

PID刚入门?新手必看的15个PID基本概念!
描述
PID调节系统PID功能由PID调节器或DCS系统内部功能程序模块实现,了解与PID调节相关的一些基本概念,有助于PID入门新手快速熟悉调节器应用,在自动调节系统中成功整定PID参数。
本文介绍必须熟透于心的15个PID基本概念。
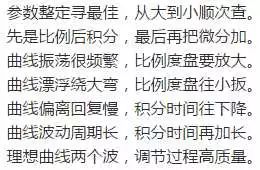
先读一首PID打油诗

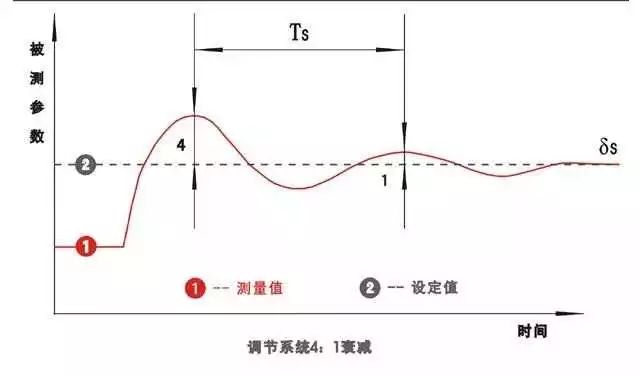
1、被调量
被调量就是反映被调对象的实际波动的量值。被调量是经常变化的。
2、设定值
PID调节器设定值就是人们期待被调量需要达到的值。设定值可以是固定的,也可以是变化的。
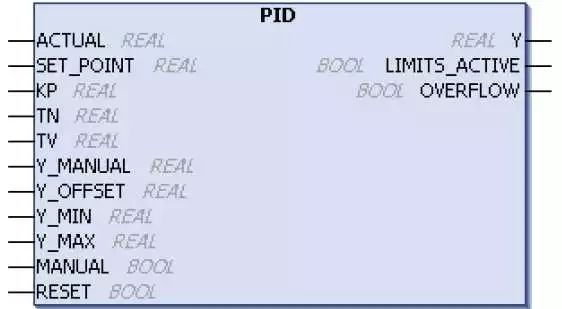
3、控制输出
控制输出指PID调节器根据被调量的变化情况运算之后发出的让外部执行结构按照它的要求动作的指令。在PID调节器和执行机构之间还会有其他环节,比如限幅、伺服放大器等。限幅功能通常在PID调节器内完成;如果如果将PID、限幅和伺服放大器功能做在一台仪表内就构成阀位控制PID调节器;将伺服放大器和限幅做在执行机构里就构成智能执行机构。
4、输入偏差
输入偏差时被调量和设定值之间的差值
5、P(比例)
P就是比例作用,简单说就是输入偏差乘以一个系数。
6、I(积分)
I就是积分,简单说就是将输入偏差进行积分运算。
7、D(微分)
D就是微分,简单说就是将输入偏差进行微分运算
8、PID基本公式
PID调节器参数整定过程通俗讲就是先把系统调为纯比例作用,逐步增强比例作用让系统振荡,记录下比例作用和振荡周期,然后这个比例作用乘以0.6,积分作用适当延长。
KP=0.6Km
KD=KP×π/4ω
KI=KP×ω/π
公式中KP为比例控制参数;KD为积分控制参数;KI为微分控制参数;Km为系统开始振荡是的比例值;ω为极坐标下振荡时的频率
9、单回路
单回路就是只有一个PID的调节系统。
10、串级
一个PID不够用,串级就是把两个PID串接起来形成一个串级调节系统,也被成为双回路调节系统。串级调节系统里PID调节器有主调和副调之分。
在串级调节系统中要调节被调量的PID叫做主调,输出直接去指挥执行器动作的PID叫做副调,主调的控制输出进入副调作为副调的设定值。主调选用单回路PID调节器,副调选用外给定调节器。
11、正作用
对于PID调节器而言,控制输出随被调量增高而增高,随被调量减少而减少的作用,叫做PID正作用。
12、反作用
对于PID调节器而言,控制输出随被调量增高而降低,随被调量减少而增高的作用,叫做PID反作用。
13、动态偏差
在调节过程中,被调量和设定值之间的偏差随时改变,任意时刻两者之间的偏差叫做动态偏差。
14、静态偏差
调节趋于稳定之后,被调量和设定值之间还存在的偏差交静态偏差。消除静态偏差是通过PID调节器积分作用来实现的。
15、回调
调节器调节作用显示,使被调量开始由上升变为下降,或者由下降变为上升趋势成为回调。
部分内容来源于网络,版权归原作者所有。如涉及版权或对版权有所疑问,请第一时间与我们联系,感谢。

加入粉丝交流群
张飞实战电子为公众号的各位粉丝,开通了专属学习交流群,想要加群学习讨论/领取文档资料的同学都可以扫描图中运营二维码一键加入哦~
(广告、同行勿入
原文标题:PID刚入门?新手必看的15个PID基本概念!
文章出处:【微信公众号:张飞实战电子】欢迎添加关注!文章转载请注明出处。
-
Java新手入门的30个基本概念2012-08-16 3196
-
写给新手:如何写一个标准的PID算法2015-06-05 102318
-
第15章 ControllerFunctions的使用(PID控制)2016-09-24 4745
-
新手入门必看!2020-08-27 5364
-
标准的PID处理例程(PID通俗易懂的讲解)[2]2016-05-06 721
-
PID简单教程2016-06-14 1060
-
工业控制PID系统的参数介绍2017-09-19 1022
-
基于由入门到精通吃透PID2017-10-15 1083
-
新手Qt_CreatoR_入门第一必看2017-10-30 1185
-
基于PID调节相关的15个基本概念详解2018-01-08 7499
-
关于工业控制PID系统中的十五个基本概念2019-11-13 2606
-
必看的15个PID基本概念!2020-05-30 6827
-
PID:智能小车入门(位置式和增量式)2022-01-14 4705
-
如何使用PID控制算法优化控制系统2023-08-29 5799
-
工程师必看!电路基本概念有哪些?2023-11-30 3282
全部0条评论

快来发表一下你的评论吧 !
