

梁山派GD32F450/470-RT-Thread Nano移植(三)
电子说
描述
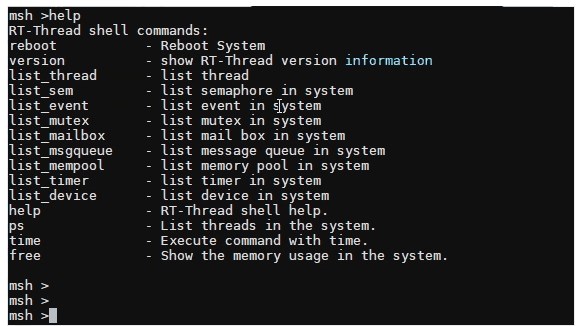
下面是FinSH组件的简介
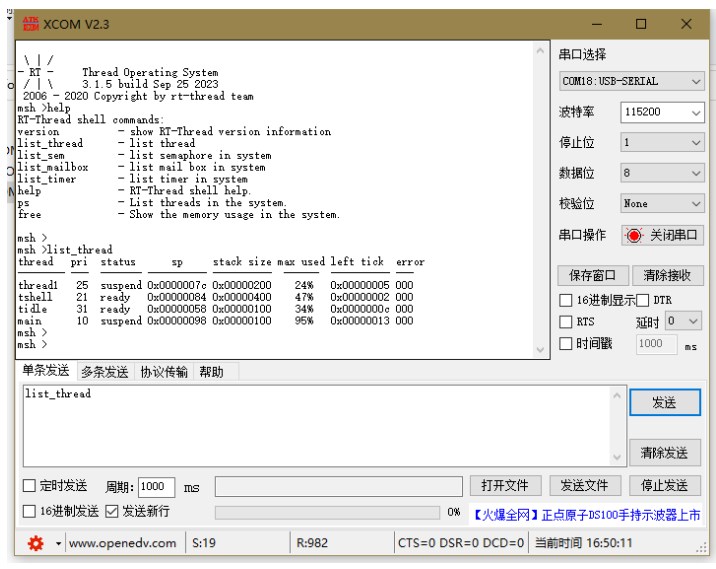
RT-Thread FinSH 是 RT-Thread 的命令行组件(shell),提供一套供用户在命令行调用的操作接口,主要用于调试或查看系统信息。它可以使用串口 / 以太网 / USB 等与 PC 机进行通信,使用 FinSH 组件基本命令的效果图如下所示:
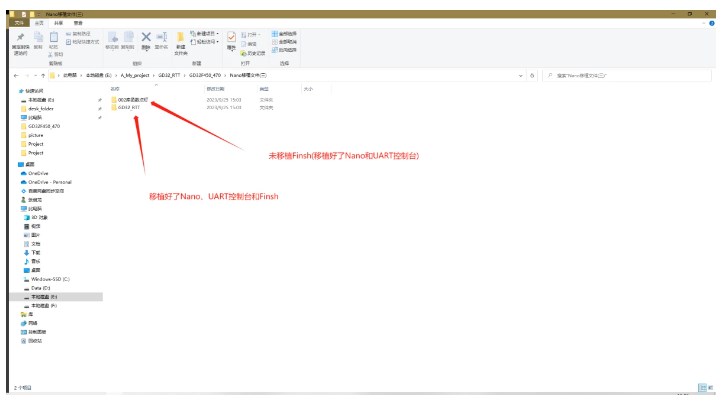
老规矩,先给文件
文件信息如下
移植步骤如下:
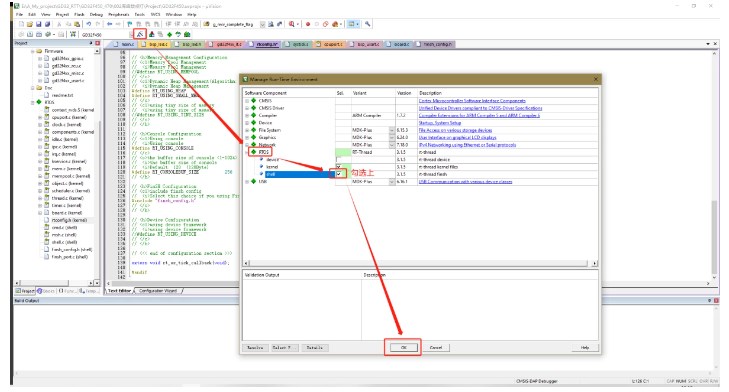
1、在keil中添加FinSH源码
打开未移植FinSH的keil工程,按图中将shell勾选上,这会把FinSH组件的源码添加到工程中
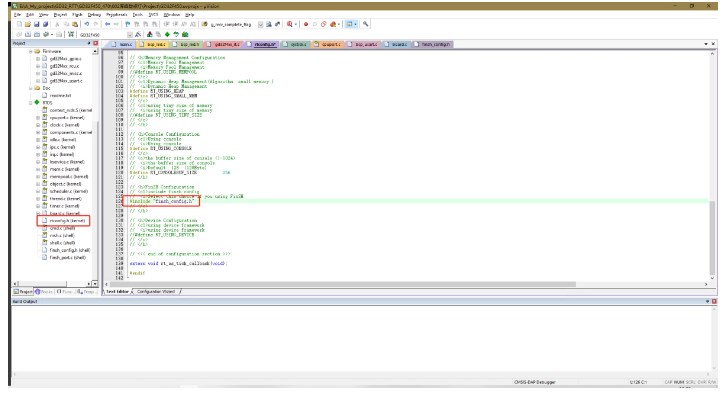
然后在rtconfig.h中将#include “finsh_config.h”的注释释放掉,如下图所示
2、ringbuffer实现部分
这一部分我也不是很明白,不过也不需要太明白,官方有示例,直接复制过来即可,这个不会因为芯片不同而产生区别,只把它当作一个缓冲区就可以了
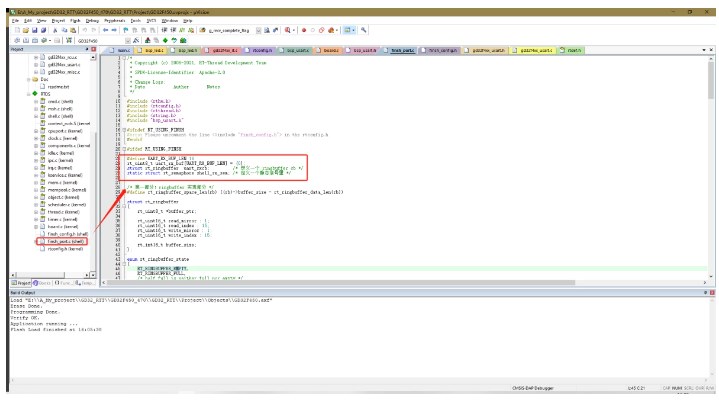
移植代码直接粘贴到finsh_port.c文件中即可
代码如下:
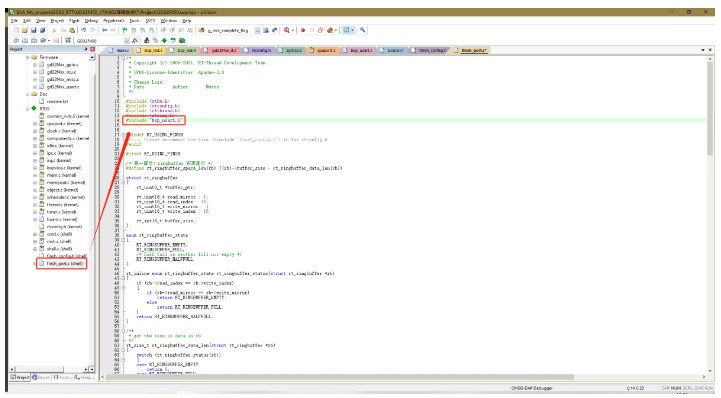
/* 第一部分:ringbuffer 实现部分 */
#include
#include
#define rt_ringbuffer_space_len(rb) ((rb)->buffer_size - rt_ringbuffer_data_len(rb))
struct rt_ringbuffer
{
rt_uint8_t buffer_ptr;
rt_uint16_t read_mirror : 1;
rt_uint16_t read_index : 15;
rt_uint16_t write_mirror : 1;
