

异步电机直接转矩控制学习笔记
工业控制
描述
导读:本期文章对异步电机直接转矩控制进行梳理学习。DTC包括转速外环、磁链观测器、滞环和电压矢量离线开关表。离线电压矢量开关表分为两种:添加零矢量和未添加零矢量。
一、引言
不同于矢量控制技术,DTC利用Bang-Bang控制(滞环控制)产生PWM信号,对逆变器的开关状态进行最佳控制,从而获得转矩的高动态性能。DTC具有自己的特点,它在很大程度上解决了矢量控制中存在的一些问题,如计算的复杂特性,易受电动机参数变化的影响,实际性能难以达到理论分析结果等。DTC摒弃了传统矢量控制中的解耦思想,而是将转子磁通定向更换为定子磁通定向,取消了旋转坐标变换,减弱了系统对电机参数的依赖性,通过实时检测电机定子电压和电流,计算转矩和磁链的幅值,并分别与转矩和磁链的给定值比较,利用所得差值来控制定子磁链的幅值及该矢量相对于磁链的夹角,由转矩和磁链调节器直接输出所需的空间电压矢量,从而达到磁链和转矩直接控制的目的。
二、直接转矩控制(两电平6扇区)
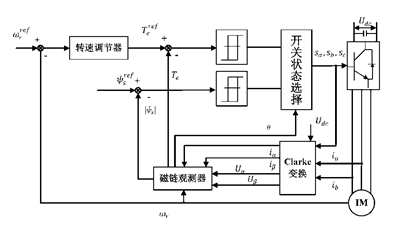
图2-1 异步电机直接转矩控制框图
在电动机实际运行中,保持定子磁链幅值为额定值,以便充分利用电动机铁心;转子磁链幅值由负载决定。通过控制定子磁链与转子磁链之间的夹角即转矩角可以控制电动机的转矩。在直接转矩控制中,其基本控制方法就是通过选择电压空间矢量来控制定子磁链的旋转速度,控制定子磁链走走停停,以改变定子磁链的平均旋转速度的大小,从而改变转矩角的大小,以达到控制电动机转矩的目的。
直接转矩控制采用两个滞环比较控制器,分别比较定子给定磁链和实际磁链、给定转矩和实际转矩的差值,然后,根据这两个差值查询逆变器电压矢量开关表得到需要加在异步电动机上的恰当的电压开关矢量,最后通过PWM逆变器来实现对异步电动机的控制。整个控制框图如图(2-1)所示。
三、开关表的确定
DTC基于定子磁链的位置信号以及转矩与磁链幅值的误差信号直接离线查找矢量表,得到最优电压矢量。
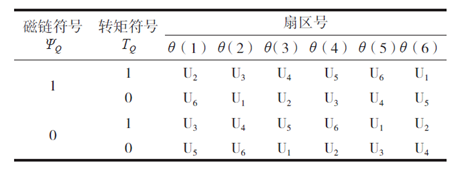
图3-1 电压矢量开关表(未加入零矢量)
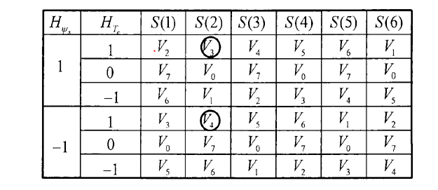
图3-2 电压矢量开关表(加入零矢量)
四、仿真系统搭建
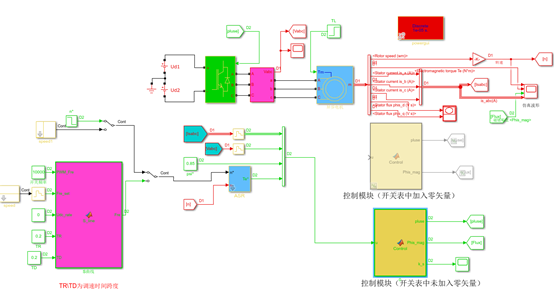
图4-1 异步电机直接转矩控制系统仿真(两电平6扇区)
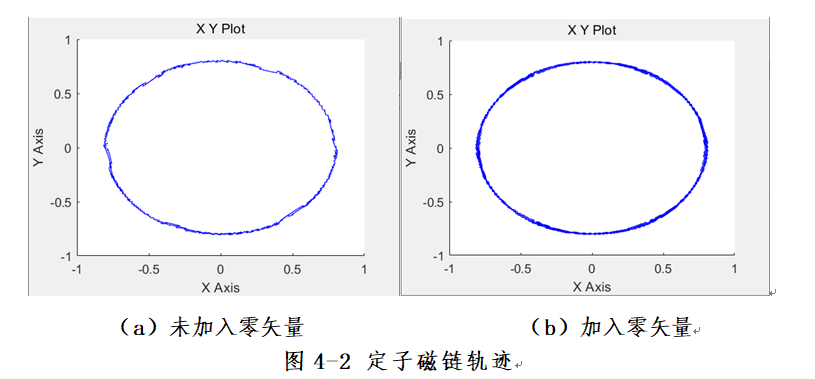
(a)未加入零矢量
(b)加入零矢量
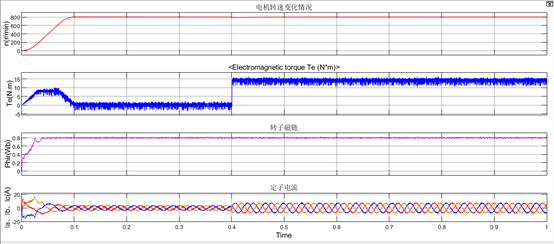
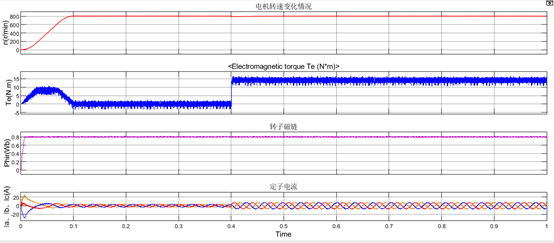
图4-3 异步电机直接转矩控制系统仿真波形变化情况(800r/min)
对比图 (4-2)和(4-3),可以得到以下结论:1)零矢量的加入,影响定子磁链;2)零矢量的加入使得转速超调更小;3)加入零矢量的DTC相比于传统的DTC,转矩波动明显减小。
五、总结
直接转矩控制由于其快速响应特性,广泛应用于异步电机控制领域,然而,传统的直接转矩控制存在转矩波动等问题,影响了其控制性能。利用零矢量具有保持转矩的特性,将其加入到异步电机转矩控制当中,仿真结果表明,零矢量的加入能够有效减小转矩波动。
-
异步电机直接转矩控制simulink仿真2023-03-29 982
-
基于SVM改进的异步电机直接转矩控制系统设计2022-10-14 1876
-
异步电机直接转矩控制simulink仿真教程2021-09-06 1698
-
异步电机无速度传感器直接转矩控制系统2017-01-21 1418
-
异步电机无速度传感器直接转矩控制系统研究2016-05-04 862
-
基于模糊控制器的异步电机直接转矩控制2011-11-14 1693
-
异步电机直接转矩弱磁控制研究2011-06-13 1358
-
基于模糊DSVM控制策略的异步电机直接转矩控制2009-11-18 711
-
基于DSP的新型异步电机直接转矩控制系统2009-10-15 632
全部0条评论

快来发表一下你的评论吧 !
