

基于光电管并联检测车模通过测试方案
控制/MCU
描述
一、前言
测试了利用单片机检测车模通过的方案,特别是对于单个检测点,采用 1.25kHz的脉冲,可以获得很好的检测效果。下面,对于四个检测点进行并联,验证一下检测效果。
二、电路设计
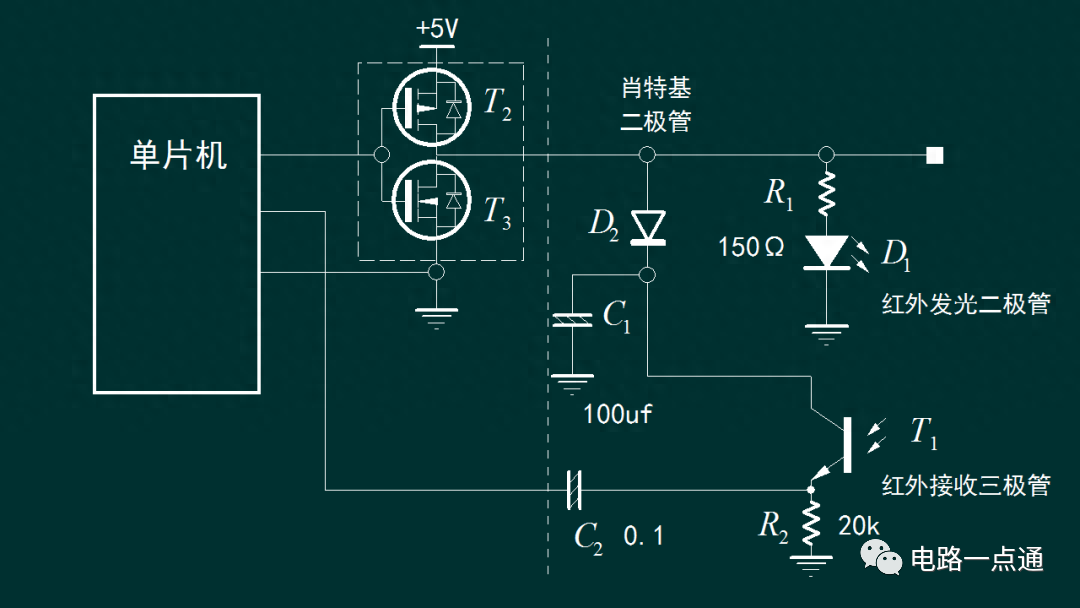
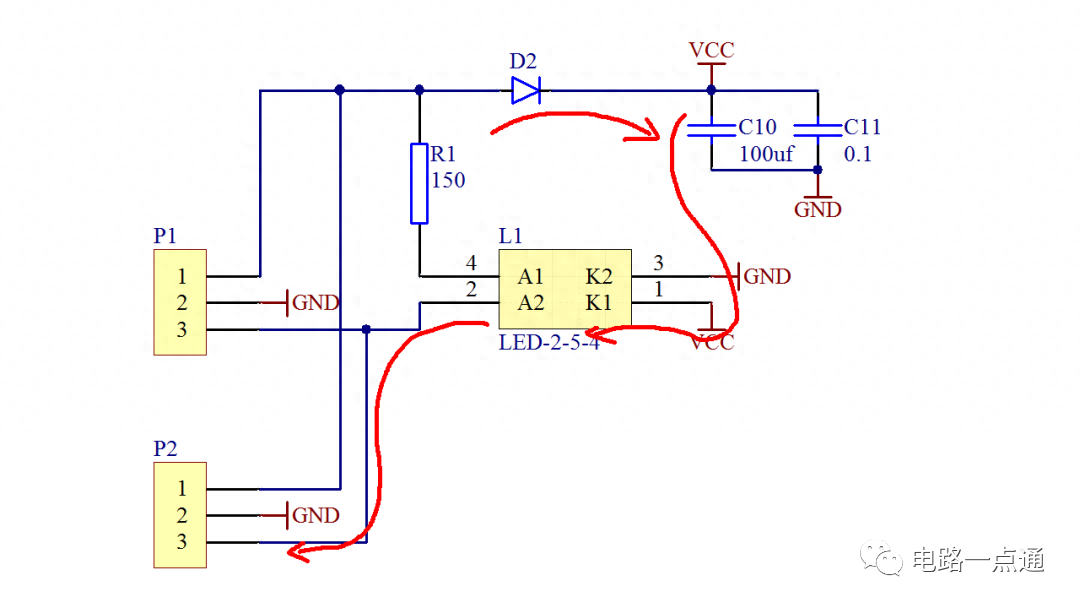
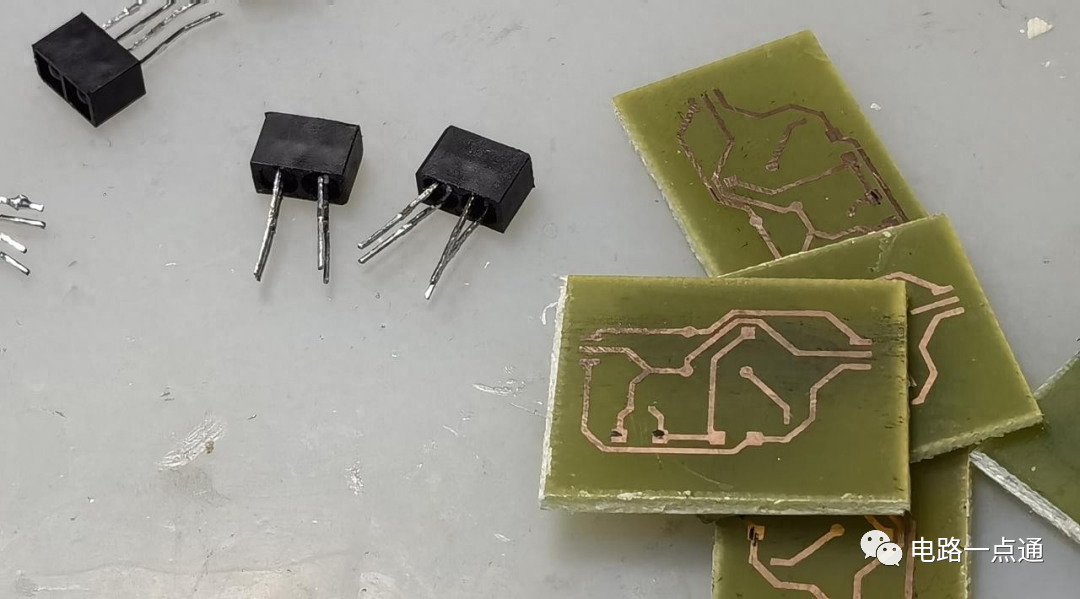