rt_uint16_t write_index : 15;
rt_int16_t buffer_size;
};
enum rt_ringbuffer_state
{
RT_RINGBUFFER_EMPTY,
RT_RINGBUFFER_FULL,
/ half full is neither full nor empty /
RT_RINGBUFFER_HALFFULL,
};
rt_inline enum rt_ringbuffer_state rt_ringbuffer_status(struct rt_ringbuffer rb)
{
if (rb->read_index == rb->write_index)
{
if (rb->read_mirror == rb->write_mirror)
return RT_RINGBUFFER_EMPTY;
else
return RT_RINGBUFFER_FULL;
}
return RT_RINGBUFFER_HALFFULL;
}
/
get the size of data in rb
*/
rt_size_t rt_ringbuffer_data_len(struct rt_ringbuffer *rb)
{
switch (rt_ringbuffer_status(rb))
{
case RT_RINGBUFFER_EMPTY:
return 0;
case RT_RINGBUFFER_FULL:
return rb->buffer_size;
case RT_RINGBUFFER_HALFFULL:
default:
if (rb->write_index > rb->read_index)
return rb->write_index - rb->read_index;
else
return rb->buffer_size - (rb->read_index - rb->write_index);
};
}
void rt_ringbuffer_init(struct rt_ringbuffer rb,
rt_uint8_t pool,
rt_int16_t size)
{
RT_ASSERT(rb != RT_NULL);
RT_ASSERT(size > 0);
