

软机器人中的传感技术综述
MEMS/传感技术
描述
背景介绍
满足人类需求的快速工业化导致自动化在制造、包装、医药、农业和食品工业中被广泛采用。配备传感器的机器人实现了“工业4.0”技术,如物联网(IoT)、大数据分析和人工智能,用于监测和控制这些机器人的功能。目前,刚性机器人被广泛采用,具有高度可靠性、准确性和耐用性。
然而,处理更精细和脆弱的物体需要具有软接口的机器人,这导致了人们对软机器人的兴趣增加。顾名思义,软机器(soft robotics)人是由软材料制成的,或者有一个覆盖刚性骨架/支架的软界面。软体机器人具有灵活性,能够快速适应物体的形状。机械柔顺性显著降低了抓取物体所施加的压力,这与刚性机器人不同,刚性机器人的接触面积由于抓取器的刚性形式而受到限制。软机器人也非常适合安全优先的医疗保健等应用。
此外,由于其柔软且无关节的身体,软机器人可以访问远程区域并执行使用硬机器人难以完成的功能。根据应用类型,软机器人可以有各种形状、形式和驱动机制,如抓握、移动、水下探索、飞行等。本综述的主要重点是集成到软机器人抓取器中的传感器,这些传感器在农业收割、仓库管理和医疗保健方面越来越受欢迎。
软机器人具有独特的特性,如大自由度、高机械柔顺性以及通过内部驱动和外部负载进行变形的能力。这使得在三维(3D)空间中准确地检测机器人抓取器的每个部分的形状和位置具有挑战性。与依赖关节和四肢精确控制的刚性机器人不同,软机器人控制需要形态计算,这取决于机器人的形态和材料特性。这就需要使用具有可编程材料特性的软材料。然而,与刚性关节的简单运动学相比,软材料动力学建模要复杂得多,这使得控制和监测软机器人不同部件的形状和位置具有挑战性。
为了克服这一挑战,将传感器集成到软机器人中至关重要。这些传感器能够监测和控制软机器人不同部件的形状和位置。