

什么是S形加减速?步进电机控制算法—S形加减速运动算法介绍
工业控制
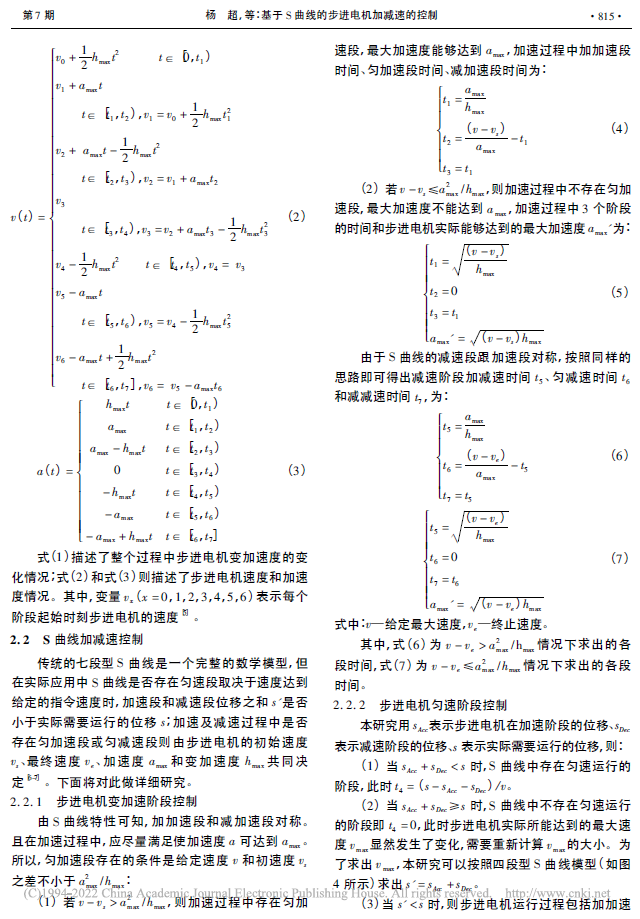
描述
什么是S形加减速
如下图所示,假设该装置使用步进电机实现物体X的移动,系统要求物体X从A点出发,到B点停止,移动的时间越短越好且系统稳定。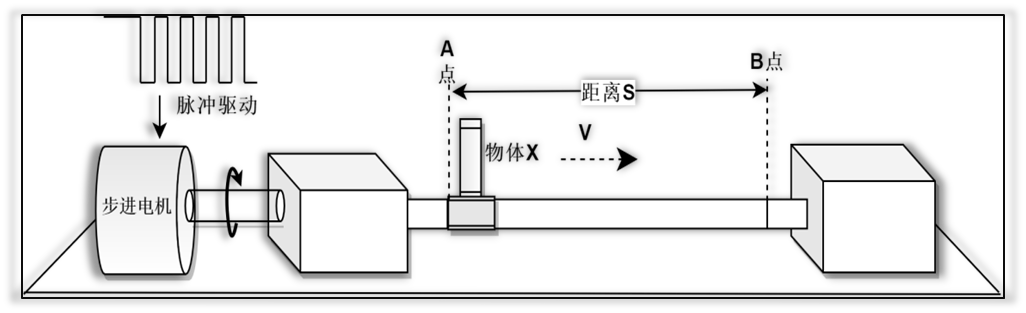
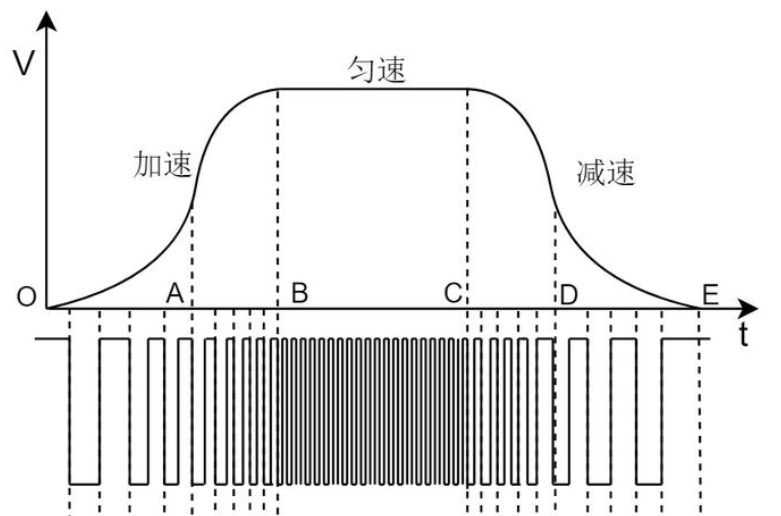
如果滑块从启动速度到目标速度的加减速不是以固定的比例进行加速/减速,而在加减速的变化过程中速度曲线呈现一个英文字母“S”形的,我们称之为S形加减速算法。则上述将这个过程描述为如下图所示:
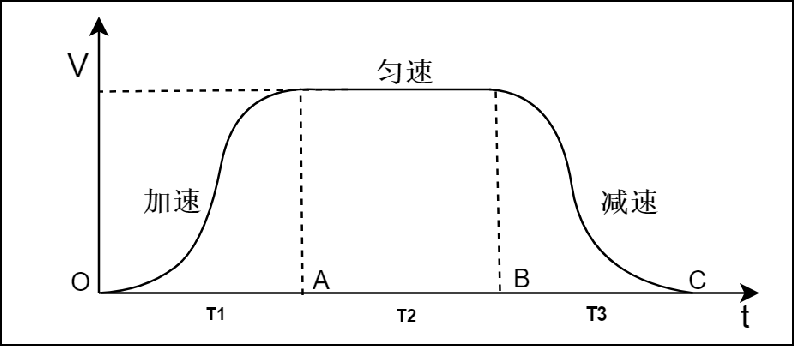
