

myArm 全新七轴桌面型机械臂
电子说
描述
引言
在不断演进的科技世界中,我们始终追求创新和卓越,以满足客户的需求并超越他们的期望。今天,我们很高兴地宣布我们的最新产品——myArm 300 Pi,一款七轴的桌面型机械臂。这款产品的独特之处在于其灵活性和可编程性,以及它的工作半径和嵌入式控制主板的选择。在本文中,我们将详细介绍myArm 300 Pi的特性和功能,并将其与我们的六轴机械臂进行比较,以便您更好地理解我们的新产品以及它如何满足您的需求。
Introduction
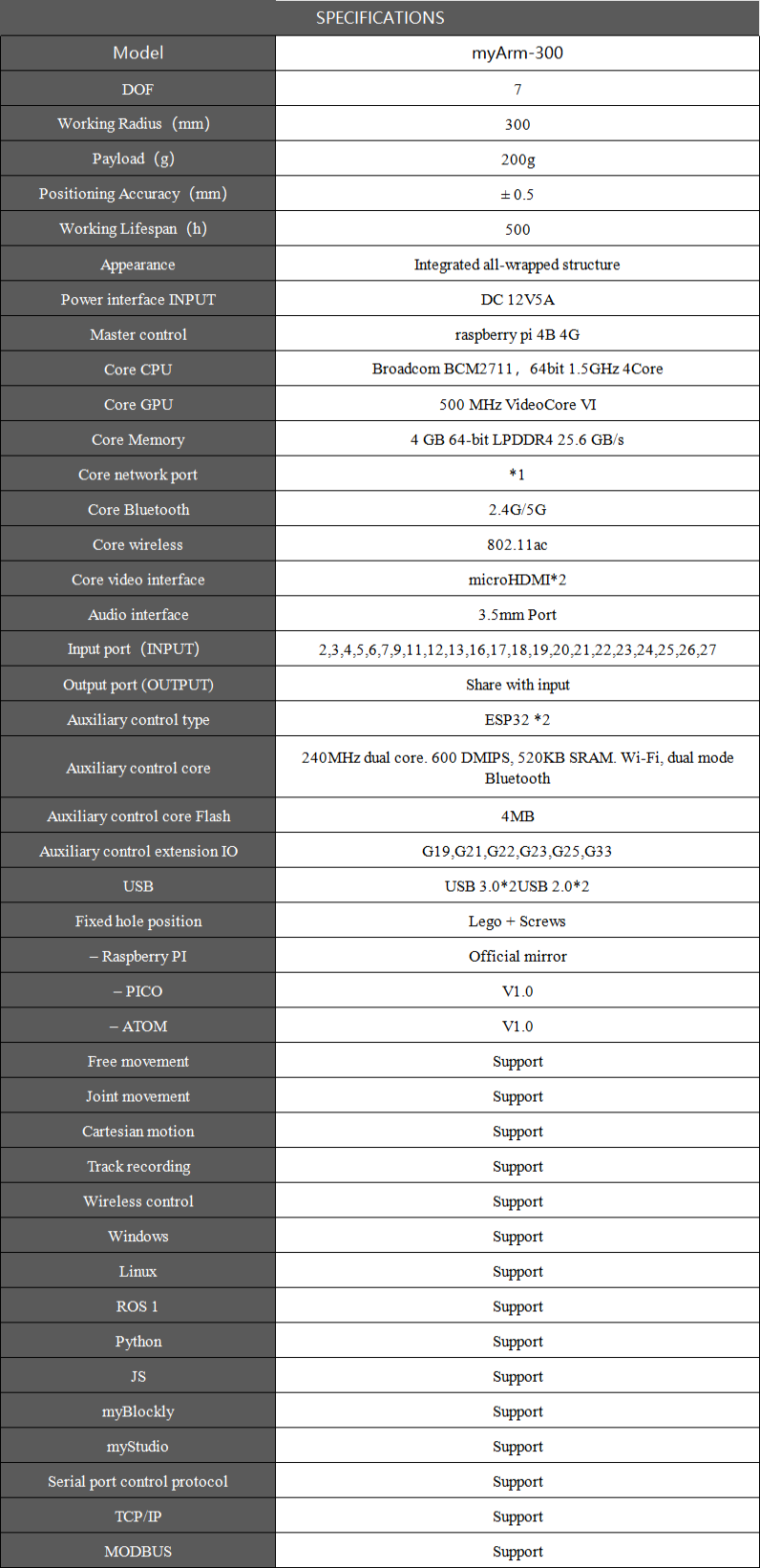
myArm 300 Pi是一块全新的7自由度的中心对称构型协作机械臂,设计风格延续了myCobot系列的小巧轻便的特点。myArm搭载着7个高精度的伺服电机,使得最大工作半径300mm,末端最大负载成都能够达到200g,重复定位精度最高达到了±0.5mm。