此外,传感器可以增强软机器人对外部刺激的感知,如温度、pH、化学品、压力、光和声音,这大大拓宽了软机器人的应用范围。在传感器的帮助下,软机器人可以在医疗保健、农业和仓库管理等不同领域执行复杂任务。将传感器集成到软机器人中是一项挑战,因为传感器必须能够与机器人一起拉伸、弯曲和变形,而不会阻碍机器人的自由运动,同时在传感过程中保持其柔软性。这导致了与软传感器相关的非线性、奇异配置和非唯一映射。解决这些问题需要对传感器数据进行复杂的建模和分析,以准确地将环境刺激映射到传感器数据。此外,为了增加传感器的功能,软机器人必须配备高时空分辨率的传感器。
然而,这会产生大量的数据,必须快速处理才能进行闭环监测和控制。随着对软夹持器的需求不断增长,人们越来越需要集成各种传感器,如水果成熟度、温度、接近度、食物变质、pH值、气体传感器等。因此,选择合适的传感机制、传感器的数量及其智能集成对于最小化微控制器上的计算负载,实现高效的传感器集成至关重要。随着传感器成功集成到软机器人中,它们可以在各种应用中执行复杂的任务,并提高准确性和效率。
为了实现这一点,有必要对制造工艺的设计和选择进行适当的改变。一个能够将多材料集成到复杂形状中的新兴领域是多材料增材制造。该技术有助于高效可靠地制造具有集成传感器的软机器人。此外,最大限度地减少智能软机器人制造过程中涉及的步骤数量并使过程自动化对于提高致动和传感功能的可靠性和可重复性至关重要。
本文亮点
1. 这篇综述重点介绍了用于软机器人的传感技术的最新进展。
2. 它首先介绍了软机器人的驱动技术和材料选择,然后深入探讨了各种类型的传感器及其集成方法,以及多模态传感、信号处理和控制策略的好处。
3. 综述中还简要介绍了软机器人领域的当前市场领导者,以说明对该技术日益增长的需求。
图文解析