根据昨天实验结果,每个检测模块电路都是相同的。具有一进一出两个三芯接口。输入的正向脉冲通过 肖特基二极管 D2 整流之后,储能在 C10 电容上。这个电压提供给光电三极管作为工作电源。实际上,在工作中,D2,C10,C11 可以不用焊接。也可以起到同样的效果。只是噪声会大一些。设计单面电路板,便于使用一分钟制版方法进行测试。
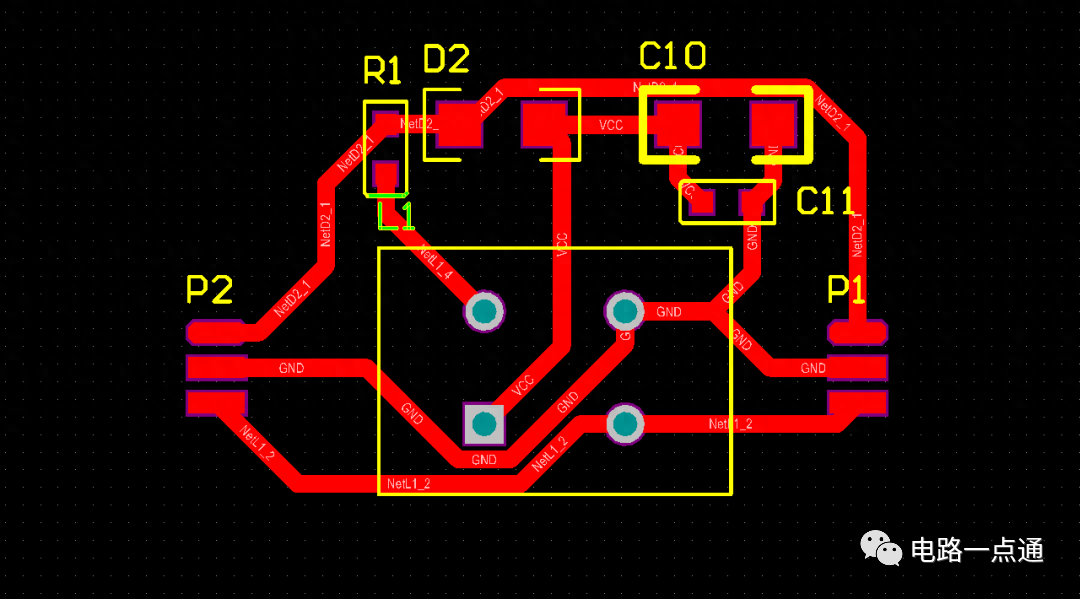
利用快速制版,制作六个模块,下面对它们进行焊接测试。初步验证这种链式检测模块的可行性。至于究竟多少块是其上限,将来再经由正式版本进行测量。
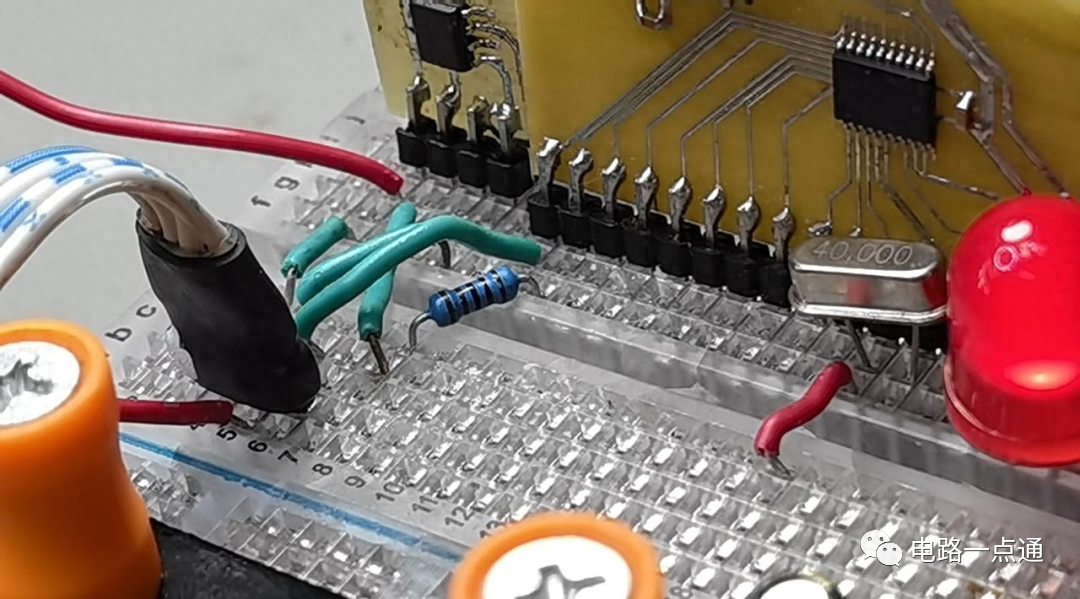
