

基于猎豹腿结构的3D打印宽量程柔性电容式压力传感器设计
MEMS/传感技术
描述
背景介绍
柔性传感器因其在可穿戴电子、人机交互和智能机器人方面的潜在应用而吸引了研究兴趣。目前,柔性压力传感器有四种主要的传感机制:电容式、压阻式、摩擦电式和压电式。柔性电容式压力传感器具有制备成本低、结构简单、灵敏度高的优点。因此,研究人员对电容式压力传感器进行了深入研究。
柔性电容式压力传感器由平行的上下电极和夹在它们之间的介电层组成。先前的研究表明,通过在柔性压力传感器的介电层内构建微观结构图案,在压力下更容易产生变形,从而提高了柔性压力传感器。同时,圆柱形结构、金字塔结构、仿生结构和砂纸结构已被用于增强柔性传感器的传感性能。然而,使用诸如砂纸结构的模具制备的传感器具有不规则的微观结构,使得难以确保由同一批次制备的压力传感器具有相似的性能。此外,由于大规模制造高灵敏度柔性传感器极具挑战性,不规则的微观结构往往导致压力传感器的耐用性相对较差。
为了制备高性能柔性压力传感器,许多研究人员致力于研究可用于柔性传感器的材料。已研究的主要柔性材料包括硅橡胶、聚二甲基硅氧烷(PDMS)和水凝胶。上述材料具有高度柔性,能够制备纳米尺寸的结构。通过使用这些柔性材料,研究人员可以实现更具创新性的结构模式。大多数电容式压力传感器使用激光技术、静电纺丝和其他转移方法来构建微观结构。尽管这些结果提供了令人印象深刻的性能,但制备过程耗时、复杂且成本高昂。
本文亮点