/ initialize read and write index /
rb->read_mirror = rb->read_index = 0;
rb->write_mirror = rb->write_index = 0;
/ set buffer pool and size /
rb->buffer_ptr = pool;
rb->buffer_size = RT_ALIGN_DOWN(size, RT_ALIGN_SIZE);
}
/
put a character into ring buffer
/
rt_size_t rt_ringbuffer_putchar(struct rt_ringbuffer rb, const rt_uint8_t ch)
{
RT_ASSERT(rb != RT_NULL);
/ whether has enough space /
if (!rt_ringbuffer_space_len(rb))
return 0;
rb->buffer_ptr[rb->write_index] = ch;
/ flip mirror /
if (rb->write_index == rb->buffer_size-1)
{
rb->write_mirror = ~rb->write_mirror;
rb->write_index = 0;
}
else
{
rb->write_index++;
}
return 1;
}
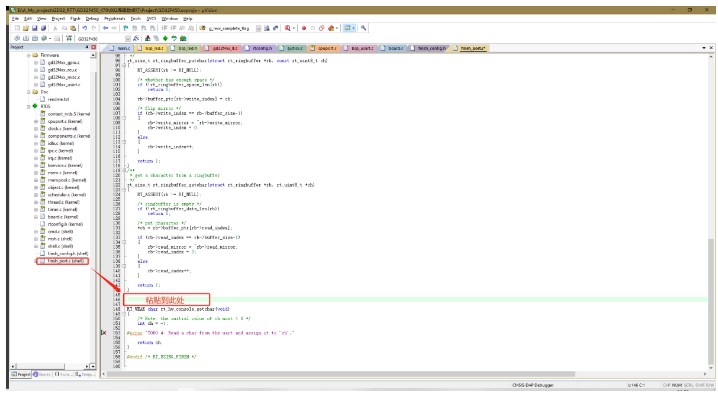
/
get a character from a ringbuffer
*/
rt_size_t rt_ringbuffer_getchar(struct rt_ringbuffer *rb, rt_uint8_t ch)
{
RT_ASSERT(rb != RT_NULL);
/ ringbuffer is empty /
if (!rt_ringbuffer_data_len(rb))
return 0;
/ put character */
*ch = rb->buffer_ptr[rb->read_index];
if (rb->read_index == rb->buffer_size-1)
{
rb->read_mirror = ~rb->read_mirror;
