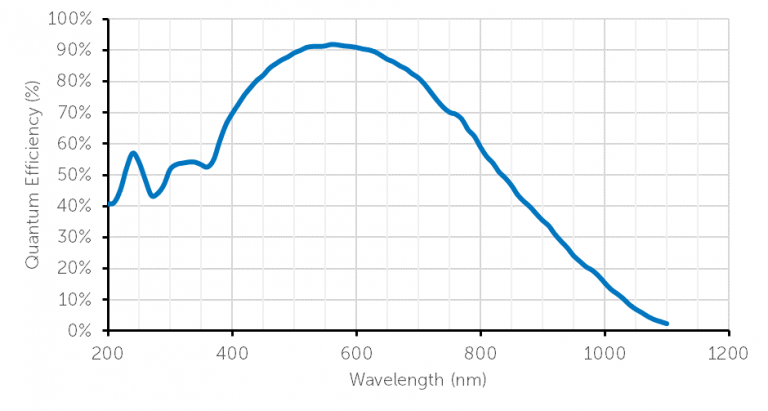
图3:COSMOS相机的量子效率曲线,显示了在可见光范围内的高量子效率和>90%的峰值量子效率。
大的动态范围在凌日光度法和径向速度中很重要,因为它允许确定轻微的波动。它还允许测量较暗的信号,而不会使来自周围较亮物体的探测器饱和。动态范围是一个取决于相机线性、模数转换器位深度和增益的参数。为了扩展动态范围,CMOS相机通常以高增益和低增益对信号进行多次采样。然而,这些高增益和低增益读数之间的交叉点可能会产生伪影,从而限制测量精度[4]。
先进的CMOS设计,如COSMOS中的设计,确保了两个ADC之间的精确交叉,以实现低噪声和高线性的操作。通过与更高比特深度的ADC相结合,该技术提供了无与伦比的动态范围。更多关于LACera大动态范围的详细信息™ COSMOS中使用的技术可以在我们的文章《高动态范围CMOS的新时代》中找到。
传统的全画幅CCD传感器依靠机械快门来阻挡读出过程中的任何入射光。打开和关闭机械快门是一个相对缓慢的过程,为高节奏成像引入了定量误差。机械快门的使用寿命也有限,在相机大量使用时经常需要更换。由于COSMOS是一种CMOS探测器,它利用了一个快速的电子快门,在读出之前,通过将检测到的光电子转移到帧存储区域来停止曝光。电子快门不仅比机械快门更精确,而且可以减少检测器的死区时间,在此期间相机不会暴露在光线下。这意味着,当信号从存储区域读出时,可以开始后续曝光,从而提供100%的占空比。这使得能够对测量系外行星的特征参数进行密集、高节奏的成像。
结论
外行星探测和表征将在未来十年成为天文学的前沿。凌日光度法和径向速度这两种互补技术已被用于发现累计94.2%的系外行星。凌日光度法是一种间接的方法,用于寻找由于行星在恒星前方穿行而导致的恒星亮度下降,而径向速度则用于寻找由于轨道行星的引力而导致的行星多普勒频移。
这两种技术都需要高精度,以及低噪声、大动态范围和高灵敏度的相机。凌日测光还需要一台高占空比的相机,因为在潜在行星穿过恒星表面时,通常会使用以高节奏拍摄的密集帧来对其进行成像。径向速度,一种光谱技术,可能会受到边缘的极大阻碍,因此需要一台边缘尽可能小的相机。
COSMOS具有>90%的峰值量子效率、0.7 e-的低读取噪声和大动态范围,满足凌日光度和径向速度的最低相机要求。此外,CMOS传感器架构和电子快门使100%的占空比成为可能,从而实现了系外行星探测和表征的高节奏成像。这使得COSMOS对于凌日光度法和径向速度法来说是不错的。
审核编辑 黄宇
-
新机器学习算法确认50颗系外行星2020-08-27 2008
-
NEID的新仪器专利科学家测量遥远行星密度2020-01-11 2171
-
NASA发现或适合人类居住的系外行星2020-01-09 2389
-
NASA的下一旗舰项目?或许是宜居系外行星天文台2019-12-23 2397
-
NASA科学家欲建造折叠天文望远镜,探索新系外行星2019-12-18 3016
-
为扩增对太阳系外行星的探索,NASA发射价值3.37亿美元和洗衣机差不多大小的太空探测器2018-08-09 1232
全部0条评论

快来发表一下你的评论吧 !