图1 构建智能软机器人的组件和注意事项。该图强调了构建智能软机器人所必需的关键组件,包括驱动、传感、操作能量/燃料,以及控制和通信电子设备。此外,还描述了制造方法、设计、控制算法和应用方面的重要考虑因素。

图2 软机器人的驱动技术
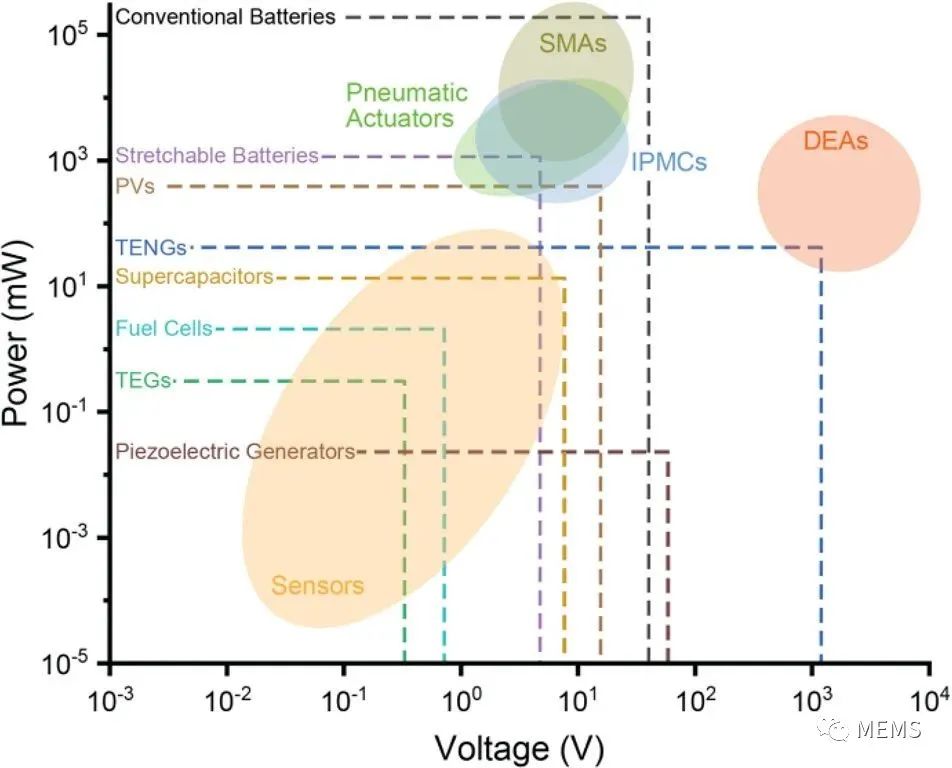
图3 软机器人中通常使用的不同致动机构的功耗比较
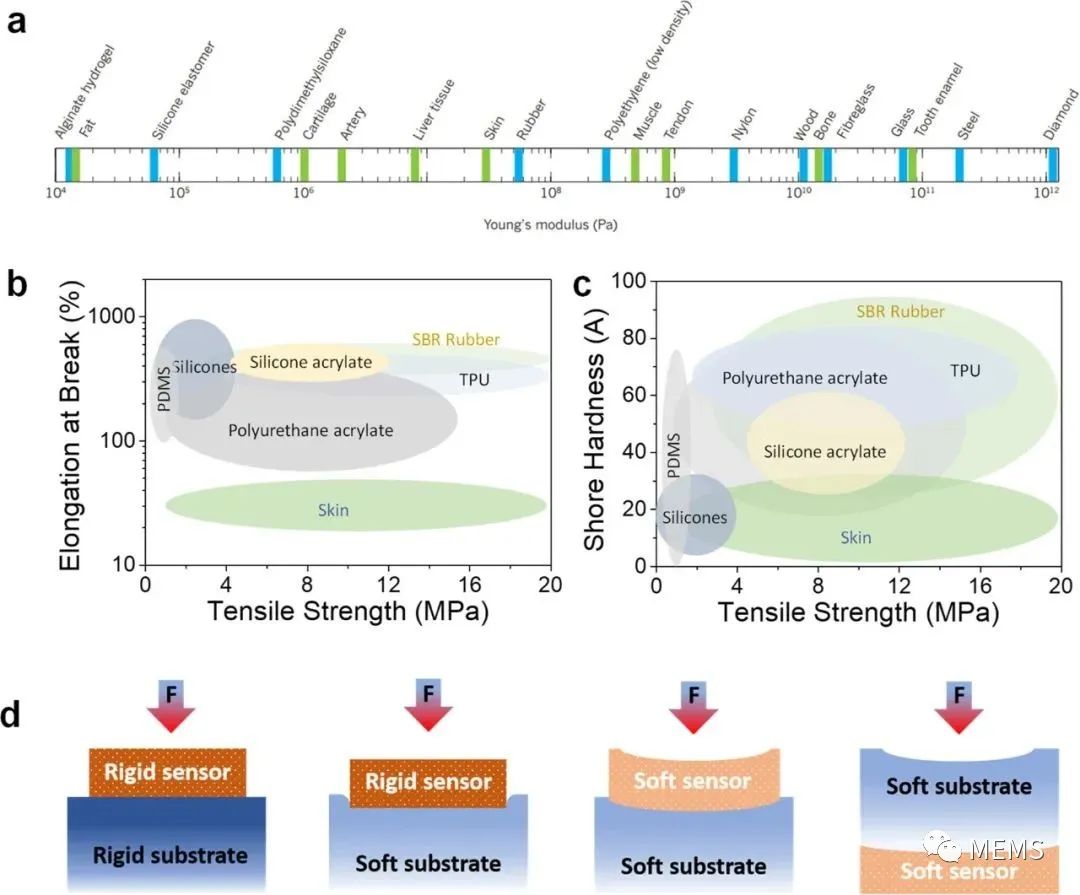
图4 用于软机器人的典型弹性体的材料特性。(a) 各种材料的杨氏模量。(b) 典型弹性体的断裂伸长率和拉伸强度。(c) 各类弹性体肖氏硬度与抗拉强度的比较。(d) 传感器和基板刚度组合的不同场景,用于软机器人中传感器的集成。
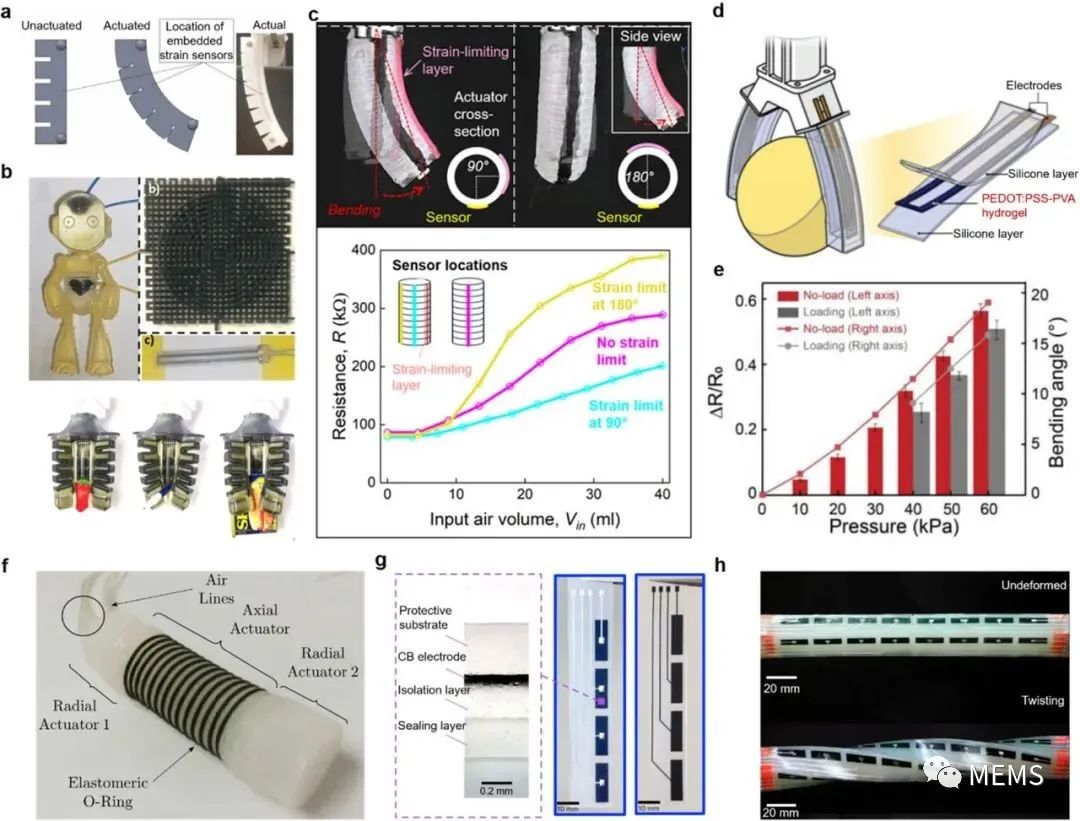
图5 用于软机器人的电阻式、压阻式和电容式传感器
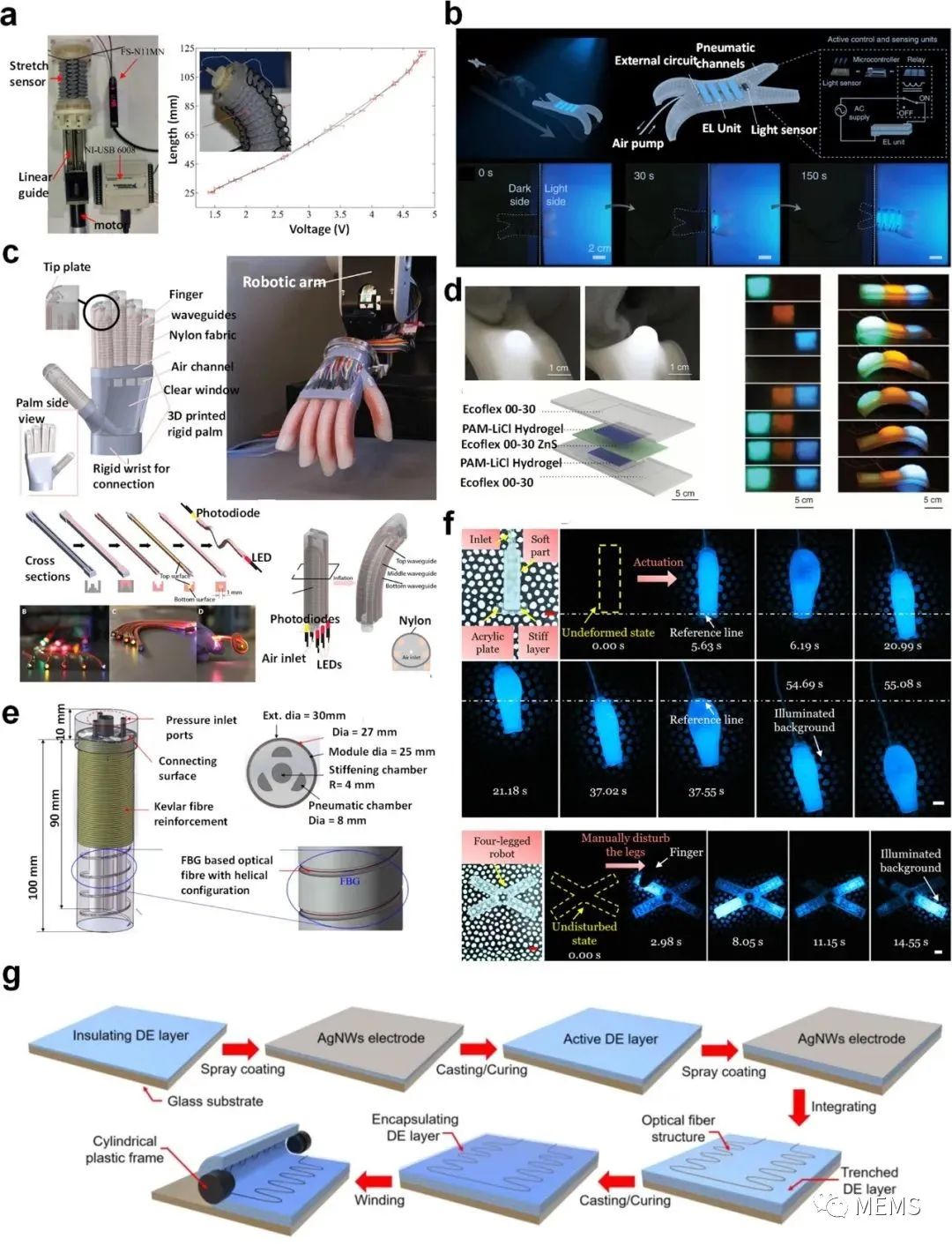