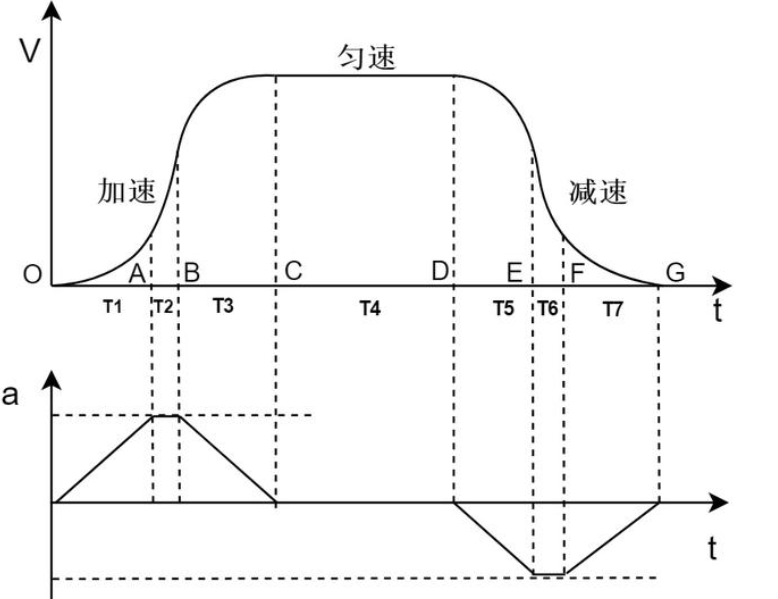
S曲线加减速模型
可以获知OA段其实就是滑块的加速部分、AB则是匀速部分,BC则是减速部分。在OA加速过程中,速度刚开始是缓慢增加,后来增加得越来越快,而在中点时刻,增加又有所放慢,但依然继续增加逼近设定的速度。实际这一阶段又分成了三个阶段在AB匀速过程中,加速到设定速度之后,以设定速度匀速步进;在BC减速部分中,以设定的速度开始按照加速度段的变化规律做减速变化,直到速度降至0后停止。
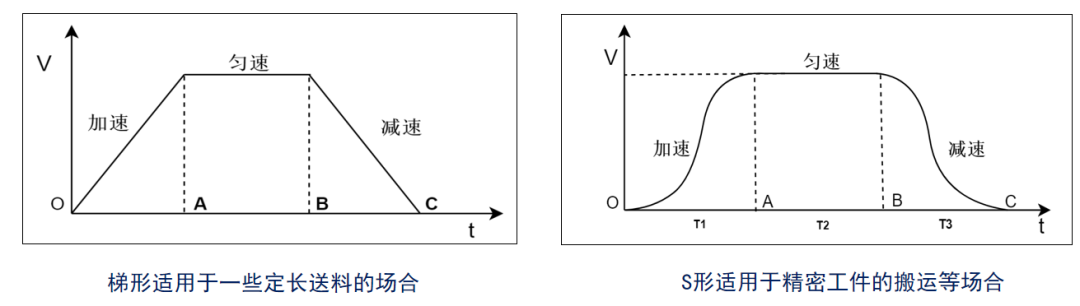
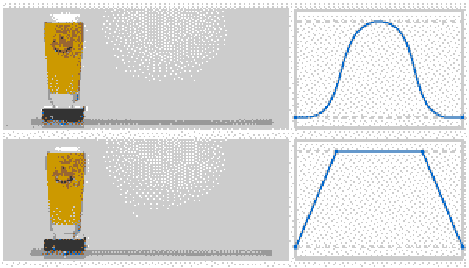