1. 本工作设计了一种基于仿生猎豹腿微结构的电容式压力传感器,验证了仿生微结构设计的优点,并使用3D打印技术优化了结构特征参数。
2. 受猎豹腿型启发的压力传感器具有高灵敏度(0.75 kPa⁻¹)、宽线性传感范围(0–280 kPa)、约80 ms的快速响应时间和出色的耐用性(24000次循环)。
3. 该传感器可以识别手指操作的鼠标,监测人体运动,并传输莫尔斯电码信息。
图文解析
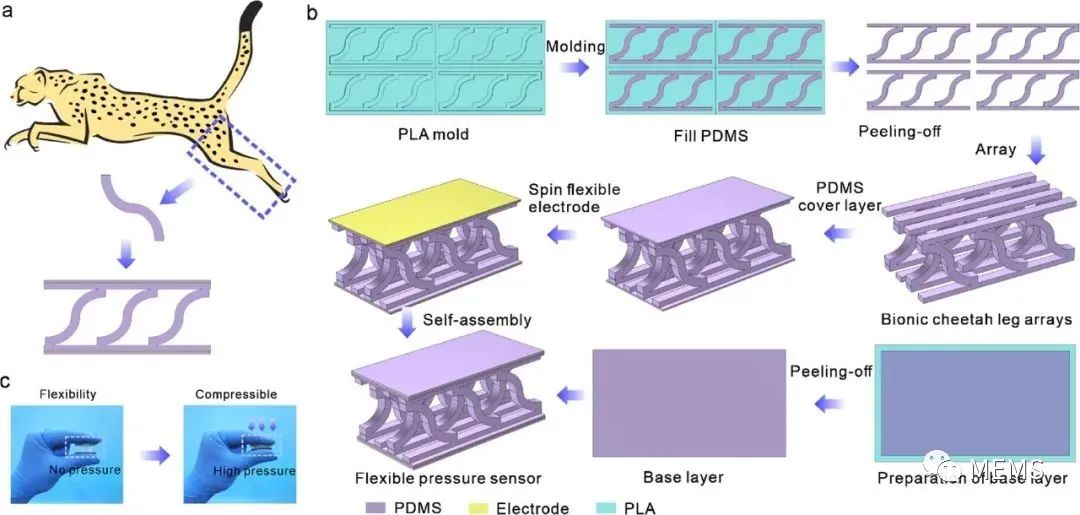
图1(a) 压力传感器结构灵感。(b) 压力传感器准备流程图。(c) 压力传感器示意图。
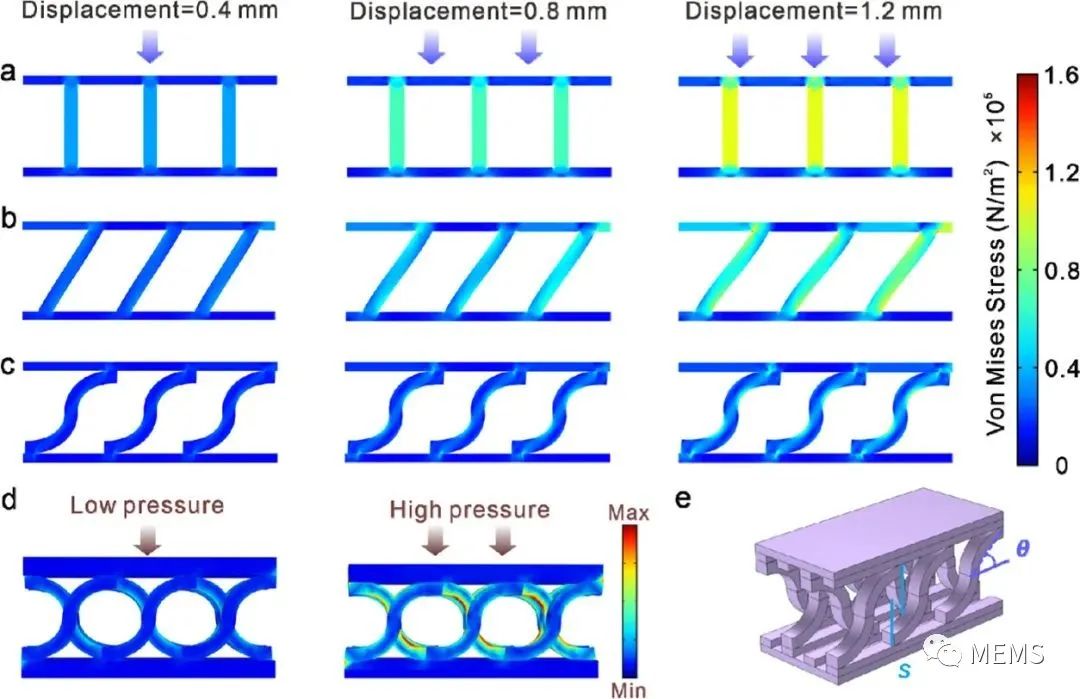