三、焊接调试
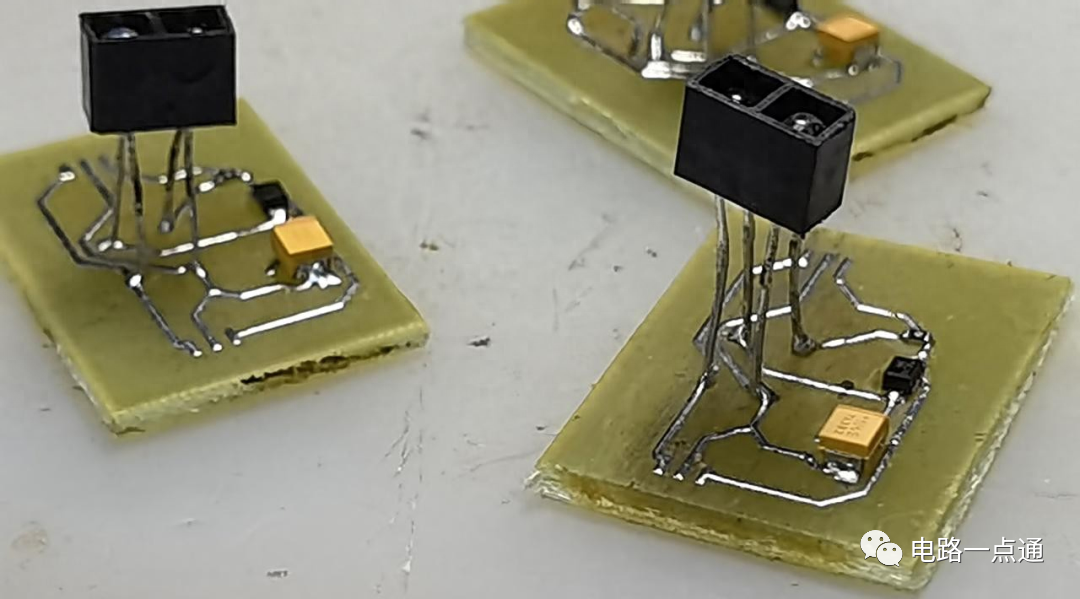
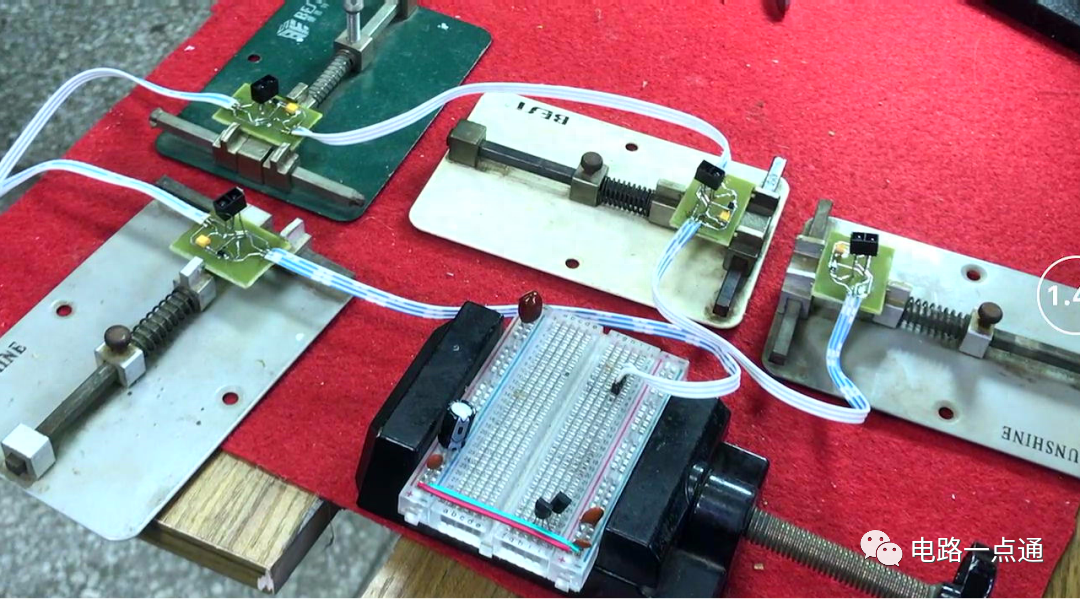
利用手边的器件,焊接测试传感器小板。总共有四个小板。下面使用排线把它们一一串联在一起。
四个焊接好的传感器模块串联在一起,将最后的接头接在面包板上,与昨天单片机模块连接在一起进行测试。
四、测试结果 在接收端,增加一个 47nF 的电容,可以减少接收数据中的噪声。可以看到反馈电流会随着光电传感器上有手掌通过,上下波动。测试每一个传感器,对于路过的手掌和车模都能够完成检测的功能。