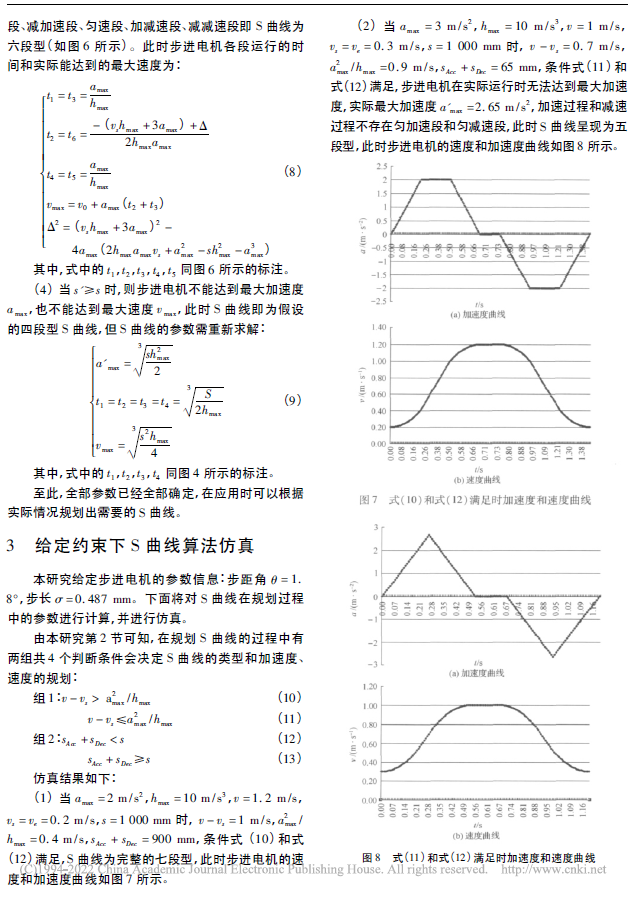
前面我们有提到梯形加减速的缺点,梯形加减速在启动、停止和高速运动的过程中会产生很大的冲击力振动和噪声,所以多数会应用于简单的定长送料的应用场合中,例如常见的3D打印机使用的就是梯形加减速算法;但是相比较S形加减速在启动停止以及高速运动时的速度变化的比较慢,导致冲击力噪音就很小,但这也决定了他在启动停止时需要较长的时间,所以多数适用于精密的工件搬运与建造。
梯形加减速与S形加减速差别
S形加减速在启动停止以及高速运动时的速度变化的比较慢,导致冲击力噪音就很小,所以更适用于精密的工件搬运与建造
S形加减速模型分析
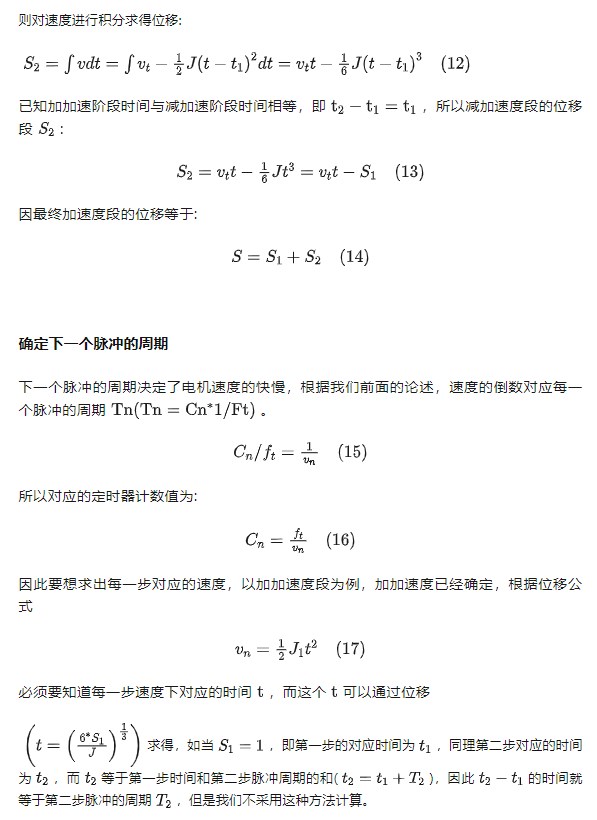
7段式算法特点:具有平稳、精度高的特点,但该算法的参数复杂,大大降低到了工作效率且对硬件的要求较高;
