

T-BOX与CAN通信介绍
电子说
描述
下图是目前汽车内的主流总线架构形式(图中每个框代表一个ECU)
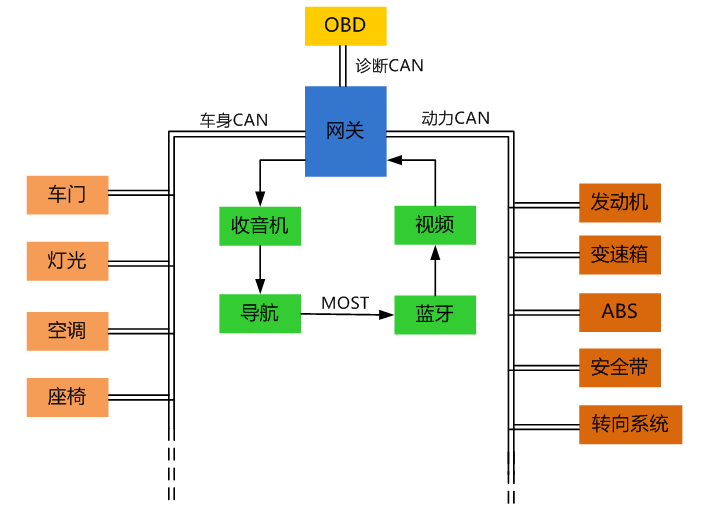
OBD: On-Board Diagnostic 车载诊断系统
MOST: Media Oriented System Transport 面向媒体的系统传输总线
CAN总线为了便于管理和控制,一般按功能需求进行划分,传统汽车主要分动力和车身两大块,车身总线采用低速,动力采用高速。还留有一路专门做诊断的CAN连到车内的OBD接口。另外,由于现在车内导航、影音的需求太大,CAN总线没办法提供给视频数据如此高的传输速率,所以在车载导航和娱乐系统中,一般采用速率可达22.5Mb/s 的MOST总线或其他类似的高速总线。
不同总线网络之间通信,全部依靠网关转发报文。因此,网关也基本是车内总线中最重要的部件,重要性就相当于人体的脊椎。各厂商的架构根据其需求会略有不同,但总体上都是这种模式。
如果要实现车联网,即车与网联动。在CAN总线为主导的今天,势必要将具有联网功能的模块加入到车内CAN总线架构中。在已经实现第一阶段技术的车联网产品中,大概又有三种技术方案。
OBD盒子联网
将可联网的设备(OBD盒子)插入车辆的OBD诊断接口,通过诊断CAN读取车辆的相关行驶信息。这种方案被很多互联网企业采用,汽车厂商只有极少数采用。
优点:
无需改动车内的总线架构,无需汽车厂商的配合,即插即用。因为OBD口是汽车强制必须留出来的,主要用作车辆检测和后期的程序升级维护。
缺点:
一般只能读取车内数据,无法实现远程控制,功能有限。而且,只要车厂封掉汽车行驶时的诊断CAN通信,这种方式就没用了。
Telematics(无线通信车载系统)直连CAN总线
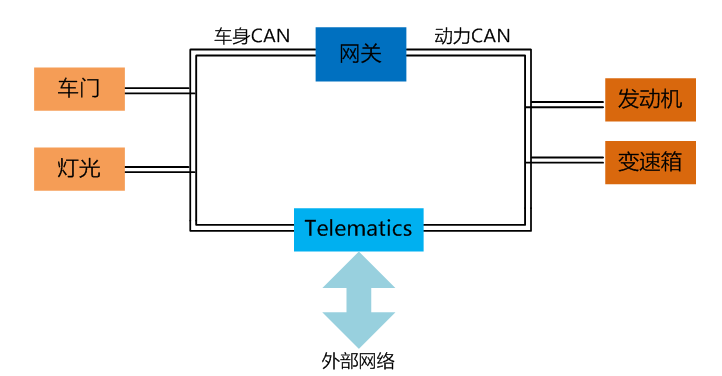
直接将具有远程通信功能的模块接入CAN总线,通过telematics模块读取各ECU的信息,并发送相应的控制信息,实现部分远程操控功能。
优点:
报文不需网关转发,信息传递直接有效,实现较为方便。
缺点:
安全性不足,一旦telematics被攻击,整车的CAN总线几乎就暴露在黑客手中。
Telematics连在CAN外网络
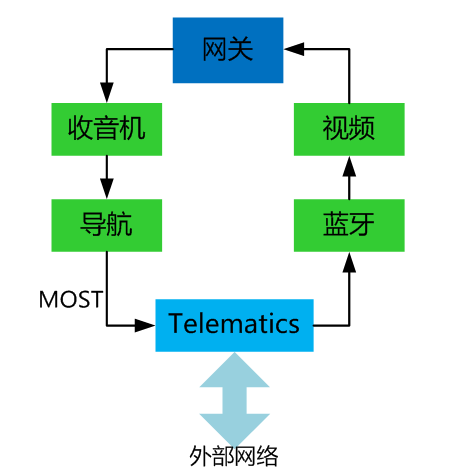
如图例子,将telematics模块加入MOST总线,直接与娱乐系统连接,并通过MOST网关转发相应的车辆信息和控制信息。
优点:
外部网络与娱乐系统高度融合,便于实现车联网娱乐和社交属性;信息需要通过MOST网关转发,安全性较高。
缺点:
MOST总线成本高,MOST网关开发难度大。
结语
这三种技术方案虽然各有优劣,但只要连入了CAN总线,在网关允许的情况下基本都能实现对车内各ECU的访问和控制,不论是车身部分还是动力部分。那为何我要将控制车身和控制动力放在两个不同的阶段呢?这一点主要是考虑到安全性问题,从技术角度看通过远程启动发动机、控制转向基本都没有障碍,但现今众多厂商极少有这么做的,大家忌惮的都是这安全性。
在智能辅助驾驶系统不成熟的情况下,将动力部分开放给车联网并没有什么明显的优势和卖点,现阶段的消费者不会因为你能远程启动而多掏钱。但是如果智能辅助驾驶技术越来越成熟,甚至出现自动驾驶,动力部分岂有不放开的理由,相应的安全性问题也会得到业界的重视。至于智能辅助驾驶系统何时才能成熟?好像还是绕不过CAN总线的瓶颈。
审核编辑:刘清
-
基于obd/t-box的车联网系统设计与应用2025-04-10 2228
-
东软T-BOX连续三年蝉联双榜第一2025-04-08 1612
-
车载T-Box逻辑功能测试方案2024-04-26 3202
-
T-BOX与通信终端市场研究分析2023-09-08 2387
-
汽车T-Box方案概述2023-04-10 4270
-
工程车辆T-Box硬件方案定制2023-03-17 3060
-
车载T-BOX中MCU和SoC通信方案(SPI通信方式)2023-01-03 5476
-
T-BOX系统解决方案深度剖析之接口2022-11-11 1236
-
细数T-BOX中TI的明星产品之CAN 收发器 | 第二节 TCAN1042-Q1:“硬核”的CAN收发器2022-10-31 906
-
基于CANoe MQTT节点仿真的T-Box远程功能自动化测试2022-08-02 3018
-
RJMU401在车载T-BOX中国密算法的流程是怎样的2021-10-22 2321
-
基于NEOWAY技术的T-Box解决方案2019-05-11 4726
-
关于T-BOX的NAD模块中的参数含义2019-03-06 11316
-
招聘4G T-BOX车载智能设备软硬件开发工程师2017-11-17 3812
全部0条评论

快来发表一下你的评论吧 !