图2 压力传感器的模拟。不同位移下的应力分布:(a)微圆柱,(b)倾斜微圆柱,和(c)仿生猎豹腿。(d) 压力传感器在低压和高压下的三维应力分布。(e) 传感器优化参数示意图。
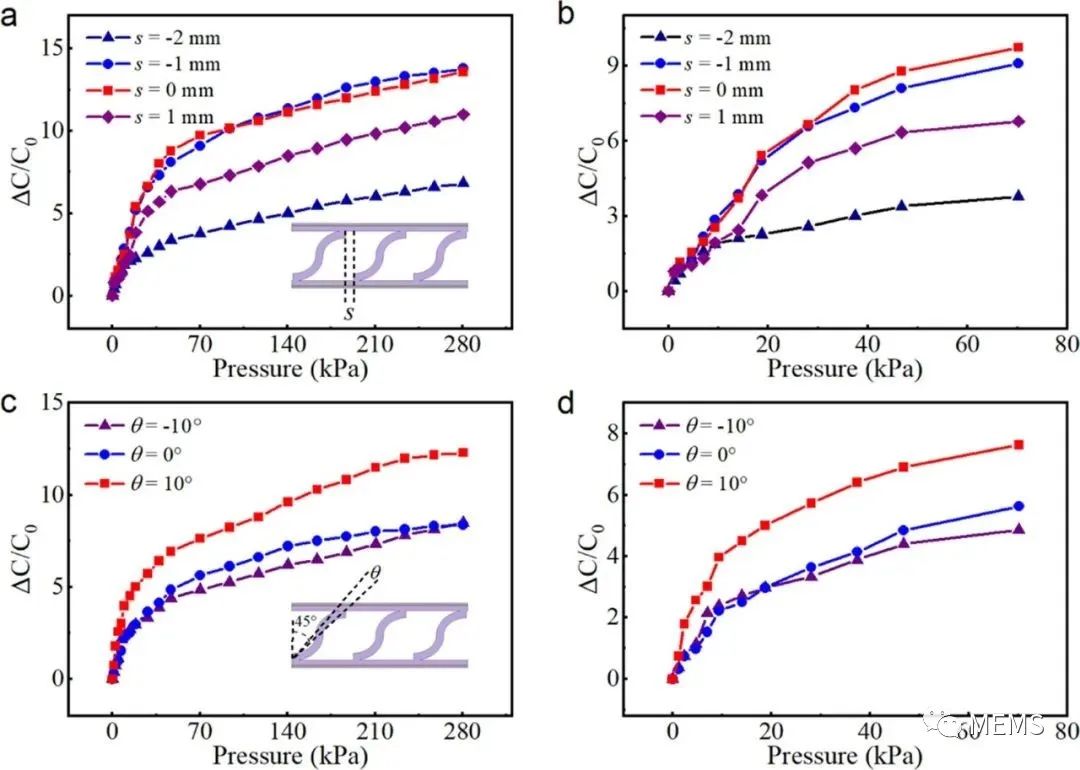
图3(a,b)仿生微结构的间距对柔性传感器灵敏度的影响。(c,d)仿生微结构的倾斜角度对柔性传感器灵敏度的影响。
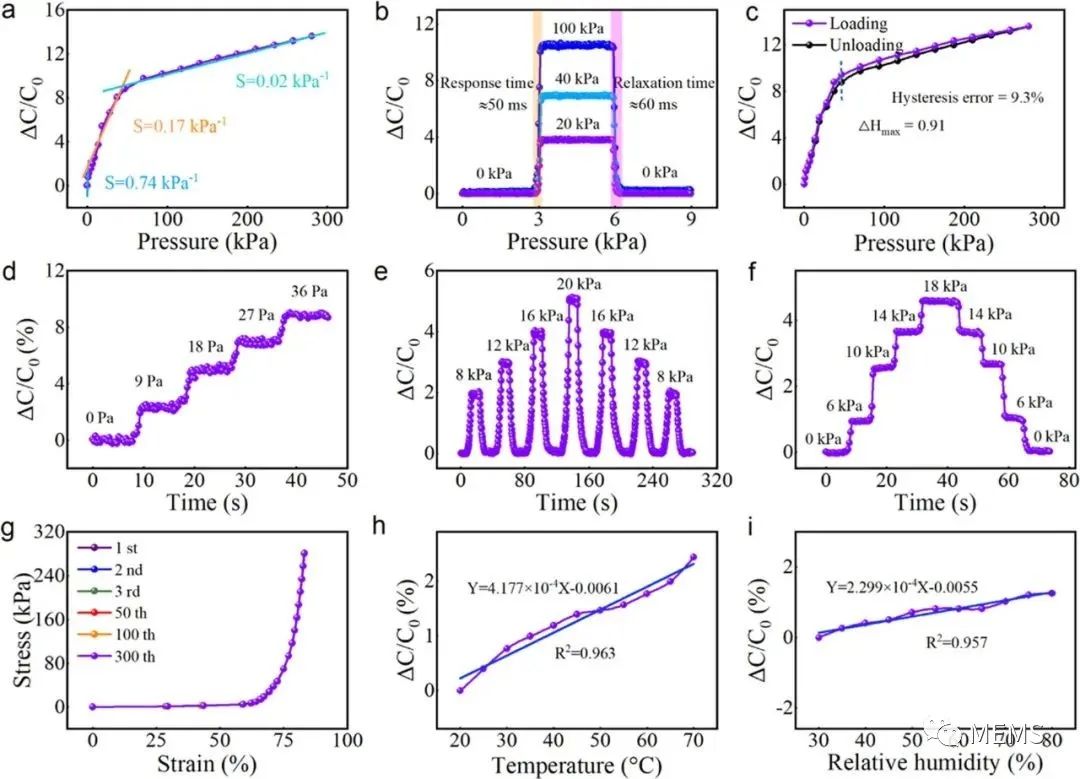
图4 压力传感器的特性表征。(a) 压力传感器电容响应曲线。(b) 压力传感器在20、40和100 kPa压力下的响应/恢复时间分别为80和90 ms。(c) 压力传感器的滞后误差为9.3%。