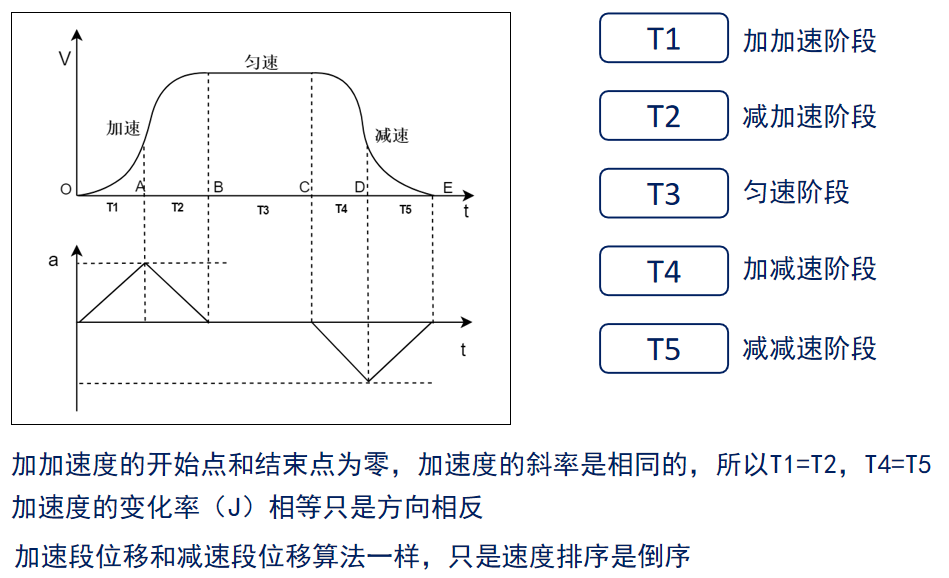
5段式算法特点:算法简单、具有实时性和高精度的加减速控制算法,非常适合资源紧凑的小型嵌入式系统。
五段式S形加减速模型分析
在进行S形加减速前我们必须要确定的目标量有如下:
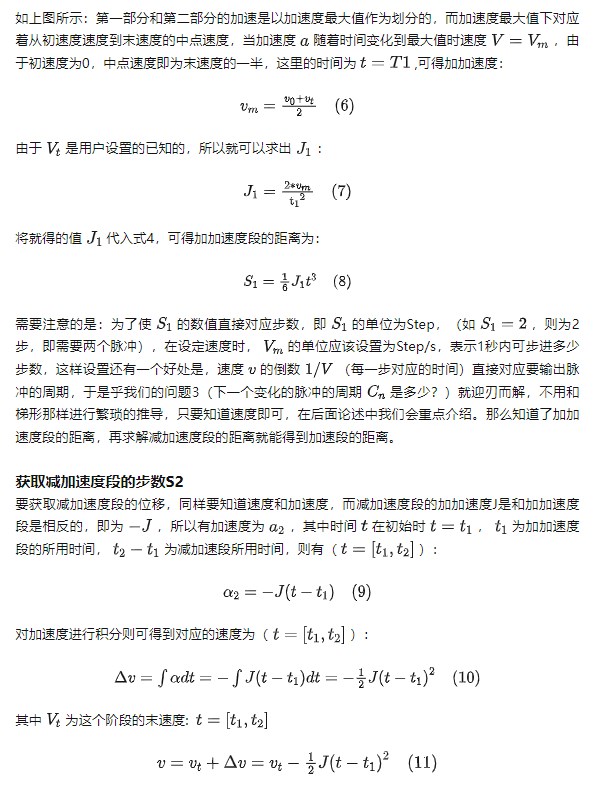
获取加加速度段的步数S1
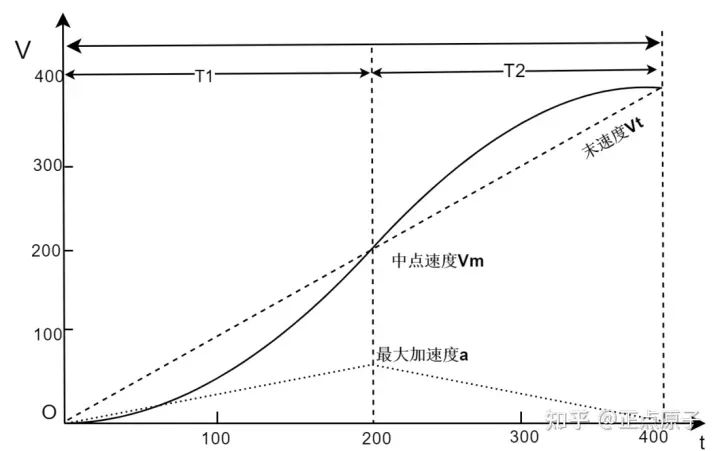
S曲线加速各阶段速度解析

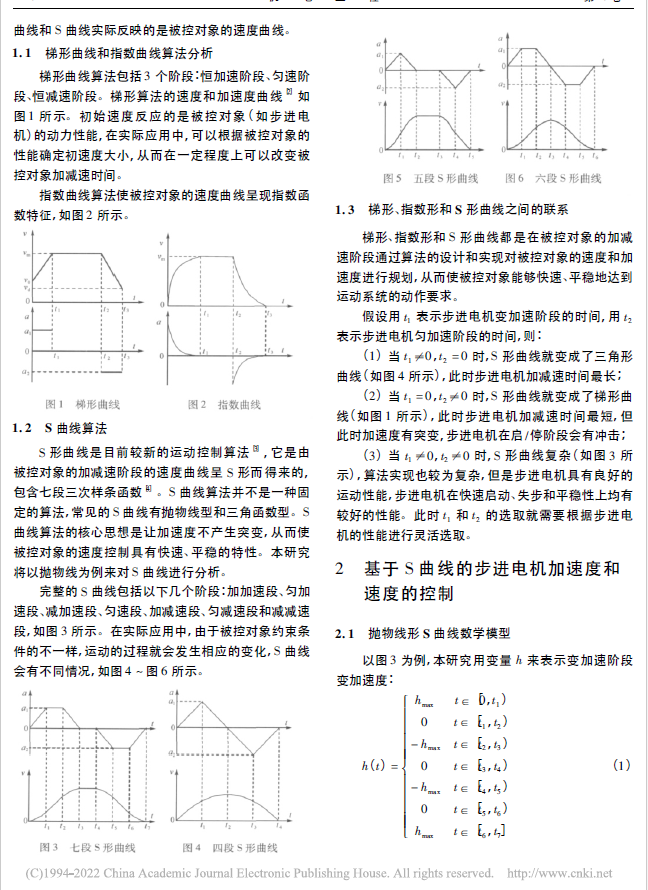
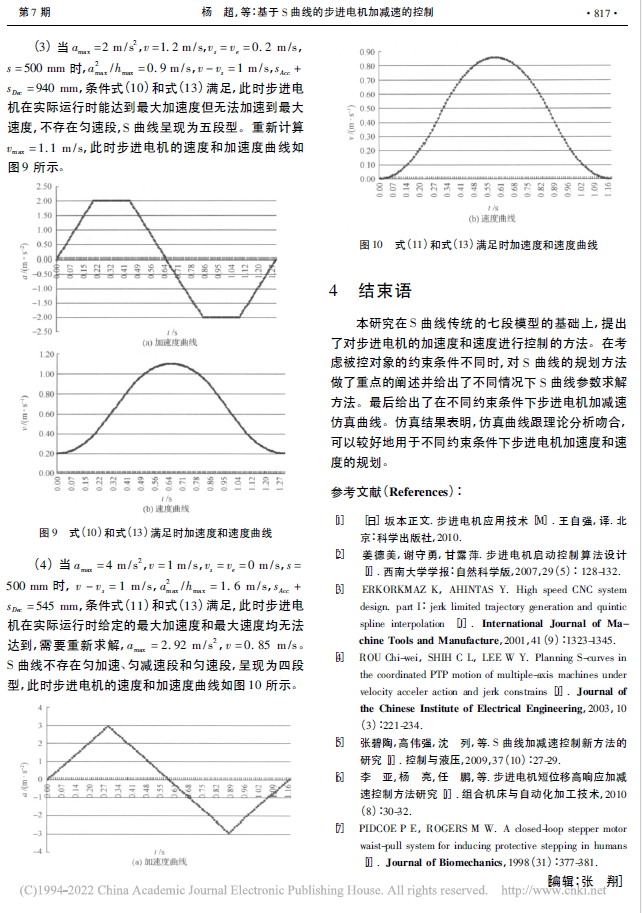
七段式S形加减速的原理
