

脉冲发生器助力雷达系统开发的关键应用
描述
德思特PG1000 系列脉冲发生器允许使用图形界面和触摸屏显示器轻松创建具有不同脉冲宽度、重复率和幅度的脉冲。采用该解决方案,可以节省开发脉冲系统的时间,并将精力集中在雷达设计和测试目标上。本文将介绍脉冲信号发生器德思特PG1000系列在雷达系统开发过程中的应用。

一次脉冲雷达
主雷达产生一个照射目标物的信号,并接受其回波。根据不同的调制方式(模拟调制/数字调制)和生成雷达信号的非连续性,我们可以区分出不同类型的雷达。其中,最简单的雷达就是一次脉冲雷达,这种雷达信号不使用任何类型的调制,而是通过短时间内产生一个信号并接收由目标反射产生的回波来运行。
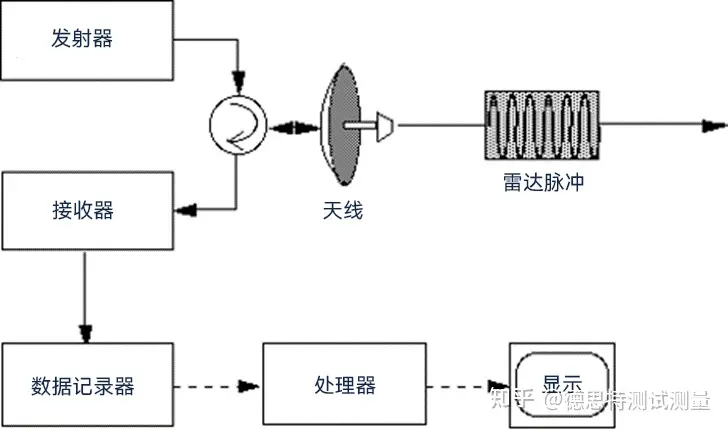
通过计算发送信号和接收回波之间的飞行时间,脉冲雷达可以确定与目标物体的距离。这种架构设计会考虑最大探测范围和分辨率之间的平衡关系。因此,增大脉冲宽度可以增加平均传输功率和最大探测范围,但与此同时,也会降低分辨率。
脉冲雷达主要应用于长距离探测控制,比如航空交通管制和天气观测(尤其是降水量观测)。

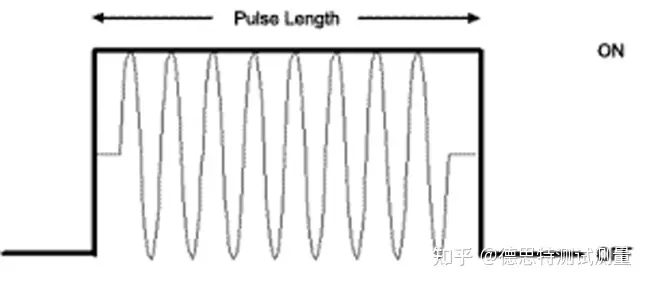
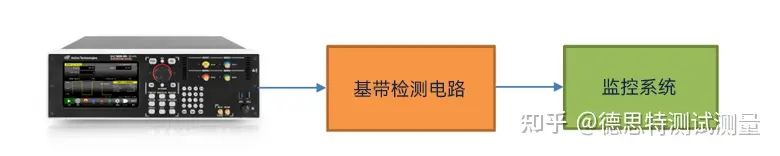
在雷达系统开发过程中,脉冲发生器产生不同持续时间的脉冲信号,可以用来供应射频调制链,以测试雷达接收器行为。
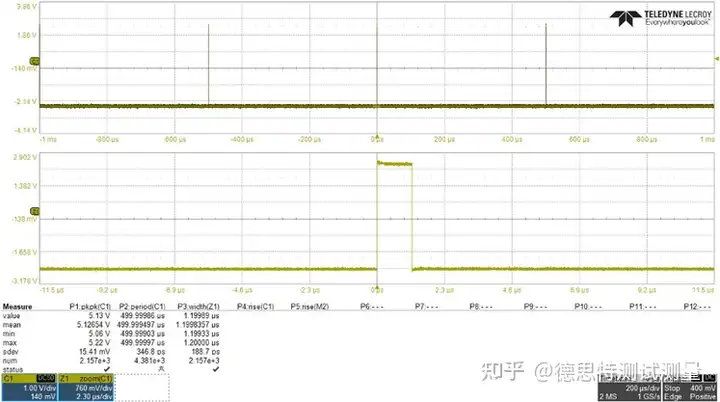
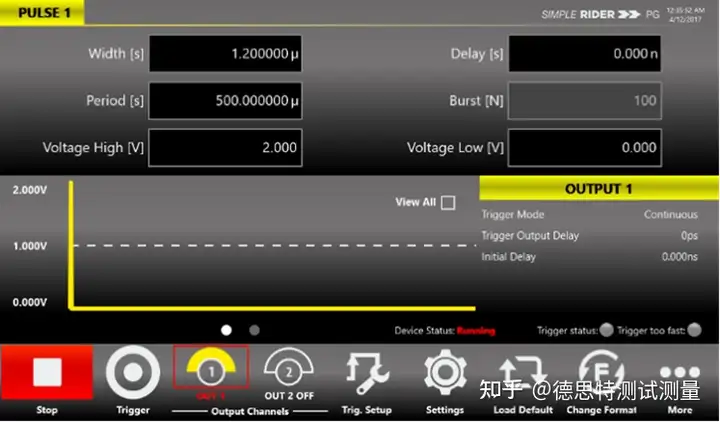
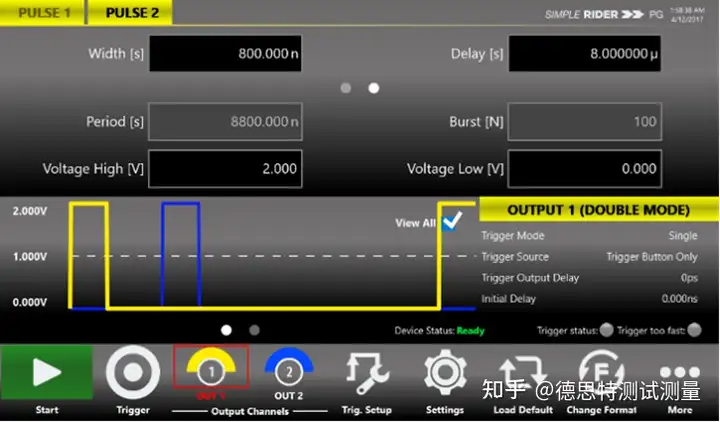
