

一种全新磁控机器人设计制造技术研究
机器人
554人已加入
描述
近期,北京航空航天大学陈华伟教授课题组报道了一种全新磁控机器人设计制造技术,针对磁控机器人的原位运动编程和位姿感知需求,通过4D喷涂打印制备一种新的碳-磁薄膜多层材料,实现电热磁化和电阻应变传感的功能耦合,达到多模态驱动和位姿感知一体化(图1)。相关成果以 ” A Magnetic-Driven Multi-Motion Robot with Position/Orientation Sensing Capability” 为题发表在Research。
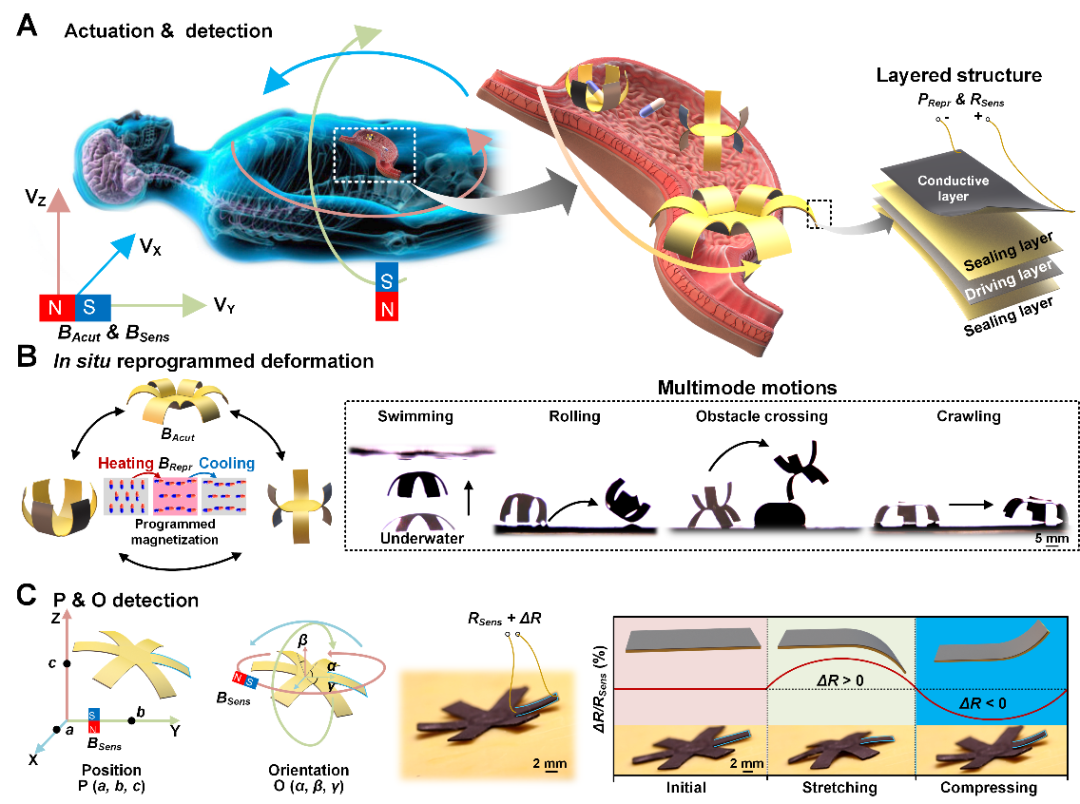
图1 具有多模运动和位置姿态传感能力的磁控动机器人 通过原位重编程,机器人的多模式运动提升了对复杂运动和操作需求的适应性。结合机器人的位姿感知能力,可以在非可视的胃肠道环境中仍然可以达到准确重编程和操作效果,有助于实现复杂的药物递送和释放、组织检测功能。本研究为开发精确、多功能的胃肠道医疗磁驱机器人提供了新思路(图2)。
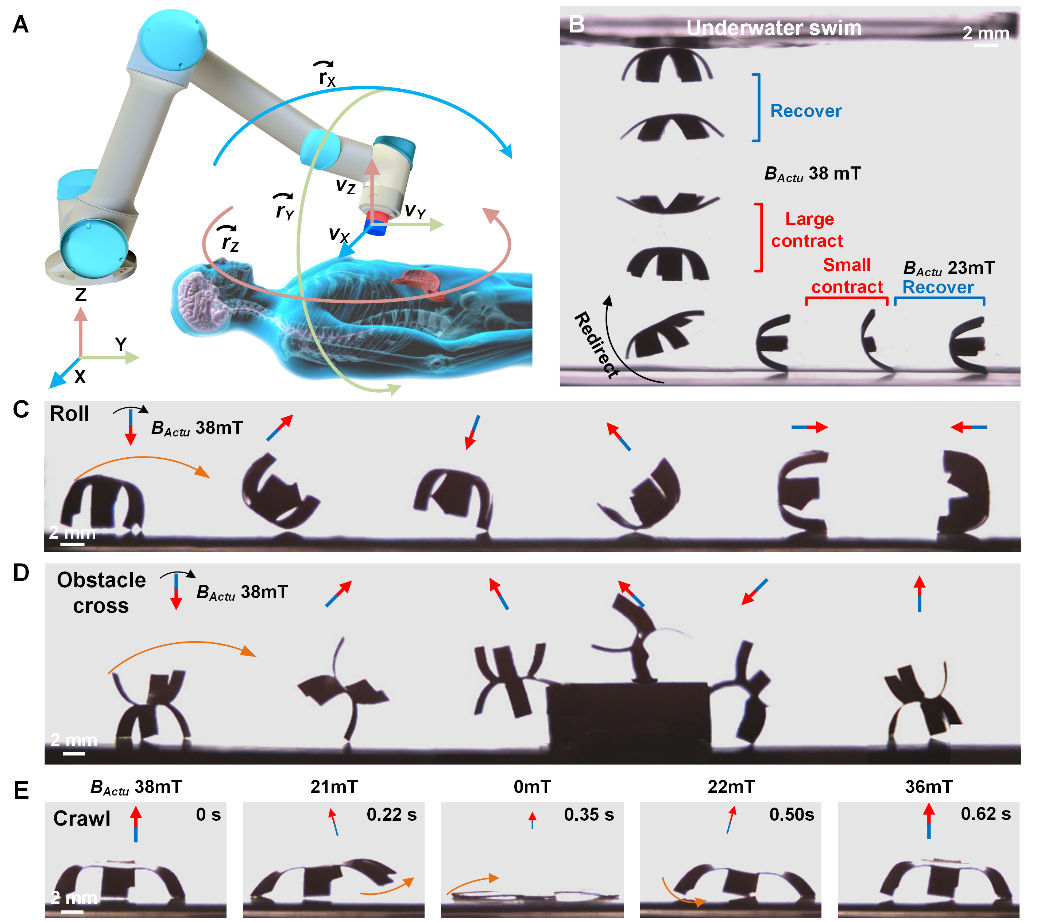
图2 机器人多模态运动 编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
《机器人设计与实现》——低成本DIY机器人,一本机器人制作的经典入门书2017-08-01 195409
-
[分享]LabVIEW 与机器人设计2009-05-30 9263
-
一种小型移动机器人的控制系统研究2012-08-20 3366
-
什么是工业机器人2015-01-19 6815
-
智能家庭扫地机器人设计原理研究与分析电子书下载2018-06-30 12057
-
利用LabVIEW设计用于研究飞虫的机器人设备2019-04-30 2224
-
如何应对机器人设计开发中的挑战?2019-07-31 2410
-
辅助行走的老人智能搀扶机器人设计2020-10-12 5355
-
如何去实现一种气动爬行机器人设计2022-01-13 1672
-
设计一种可用于大学和学校教授机器人技术的机器人2022-07-25 1938
-
一种嵌入式智能寻迹机器人设计2009-12-25 883
-
传感技术简化机器人设计制造过程2016-05-09 516
-
MIT开发出一种为软体机器人设计的新型模拟器2019-07-10 2091
-
研究人员已成功研发出一种新型的磁驱动高速软体机器人2020-09-27 2819
-
研究人员开发了一种新型的磁力驱动高速软件机器人2020-10-10 3700
全部0条评论

快来发表一下你的评论吧 !