myArm 300 Pi的控制主板采用了树莓派4B 4G,这是一种广受欢迎的微型计算机,因其强大的性能和灵活的编程环境而备受赞誉。这意味着用户可以使用多种编程语言来控制myArm 300 Pi,包括Python、C++、Java等,极大地提高了使用者的便利性和灵活性,它还支持ROS1/ROS2 在ROS操作系统中提供了许多功能,例如路径规划,避障,三维感知等。
可能你会问为什么要出一个7自由度的机械臂呢?6个自由度的机械臂不已经是模拟人们手臂的关节了嘛?接下来跟随着我们一起来探讨为什么要有7个自由度的机械臂。
6自由度的机械臂和7自由度的机械臂有什么区别?
接下来我们主要从四个方面来介绍6自由度的和7自由度的机械臂有什么区别。
自由度
顾名思义,从数量上七自由度的机械臂会比六自由度的机械臂多一个可以活动的关节。在大多数情况下,一个六轴机械臂具有完成其任务所需的最小自由度,三个自由度用于空间位置定位,另外三个自由度用于末端执行器的定位方向。而七轴机械臂是一个冗余的机器人,它同样有3个轴用于定位,三个轴用于定向,多的一个轴通常用于提供更多的灵活性和运动自由度。(冗余机器人是指超过了完成特定的任务所需的最小的自由度的机器人)
复杂的动作
这两种机械臂最大的一个特点是,7轴机械臂可以在做一些复杂的动作,保持末端的三维结构不变的情况下变换到另一个构型。而六轴机械臂是做不到的,六轴机械臂在同一个位置进行工作的时候,有时候会整个机械臂扭到另一边。

就如图中所显示的一样,只是简单的平移一个位置,机械臂的整体会进行一个大的结构变化。这是因为6轴机械臂关节的限制所导致的一个结果。(图中的是myCobot 280 一个六轴的机械臂)
我们再看myArm同样的效果是怎样的,保持机械臂末端的位置不进行大幅的改变。

这个动作是7轴机械臂能够做到的特别的运动轨迹,另一种说法叫冗余机械臂,可以在保持末端坐标位置的同时,机械臂的整体可以进行大幅度的改变,这是6轴机械臂做所不到的复杂动作。还有一些特别的动作是7轴才能够完成的,例如下图的伸缩的轨迹。这使得myArm可以在更狭窄,更复杂的环境中工作。