rb->read_index = 0;
}
else
{
rb->read_index++;
}
return 1;
}
3、finsh 移植对接部分
在这一部分我们开始对接finSH组件,对接finSH组件的一个大致流程如下:
当有数据通过串口输入时,进入串口中断,在中断服务函数中将数据存入ringbuffer缓冲区,等数据传输完毕,会触发另一个串口中断并进入中断服务函数,告诉finSH组件数据接收完毕,然后finSH组件开始读取ringbuffer缓冲区中的数据
下面是该部分的移植
3.1 初始化串口中断
在前两篇中,我们已经做好了串口初始化,所以我们在这里直接剪切过来即可,将写图中代码剪切
粘贴到下图中的位置
在finsh_port.c文件中引入串口的头文件,如图所示
#include "bsp_usart.h"
然后我们定义几个需要用到的变量
UART_RX_BUF_LEN是串口接收数据长度宏定义
uart_rx_buf是串口接收缓冲区
uart_rxcb是ringbuffer cb(这个不是很懂,个人理解是用来管理串口接收缓冲区的)
shell_rx_sem是信号量,当串口接收完成后中断函数会释放信号量,而finSH组件会接收该信号量,然后读取接收到的数据
#define UART_RX_BUF_LEN 16
rt_uint8_t uart_rx_buf[UART_RX_BUF_LEN] = {0};
struct rt_ringbuffer uart_rxcb; /* 定义一个 ringbuffer cb /
static struct rt_semaphore shell_rx_sem; / 定义一个静态信号量 */
将他们放到下图中的位置
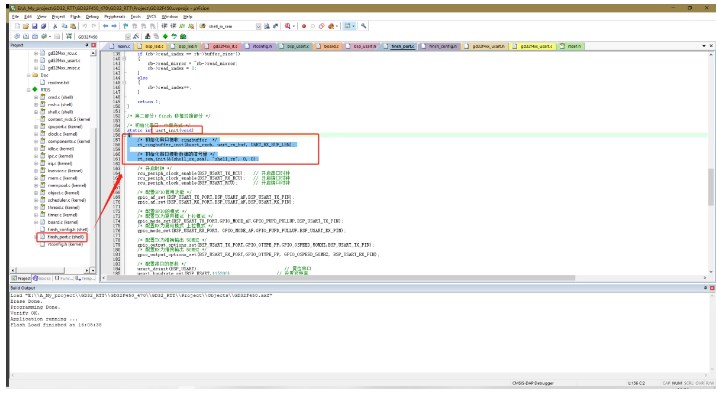
在串口初始化函数中初始化ringbuffer cb变量uart_rxcb和信号量shell_rx_sem
/* 初始化串口接收 ringbuffer */
rt_ringbuffer_init(&uart_rxcb, uart_rx_buf, UART_RX_BUF_LEN);
/* 初始化串口接收数据的信号量 */
rt_sem_init(&(shell_rx_sem), "shell_rx", 0, 0);
将他们放到下图中的位置