图6 用于软机器人的光学传感器
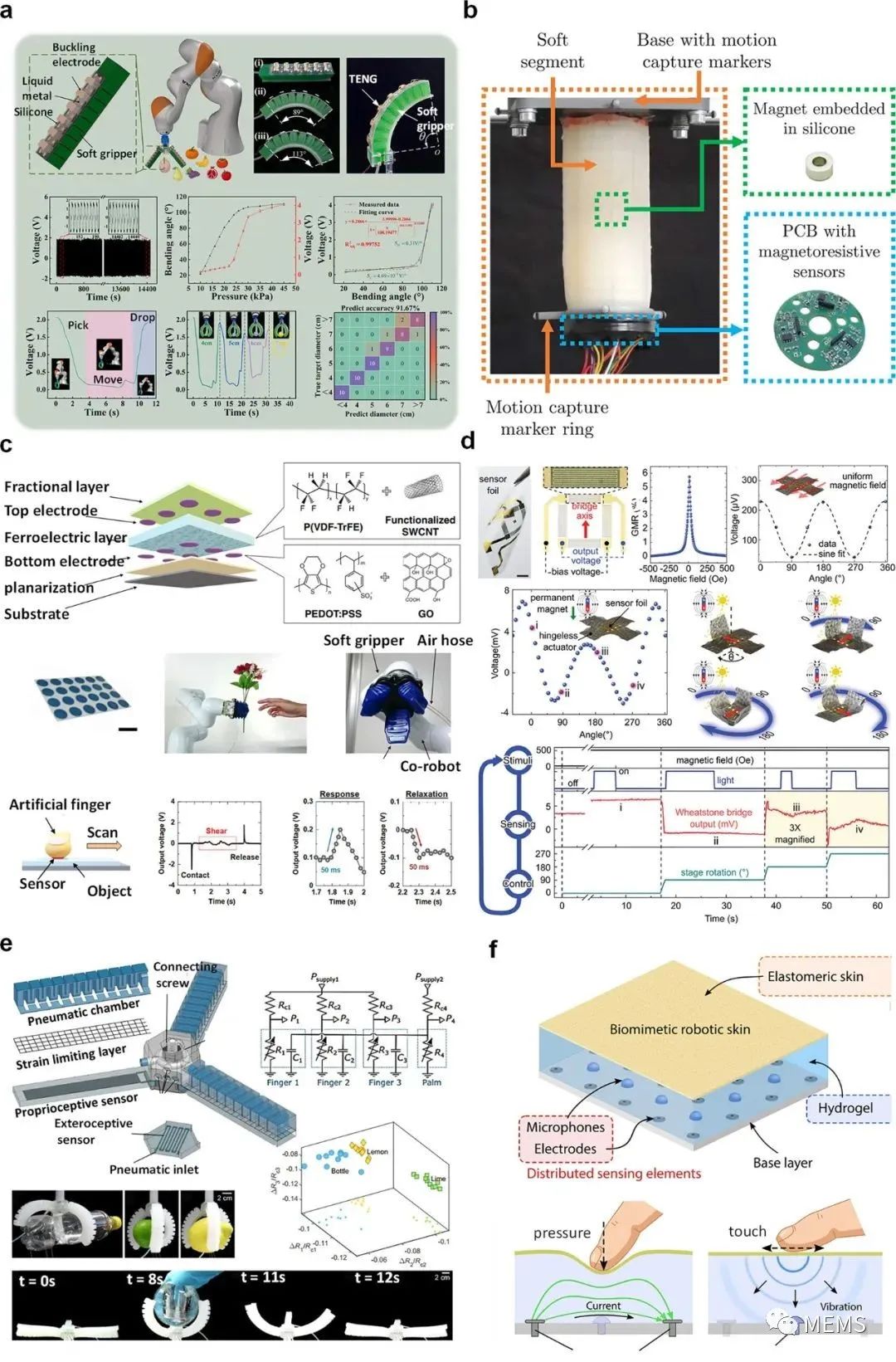
图7 用于软机器人的各种其他类型的传感器
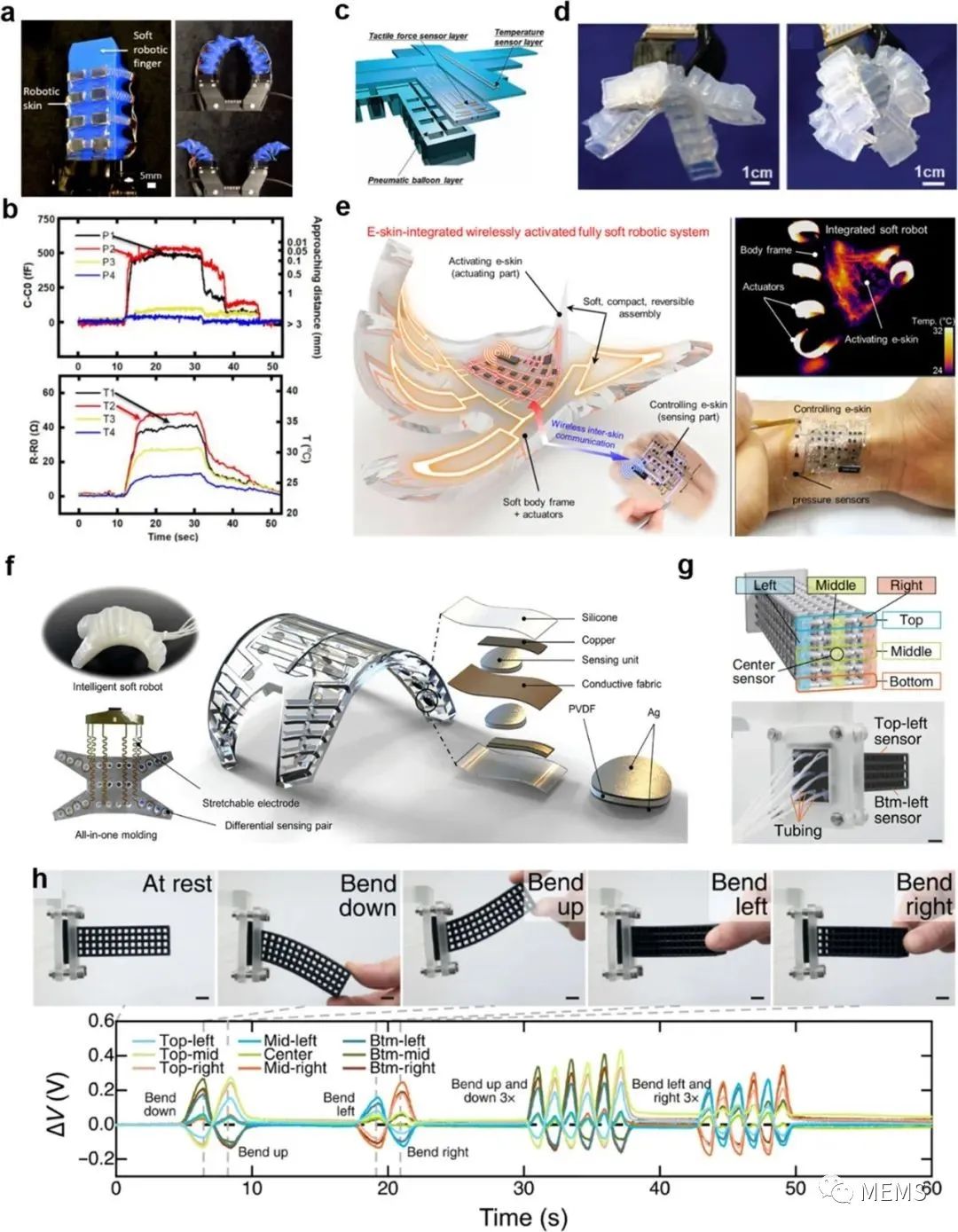
图8 软机器人上的集成多模式传感器
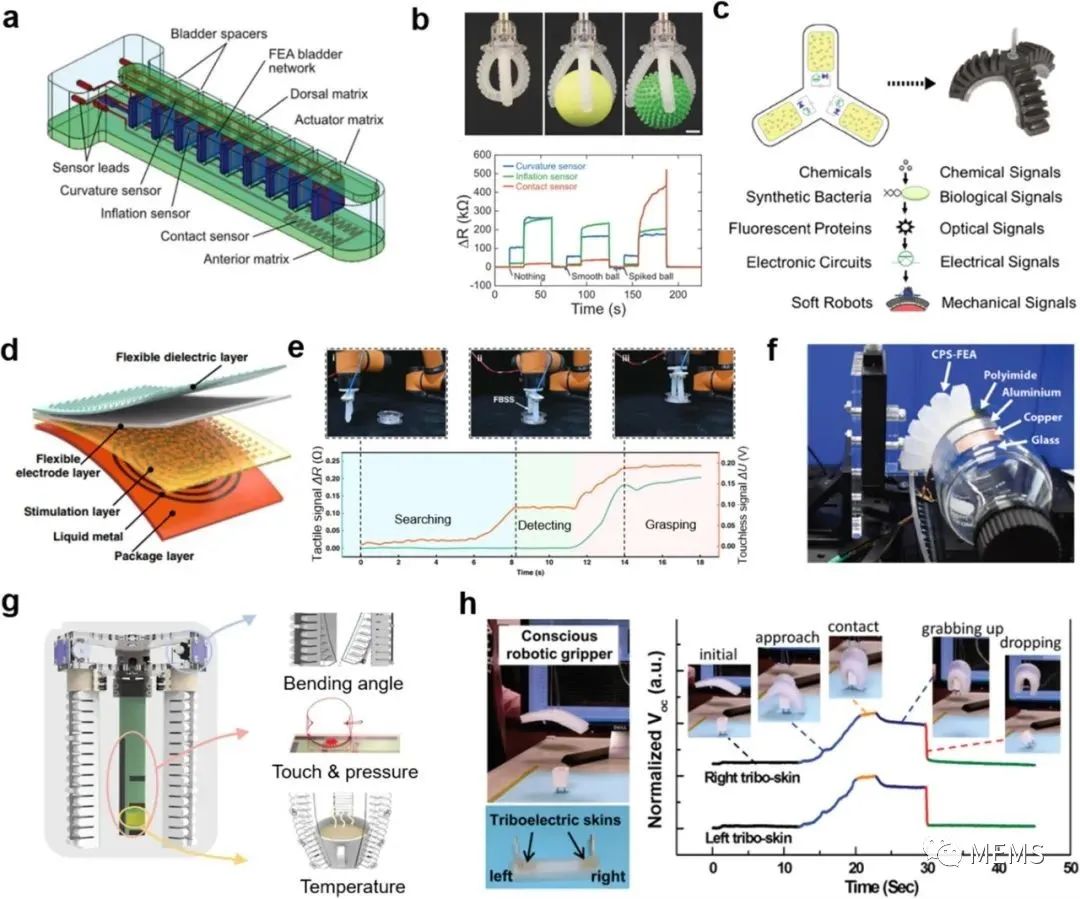
图9 软机器人上的集成多模式传感器
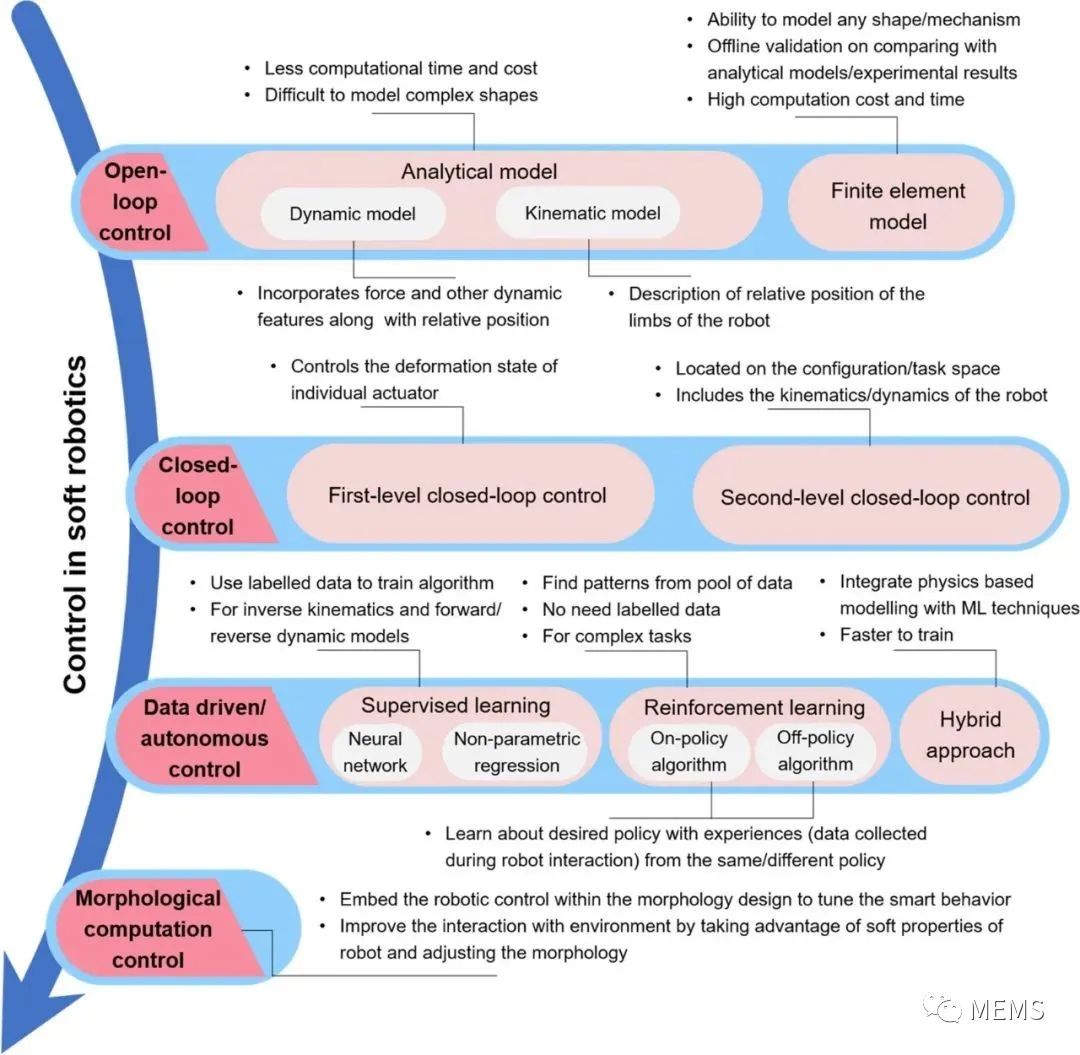
图10 用于软机器人控制的各种信号处理和控制策略
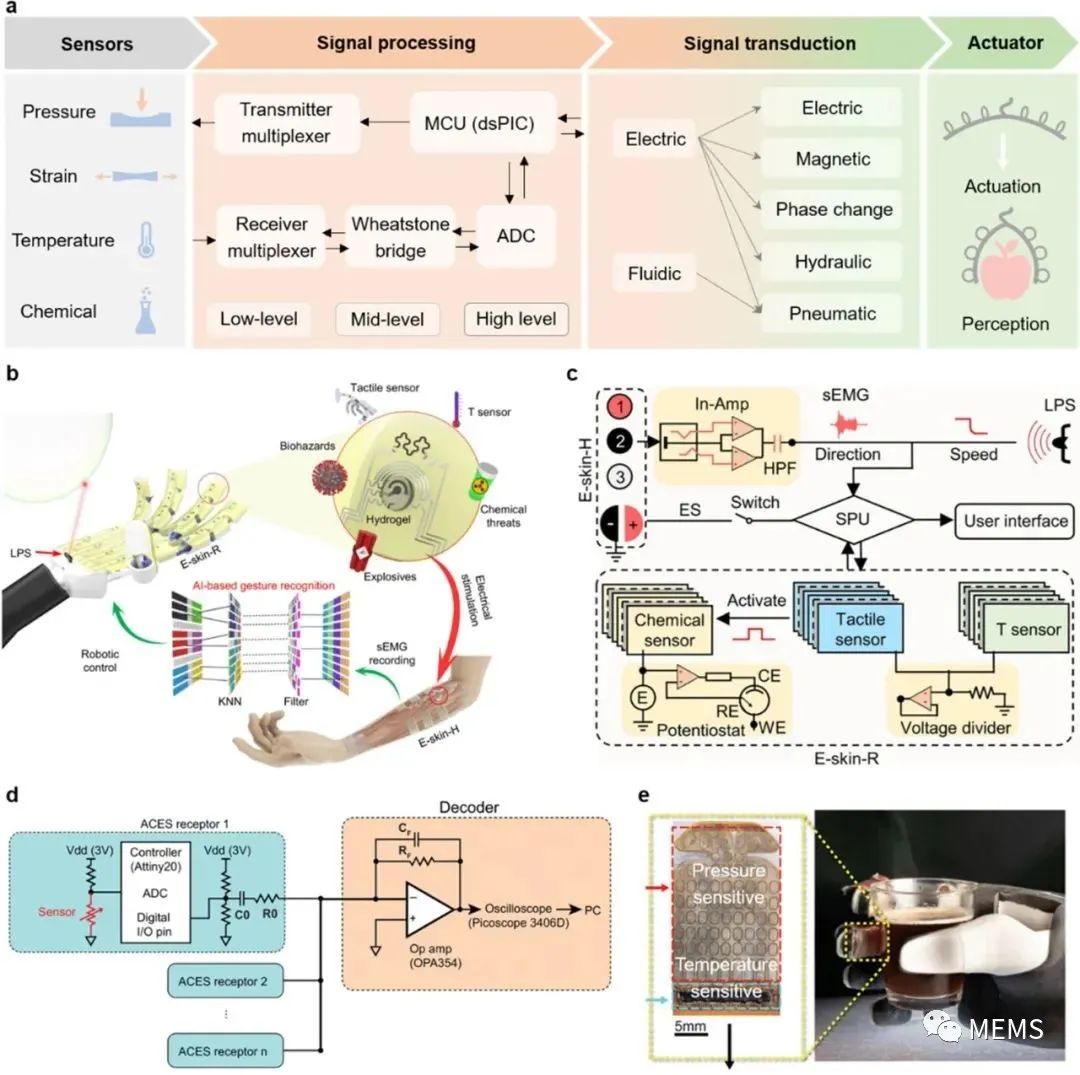
图11 软机器人中的一些相关信号处理技术。(a) 基于传感器数据的信号处理和后续执行器控制的工作流程。