应用的环境
六轴机械臂和七轴机械臂在大多数的场景下都能够应付,例如工业生产,物流和仓储,医疗领域,研究和开发,服务行业,教育等场景。
但是在一些 特定的场景当中使用7轴机械臂可以更加适合,主要是因为7轴机械臂有更大的灵活性和更复杂的运动能力。
复杂的路径规划:在需要机械臂沿着特定路径(例如复杂的曲线或者在障碍物周围)进行精确移动的情况下,7轴机械臂可能会比6轴机械臂更有优势。这是因为额外的关节可以提供更多的运动自由度,使机械臂能够在更复杂的环境中进行操作。
空间的利用率:在空间有限的环境中,例如在紧凑的工作站或者拥挤的工厂环境中,7轴机械臂可以更好地利用空间,执行更复杂的任务。额外的关节可以使机械臂在执行任务时采取更多的姿势,从而在有限的空间内完成更多的工作。
精密操作:在需要进行精密操作的应用中,例如微创手术或者微电子设备的装配,7轴机械臂可能会比6轴机械臂更有优势。额外的关节可以提供更精确的控制,使机械臂能够进行更精细的操作。
避障:7轴机械臂由于多出的一个自由度,使得在需要避开障碍物的场景中,7轴机械臂能够更好地完成任务。例如,在复杂的工厂环境或者在需要避开人体进行手术的医疗环境。
控制和编程
控制
从正逆运动学的角度来说,正运动学是给定指定的机械臂的关节角度,计算机械臂末端的位置和方向的过程 ,在6轴和 7轴机械臂中,正运动学都是相对直接的,可以通过几何和三角函数来解决。
逆运动学是指给定机械臂末端的目标位置和方向,计算需要的关节角度的过程。对于6轴机器人,逆运动学问题通常有唯一解(在某些特定位置可能有多解或无解)。然而,对于7轴机器人,由于有一个额外的自由度,逆运动学问题可能有无穷多个解。这就需要使用一些优化方法或启发式方法来选择最优的解,例如选择最小化关节运动,避免关节极限,或者满足其他一些特定的约束条件的解。所以会比六轴机械臂 要复杂的多。更多的自由度意味着需要更复杂的控制策略,设计和制造,计算需求等。
编程
mycobot280 有的编程环境,myArm300都能适配,他不仅仅支持ROS环境,还能通过python进行控制,你完全可以选择你熟悉的编译平台,不需要在花费大量的时间去进行学习一门新的编译语言。

大象机器人在最大的程度上提供了更用户更多的可能。可以在各种平台上进行开发,开放了许多的控制接口,例如力矩,扭矩等参数。
总结
在对比六轴和七轴机械臂的性能和功能后,我们可以看到myArm 300 Pi七轴机械臂的出色之处。七轴机械臂的一个显著优点是其增强的灵活性和自由度,这使得它可以在更复杂、更狭窄的环境中工作,执行更为复杂的任务。相比之下,尽管六轴机械臂在许多应用中已经表现得足够好,但在某些特定场景下,比如需要在狭窄空间内进行精细操作的情况,七轴机械臂的优势就显现出来。
此外,myArm 300 Pi七轴机械臂的树莓派控制主板、开放的控制接口和ROS机器人操作系统使得它在编程灵活性和扩展性方面超越了传统的六轴机械臂。这些特性使得myArm 300 Pi不仅适用于传统的机械操作任务,也非常适合进行高级的机器人研究和开发。
我们希望更多的用户能用myArm创作出更加有趣,有意义的项目,如果你想了解更多关于myArm的信息请点击连接,如果有提议的请在下方留言,如果喜欢这篇文章请给我们点赞!
审核编辑 黄宇
-
七轴机械臂控制方案,需要控制7个三相交流电机,请问哪个cpu适合?2018-06-06 2785
-
请问五轴机械手主臂的负载转矩是如何去计算的?2021-06-28 1689
-
众为兴SCARA四轴机械臂编程概述2021-07-20 1483
-
基于单片机的三轴机械臂控制怎么实现2021-12-13 2415
-
设备R轴及微型机械臂的应用优势是什么2020-10-12 2435
-
由MPU 6050控制的简单2轴伺服机械臂2022-11-23 1169
-
如何选择一款六轴机械臂作为入门(教育或者研究)机械臂?2022-12-09 3217
-
大象机器人推出桌面高精度机械臂ultraArm,配五大套装,助力最燃AI视觉玩法2023-01-04 1476
-
如何完成机械臂的运动控制模块2023-02-10 2961
-
开源七轴myArm协作机械臂正逆运动学技术讲解2023-11-06 3399
-
七轴开源协作机械臂myArm视觉跟踪技术!2023-12-18 2663
-
【开源获奖案例】四轴机械臂控制系统2023-12-23 2807
-
宏集七轴机械臂,以精准力控实现柔性抛光打磨!2024-01-03 1482
-
大象机器人开源协作机械臂机械臂接入GPT4o大模型!2024-07-03 2636
-
桌面级六自由度机械臂开源项目介绍2026-05-13 589
全部0条评论

快来发表一下你的评论吧 !