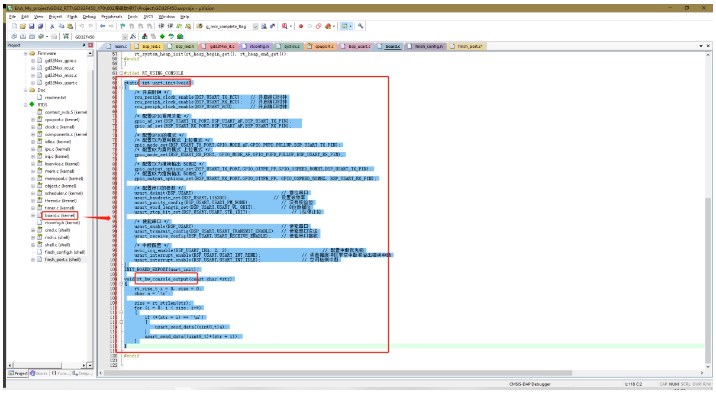
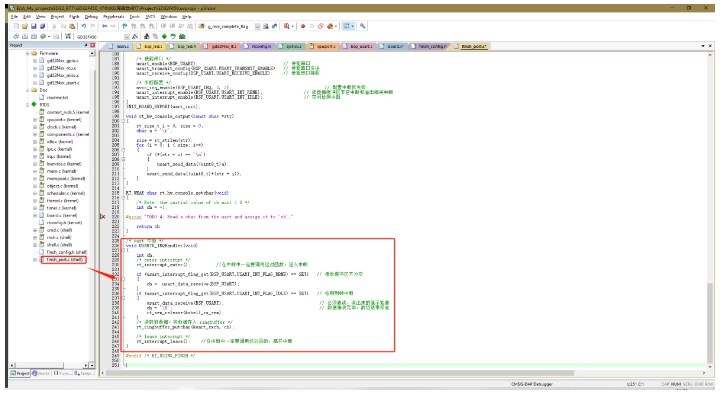
编写串口中断服务函数
/* uart 中断 /
void USART0_IRQHandler(void)
{
int ch;
/ enter interrupt /
rt_interrupt_enter(); //在中断中一定要调用这对函数,进入中断
if (usart_interrupt_flag_get(BSP_USART,USART_INT_FLAG_RBNE) == SET) // 接收缓冲区不为空
{
ch = usart_data_receive(BSP_USART);
}
if (usart_interrupt_flag_get(BSP_USART,USART_INT_FLAG_IDLE) == SET) // 检测到帧中断
{
usart_data_receive(BSP_USART); // 必须要读,读出来的值不能要
ch = '�'; // 数据接收完毕,数组结束标志
rt_sem_release(&shell_rx_sem);
}
/ 读取到数据,将数据存入 ringbuffer /
rt_ringbuffer_putchar(&uart_rxcb, ch);
/ leave interrupt */
rt_interrupt_leave(); //在中断中一定要调用这对函数,离开中断
}
将他们放到下图中的位置
并将bsp_usart文件中的串口中断函数注释掉,如下面图片所示
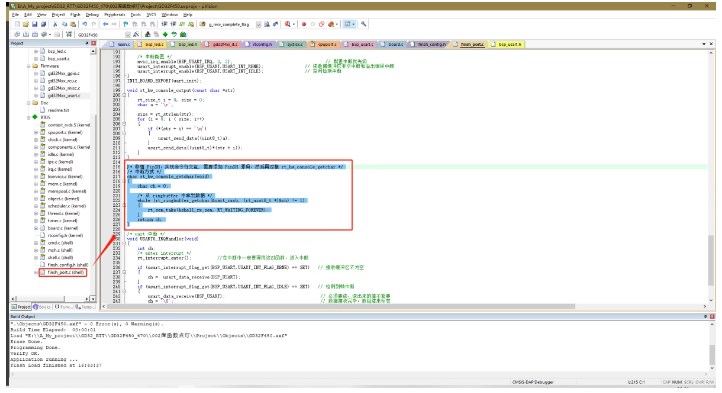
3.2 rt_hw_console_getchar函数实现
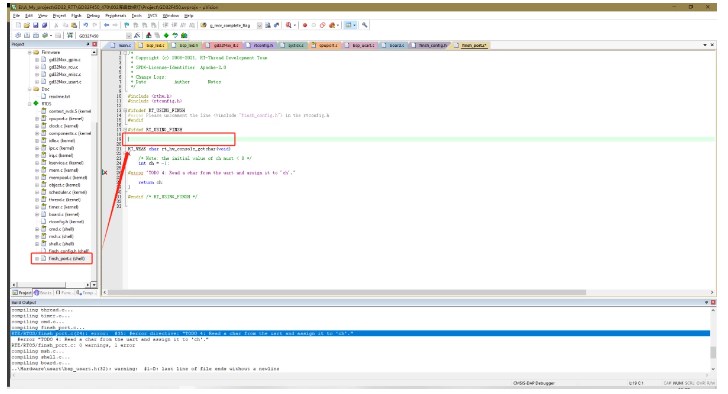
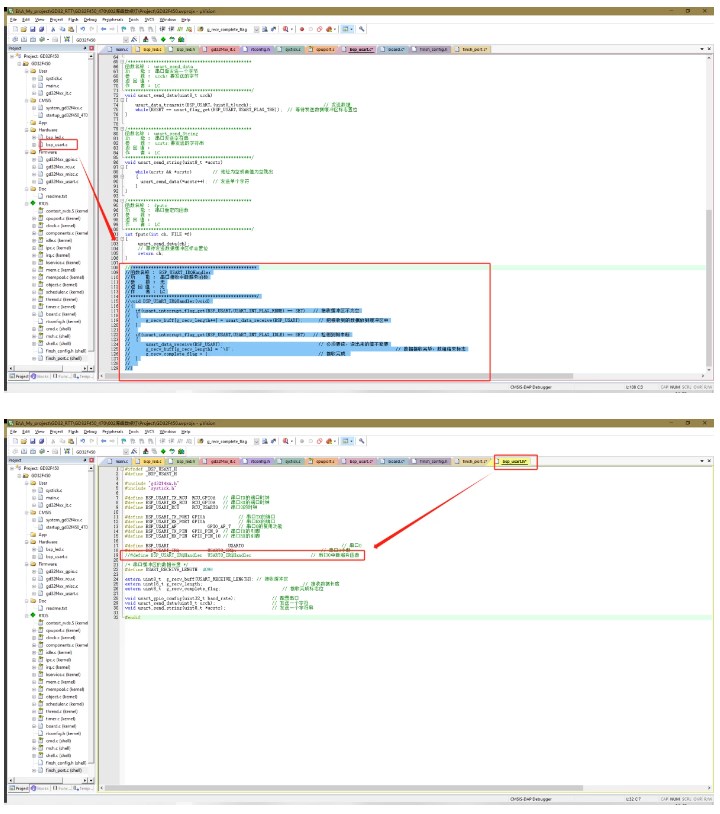
经过以上的步骤,已成功将官方示例的基础移植完成,这里只需要将官方示例中的rt_hw_console_getchar函数直接复制过来即可
/* 移植 FinSH,实现命令行交互, 需要添加 FinSH 源码,然后再对接 rt_hw_console_getchar /
/ 中断方式 /