(b) 在机器人手指和手上集成软电子皮肤,用于触摸、接近、温度和危险物质的多模式检测(c),以及用于对从传感器收集的数据进行数据处理的相应电子电路。(d) 用于异步编码电子皮肤(ACES)的多阵列传感器的数据处理的电子电路,以及(e)机械手上的压力和温度传感器阵列的相应集成。
图12 软机器人闭环控制的例子
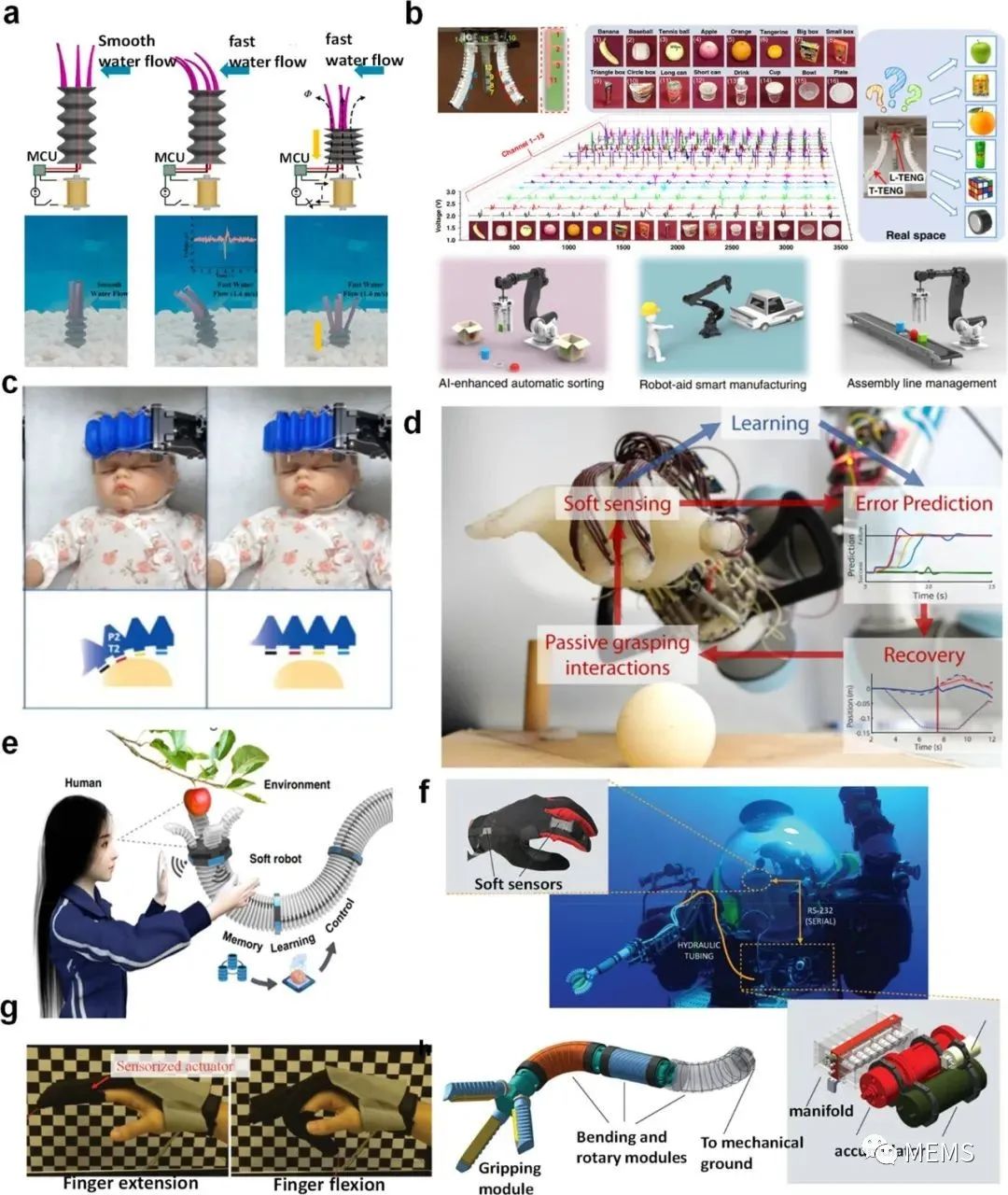
图13 具有传感能力的软机器人的各种应用
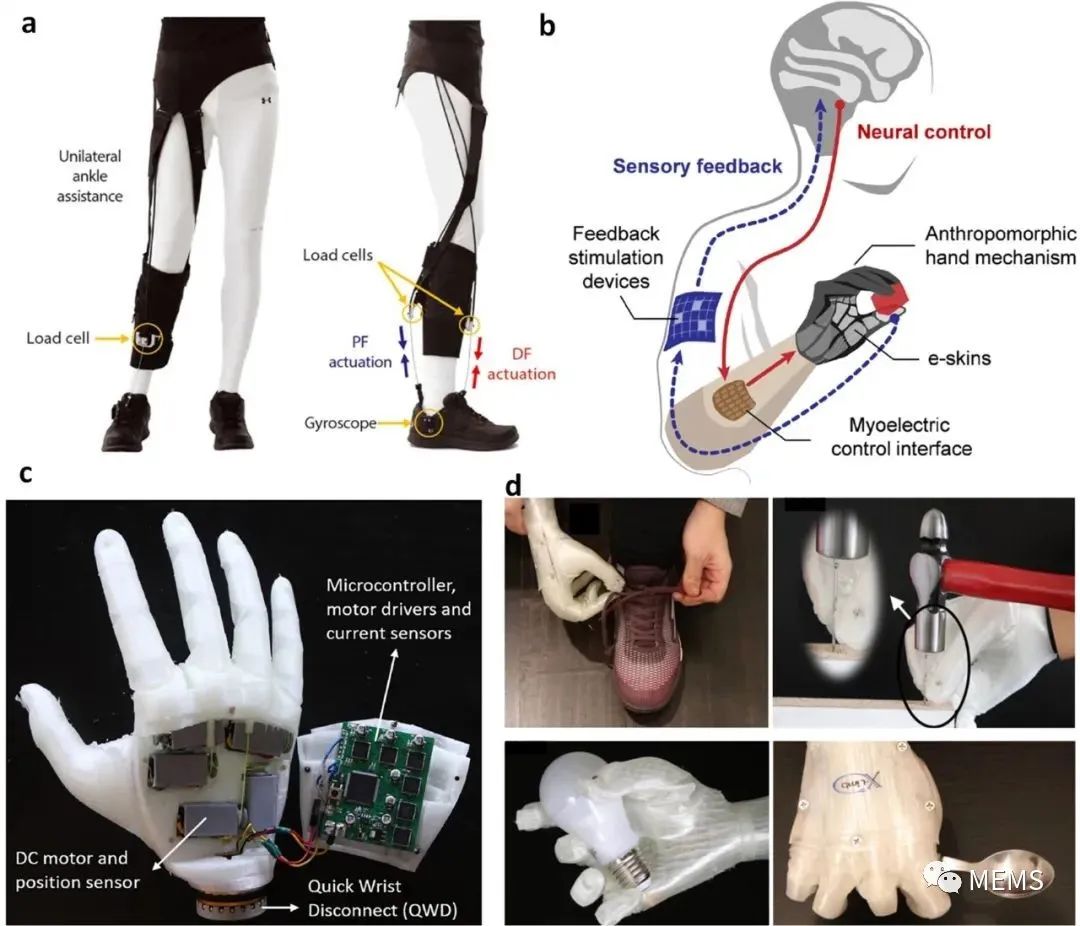
图14 假肢中集成传感器的软机器人示例
审核编辑:刘清
-
伺服电动缸在人形机器人中的应用2025-02-06 1945
-
超声波传感器在机器人中的应用2018-08-09 7997
-
基于ARM9的DF-1机器人传感器系统设计2019-06-21 2353
-
采用ARM9实现嵌入式仿人机器人传感器系统设计2019-07-29 2170
-
现代机器人中有什么传感器?2019-07-31 2846
-
DF-1仿人机器人怎么样?2019-09-18 2308
-
嵌入式技术在机器人中发挥什么作用2020-05-11 1839
-
工业机器人中面对的控制问题是什么2021-06-28 1484
-
工业机器人中有哪些控制问题2021-10-11 1682
-
语音合成技术在智能机器人中的应用2015-12-25 462
-
磁性位置传感器在自动化机器人中的作用2018-12-05 5227
-
盘点新传感器技术在现代机器人中的应用2018-12-11 4346
-
新型传感器技术在现代机器人中的应用2018-12-21 4601
-
传感器在机器人中的应用模式如何2020-01-01 1508
-
步进电机在工业机器人中的应用2024-06-17 1934
全部0条评论

快来发表一下你的评论吧 !