德思特PG-1000系列脉冲发生器可以通过设备图形UI界面和触摸屏幕显示,轻松地创建具有不同脉冲宽度、频率和幅度的脉冲。采用这种解决方案,可以节省开发脉冲系统的时间,研究人员可以将更多的时间精力集中在雷达设计和测试目标上。
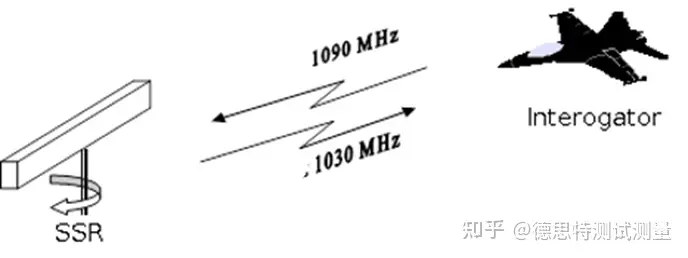
二次雷达
二次雷达是一种用于空中交通管制的特殊类型的雷达,与飞机应答设备协同工作。它使用脉冲编码询问应答器,并等待响应。根据传输的编码,二次雷达可以请求识别号、高度等信息。
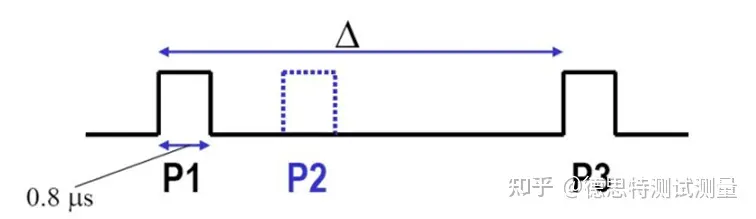
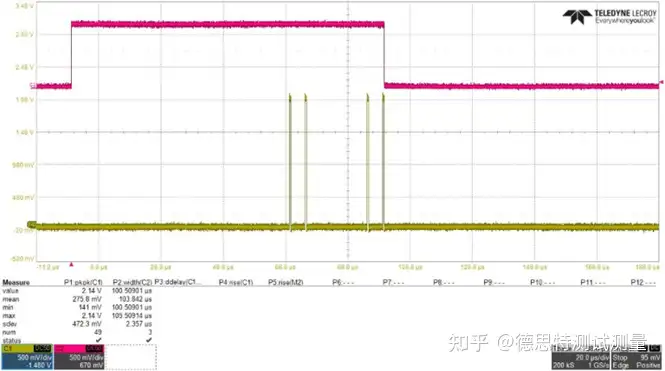
二次雷达询问基带码原理非常简单,它由3个脉冲组成,分别称为P1、P2和P3,固定持续时间为800 ns。
第一个脉冲(P1)和最后一个脉冲(P3)的时间间距由定向天线发射所决定。第二个脉冲(P2)以全向方式传输,与第一个脉冲相比延迟2 µs;这个特定的脉冲是必要的,因为定向天线发射的次级波瓣可能会击中其他转发器,导致错误的响应和干扰。应答器测量脉冲P1期间和脉冲P2期间的接收功率,并区分主天线波瓣还是次天线波瓣到达,如果是主天线波瓣的话,应答器会发送响应。
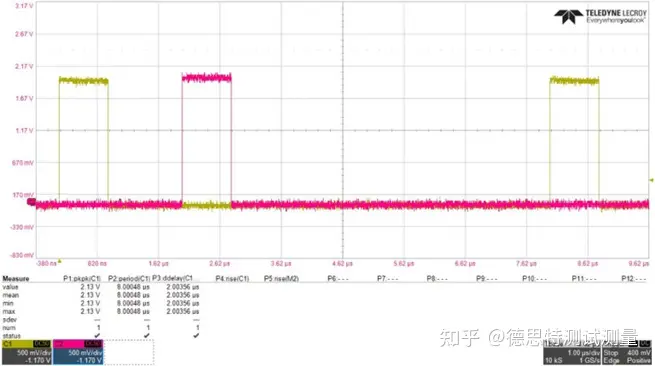
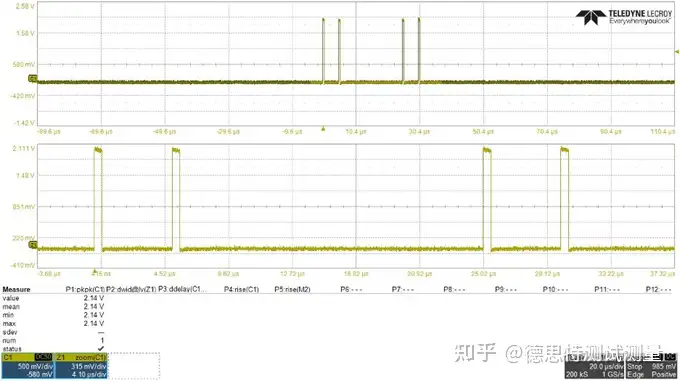
德思特PG1000系列脉冲发生器,它允许用户自定义产生不同时间间距和持续时间的双脉冲P1和P3,可以提供低至10 ps的时间分辨率。TS-PG1000系列脉冲发生器拥有多个通道输出,非常适合产生比第一个P1脉冲延迟2µs的P2。低于25ps的抖动可确保信道之间的完美同步。
使用脉冲/延迟发生器的多目标仿真
在主雷达系统中,往往通过细化系统测量信号的飞行时间,以计算雷达与目标的距离。距离计算公式为:距离(km)=(延迟时间(秒)/2)*3×10^5 km/s。其中,3×10^5 km/s是对光速的近似取值。由公式不难看出,发射信号和接收信号之间的延迟大小取决于距离长短。