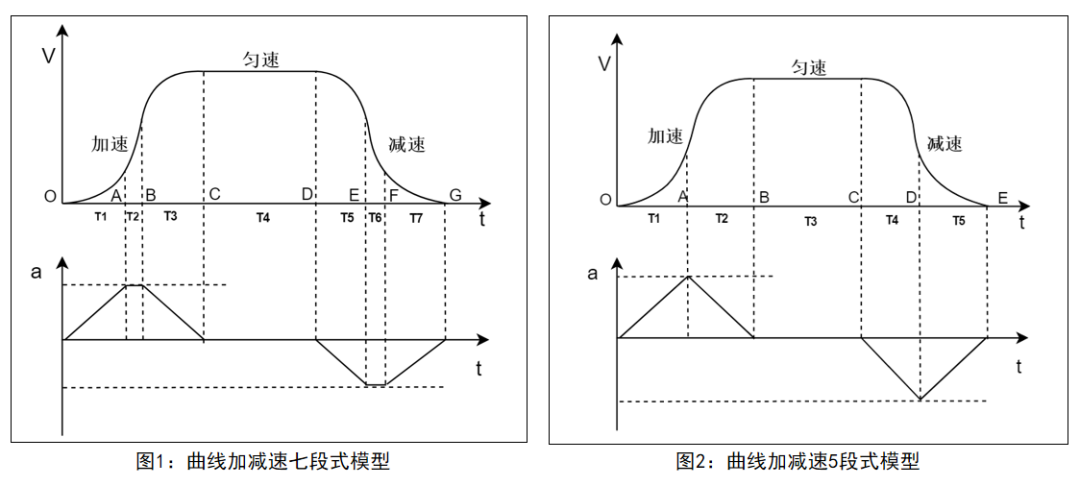
实际上要实现S型可以采用的方法有很多,在传统的S形曲线加减速算法中,它包括七个运动阶段:加加速阶段,恒加速阶段,减加速阶段,恒速阶段,加减速阶段,恒定减速阶段和减减速阶段。
S曲线加减速七段式模型
审核编辑:刘清
-
如何将S形加减速运用到实际的步进电机控制中去呢?2023-03-23 1557
-
步进电机驱动算法之S形加减速算法原理2023-03-20 1331
-
步进电机驱动算法之梯形加减速算法2023-03-17 1416
-
怎么实现步进电机S型曲线加减速算法?2021-10-12 2617
-
怎么实现S形加减速算法?2021-10-09 1378
-
加减速控制曲线直线(梯形)2021-09-03 1867
-
步进电机驱动算法——S形加减速算法原理 精选资料下载2021-07-08 1377
-
步进电机梯形加减速算法的原理是什么2021-07-07 1720
-
STM32:F407步进电机S形加减速算法的实现相关资料分享2021-06-28 1893
-
如何使用STM32进行步进电机离散化S形曲线加减速控制方法的资料说明2019-04-28 2649
-
如何使用S曲线进行步进电机加减速的控制设计资料说明2019-03-13 2331
-
关于步进电机加减速运动的C程序编写2016-12-07 17952
-
基于S曲线的步进电机加减速的控制2016-05-03 950
-
一种预判插补时间的S形加减速插补算法2016-04-29 784
全部0条评论

快来发表一下你的评论吧 !