(d)柔性传感器的低压检测。(e) 柔性传感器的可重复性。(f) 柔性传感器在不同压力下的稳健性。(g) 柔性传感器的应力-应变曲线。(h) 柔性传感器的温度性能扰动试验。(i) 柔性传感器的湿度干扰测试。
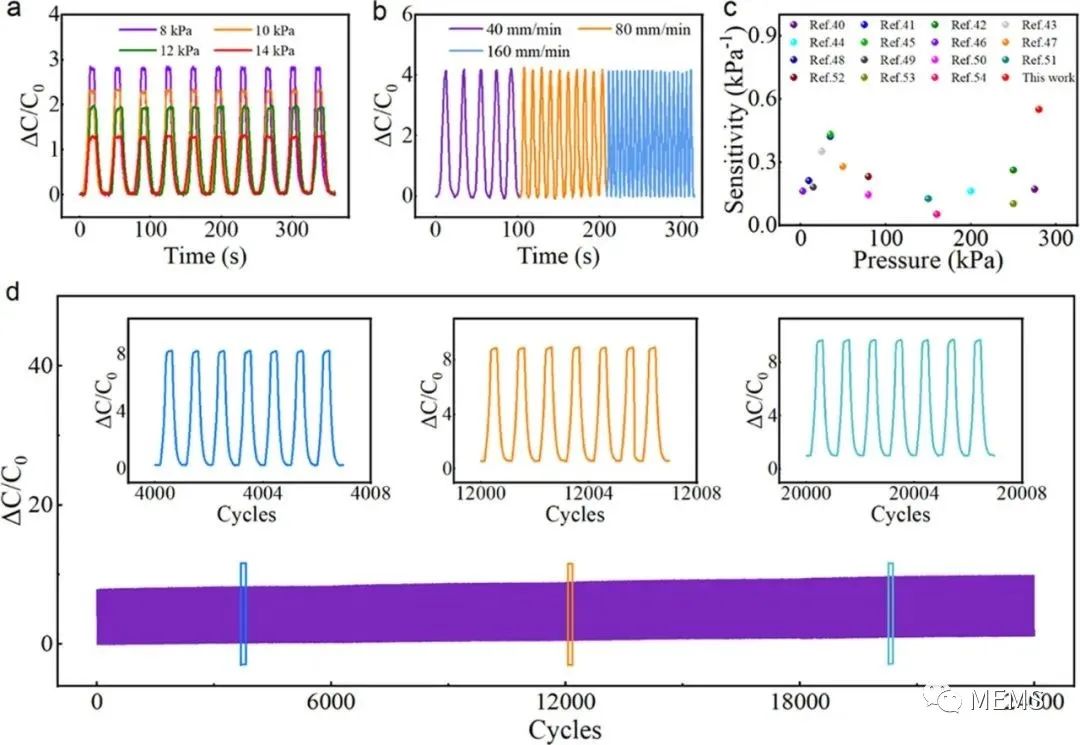
图5 压力传感器的性能表征。(a) 电容式压力传感器在不同压力(8、10、12和14 kPa)下的电容响应的重复性。(b) 传感器在不同速率(40、80和160 mm/min)下的电容响应。(c) 将电容式压力传感器的灵敏度和量程与现有研究进行了比较。(d)电容式压力传感器24000次循环的耐久性测试。