在多个目标的情况下,通常会接收到多个信号,并且要求检测系统能够区分它们。
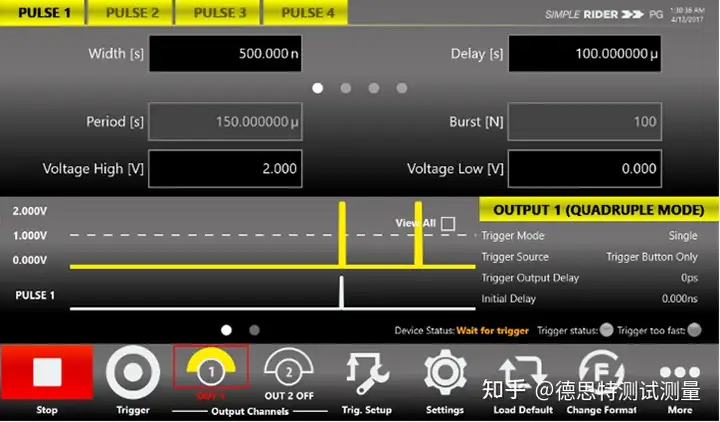
德思特PG1000系列脉冲发生器是测试雷达探测链的完美选择,这并不需要完整的雷达系统和一些真实的目标就可以完成多目标仿真测试。
德思特脉冲发生器的多脉冲模式提供具有不同持续时间和延迟的双脉冲、三脉冲和四脉冲,可重复高达125 MHz,用于测试雷达探测系统的实时频率操作。10 ps的分辨率和低于25 ps的抖动RMS提供了对射频链预期延迟进行计数,和以低于cm级别的分辨率用来模拟目标检测所需的精度。
-
脉冲发生器模块 脉冲发生器厂家 多通道脉冲发生器jf_47371611 2026-05-20
-
多功能爆速仪计时误差怎么测 #脉冲发生器 #数字脉冲发生器 #秒信号发生器 #同步天下 #信号发生器jf_16650182 2026-05-18
-
脉冲信号发生器的主要原理和组成结构2024-05-15 5541
-
信号发生器如何发出双脉冲?2023-12-21 4936
-
脉冲发生器输出是1吗?信号发生器怎么只发一个脉冲?2023-08-24 3950
-
脉冲发生器是什么2019-02-25 16241
-
脉冲信号发生器设计2018-08-21 21749
-
脉冲信号发生器原理2017-10-26 23701
-
UWB雷达脉冲信号发生器的设计2011-11-30 1246
-
逻辑脉冲发生器2009-10-05 1376
-
单脉冲发生器2009-04-03 2069
-
脉冲发生器2009-03-23 756
-
钟脉冲发生器2009-03-21 556
全部0条评论

快来发表一下你的评论吧 !