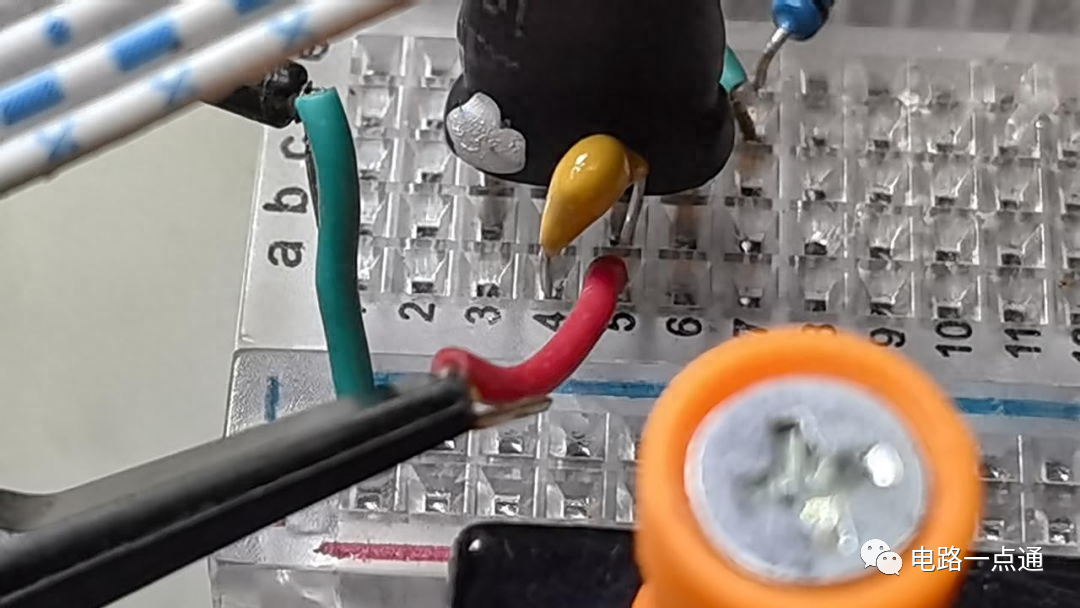
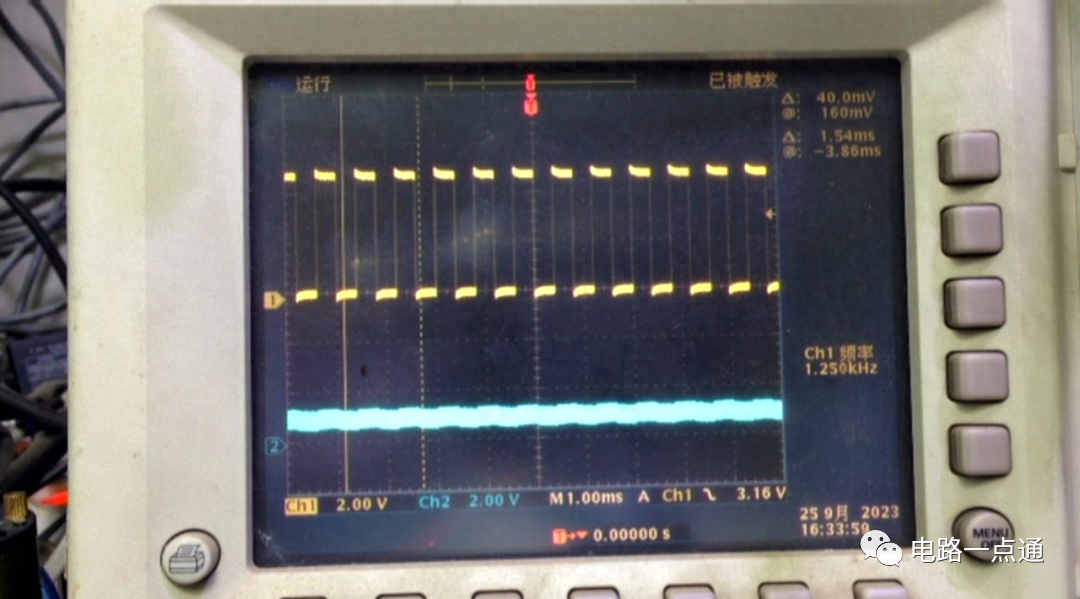
通过观察可以看到一个问题,那就是接收信号上下波动幅度减少了。信号呈现三角波形,这说明四个传感器并联,等效的带宽变小了。将脉冲频率降低八倍,可以看到波形上下波动变大了。从这里证明,光电管并联产生之后,整体反应速度降低了。在低频下,可以看到波形上下波动的幅度的确增加了。
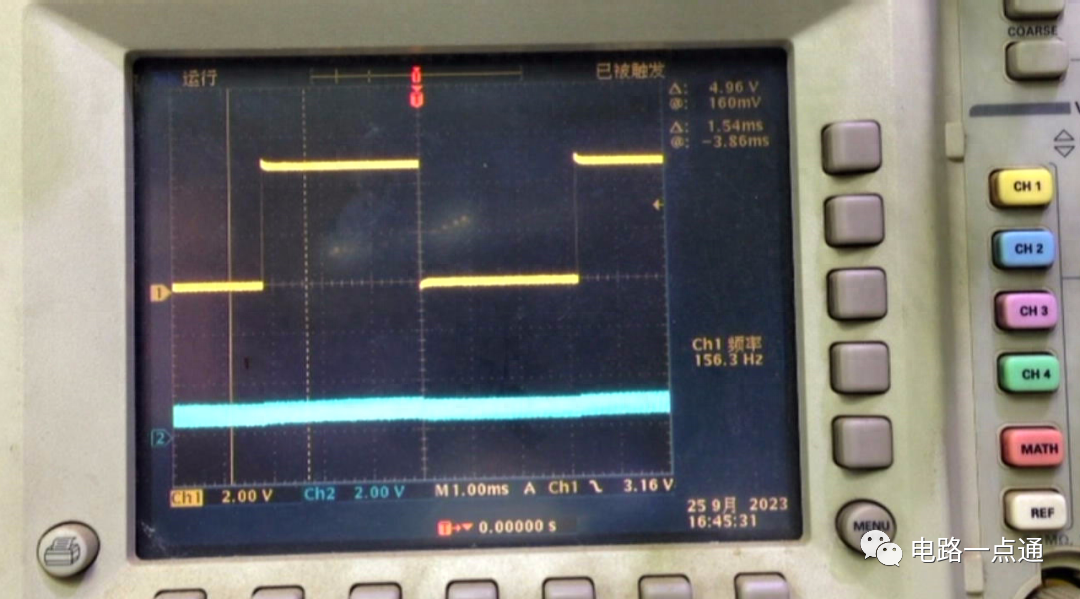
▲ 图1.4.1 测量上下波动幅度
※总 结 ※
本文对于四个基于光电管并联检测车模通过的方案进行了测试。系统的确可以工作,但是并联之后,整体传感器的响应速度降低了。这部分需要进行改进,否则无法适应高速车模通过时对应的窄脉冲。

参考资料
[1] 单片机调制解调检测车模压过: https://blog.csdn.net/zhuoqingjoking97298/article/details/133243519
编辑:黄飞
-
光电管是光敏电阻吗?2024-05-27 2573
-
光电管为什么要装在暗盒里2019-12-05 11010
-
简述光电管的工作原理_光电管伏安特性曲线2019-07-15 37174
-
如何使用光电管进行智能车模自动循线控制系统的设计2019-07-03 1373
-
紫外光电管测试电路原理图免费下载2019-06-19 1671
-
紫外光电管综合测试台有哪些主要功能2018-11-30 1154
-
光电管的资料2013-07-27 2972
-
光电管及其基本特性2010-06-16 14579
-
红外光电管电路2009-04-24 4247
-
国产光电管的技术参数2008-09-22 2120
全部0条评论

快来发表一下你的评论吧 !