char rt_hw_console_getchar(void)
{
char ch = 0;
/ 从 ringbuffer 中拿出数据 */
while (rt_ringbuffer_getchar(&uart_rxcb, (rt_uint8_t *)&ch) != 1)
{
rt_sem_take(&shell_rx_sem, RT_WAITING_FOREVER);
}
return ch;
}
将上面代码放置到下图中的位置
以上就实现了在梁山派的Nano上添加FinSH组件(实现命令输入)
这里直接烧录通过串口查看即可(记得注释掉main函数中的rt_kprintf打印函数,实验现象会明显一些)
实验现象如下图:
-
通过scons生成RT-Thread Studio工程,编译报rtconfig_preinc.h告警怎么解决?2025-09-29 604
-
rt-thread studio新建gd32f450工程2023-09-28 3129
-
梁山派GD32F450/470-RT-Thread Nano移植(一)2023-09-25 4239
-
RT-Thread开发GD32F450添加spiflash外设的步骤2023-08-07 3557
-
GD32F450的开发板工程RT系统启动错误如何解决呢?2023-02-21 1304
-
移植RT-Thread BSP中GDF450工程运行在GD32F470芯片上失败如何修改2022-11-07 1742
-
GD32F4系列芯片移植RTOS Demo工程 GD32F407移植FreeRTOS GD32F407移植RT-Thread2022-06-07 3280
-
基于 Keil MDK 移植 RT-Thread Nano2022-01-26 1677
-
HC32F460移植RT-Thread Nano+FinSh工程源码下载2022-01-05 1383
-
【国产MCU系列】在 HK32F030 上移植 RT-Thread Nano2021-11-21 1190
-
【国产MCU移植】HC32F460基于Keil MDK 移植 RT-Thread Nano2021-11-18 1522
-
移植RT-Thread操作系统到GD32星空派开发板2021-10-13 6486
全部0条评论

快来发表一下你的评论吧 !
