

GIC驱动的执行流程是什么
描述
驱动流程分析
GIC驱动的执行流程如下图所示:
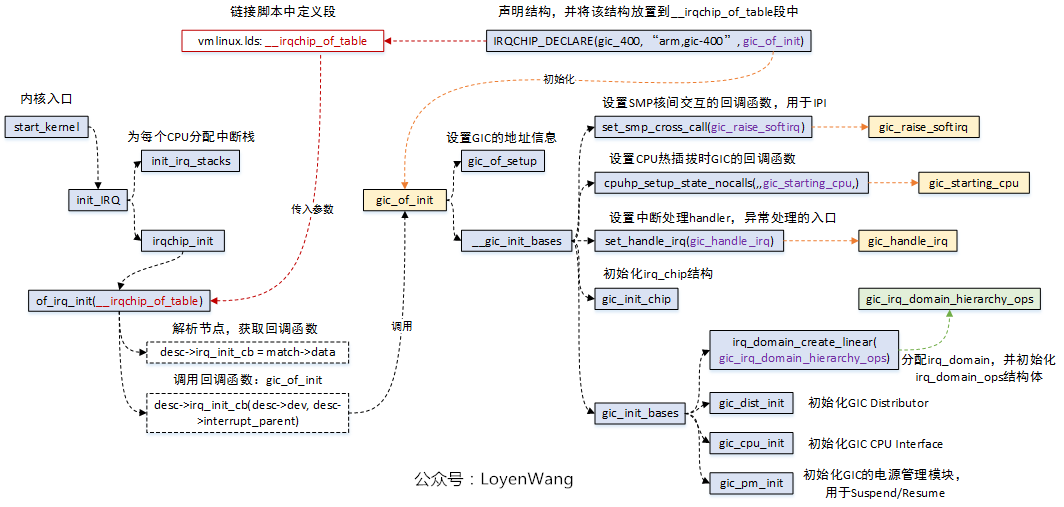
- 首先需要了解一下链接脚本
vmlinux.lds,脚本中定义了一个__irqchip_of_table段,该段用于存放中断控制器信息,用于最终来匹配设备; - 在GIC驱动程序中,使用
IRQCHIP_DECLARE宏来声明结构信息,包括compatible字段和回调函数,该宏会将这个结构放置到__irqchip_of_table字段中; - 在内核启动初始化中断的函数中,
of_irq_init函数会去查找设备节点信息,该函数的传入参数就是__irqchip_of_table段,由于IRQCHIP_DECLARE已经将信息填充好了,of_irq_init函数会根据arm,gic-400去查找对应的设备节点,并获取设备的信息。中断控制器也存在级联的情况,of_irq_init函数中也处理了这种情况; or_irq_init函数中,最终会回调IRQCHIP_DECLARE声明的回调函数,也就是gic_of_init,而这个函数就是GIC驱动的初始化入口函数了;- GIC的工作,本质上是由中断信号来驱动,因此驱动本身的工作就是完成各类信息的初始化,注册好相应的回调函数,以便能在信号到来之时去执行;
set_smp_process_call设置__smp_cross_call函数指向gic_raise_softirq,本质上就是通过软件来触发GIC的SGI中断,用于核间交互;cpuhp_setup_state_nocalls函数,设置好CPU进行热插拔时GIC的回调函数,以便在CPU热插拔时做相应处理;set_handle_irq函数的设置很关键,它将全局函数指针handle_arch_irq指向了gic_handle_irq,而处理器在进入中断异常时,会跳转到handle_arch_irq执行,所以,可以认为它就是中断处理的入口函数了;- 驱动中完成了各类函数的注册,此外还完成了
irq_chip,irq_domain等结构体的初始化,这些结构在下文会进一步分析; - 最后,完成GIC硬件模块的初始化设置,以及电源管理相关的注册等工作;
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
bootm命令的执行流程2023-12-04 2346
-
GIC-600的组件是如何连接的2023-11-07 1684
-
GIC是什么意思 GIC硬件原理2023-09-28 3680
-
U-boot的执行流程2023-07-14 1456
-
ARM GIC电源管理使用手册指南2022-05-27 5993
-
ARM GIC(二)之中断术语的定义2022-04-06 2975
-
ARM之中断GIC分析2018-11-26 4283
-
应用K值算法的甘肃电网GIC-Q扰动计算2018-01-31 844
-
小电阻器对治理电网GIC的效果分析2018-01-04 1021
-
mfc程序执行流程小结,MFC程序的执行顺序2017-12-08 10227
-
基于GIC的物联网的应用方案2017-09-18 807
全部0条评论

快来发表一下你的评论吧 !