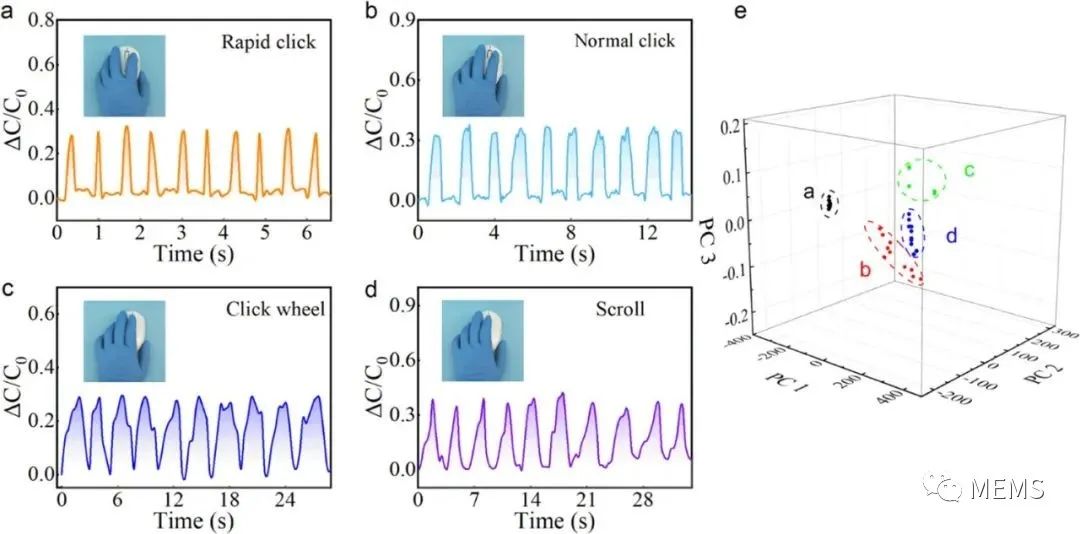
图6 用于手指操作鼠标运动识别的压力传感器应用程序。(a) 鼠标快速点击响应曲线。(b) 正常速度点击鼠标响应曲线。(c) 快速点击轮响应曲线。(d) 滚动鼠标滚轮响应曲线。(e) 四个手指操作的鼠标动作的三维PCA聚类。
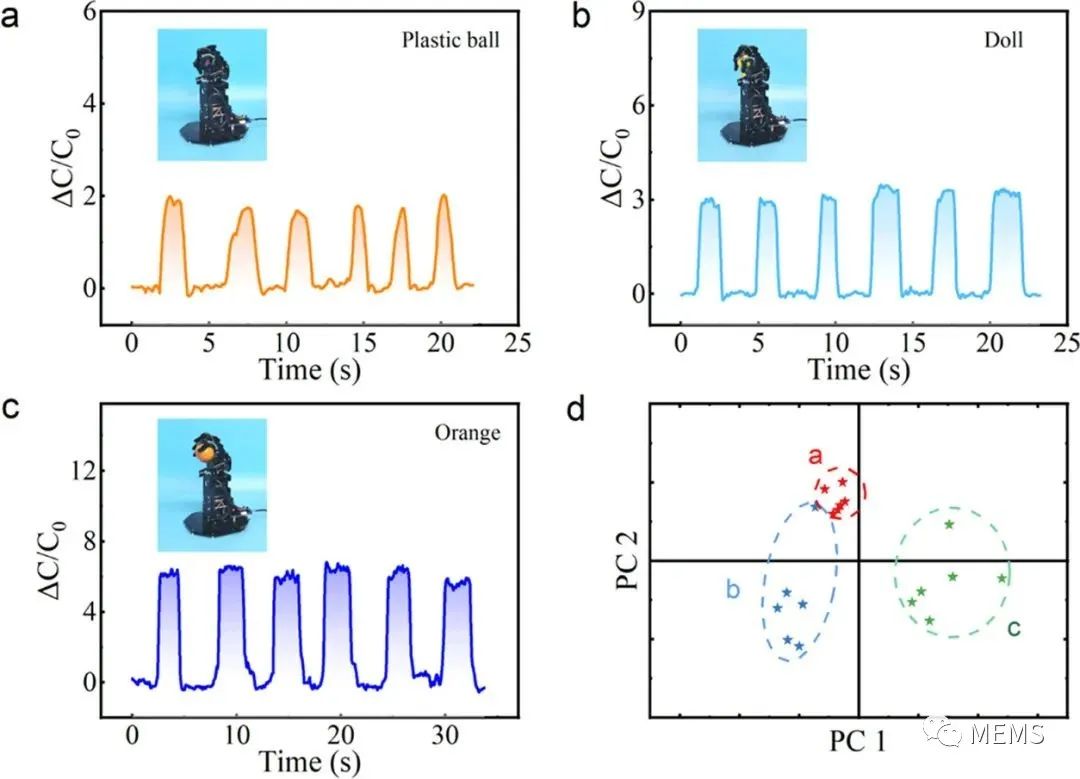
图7 压力传感器在智能操纵器中用于抓取对象。(a) 夹紧塑料块。(b) 抓着一个娃娃。(c) 抓着一个桔子。(d) 智能机械手抓取物体的二维PCA分类。
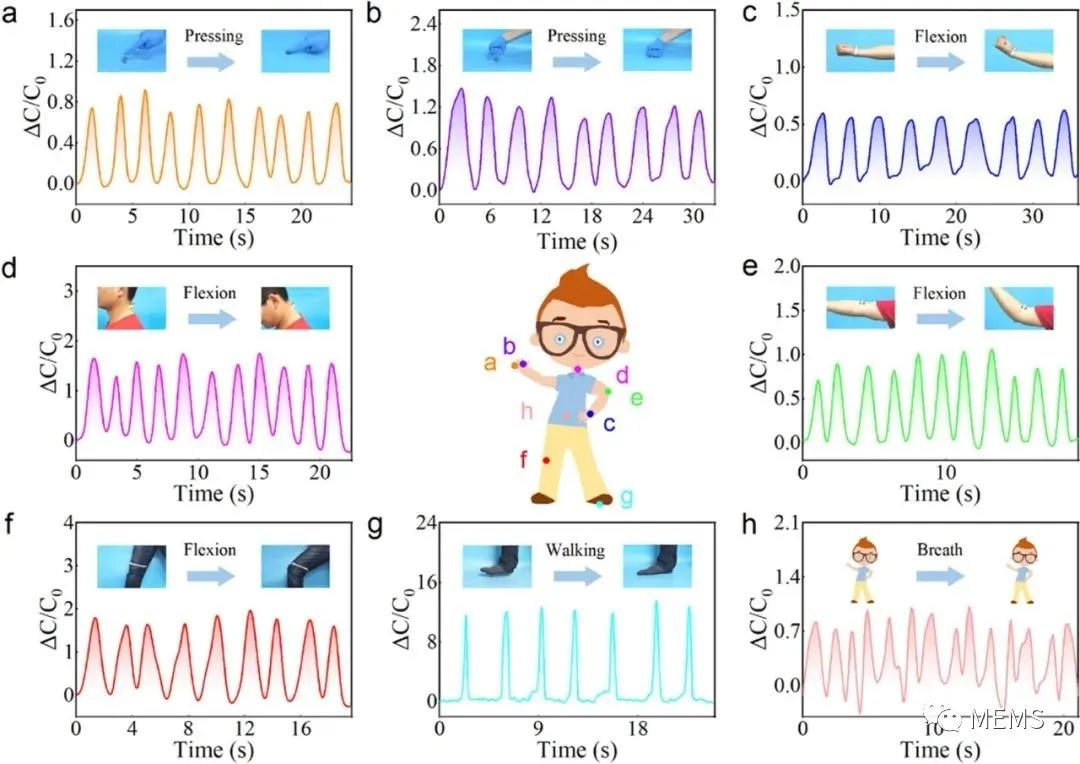
图8 用于人体运动监测的压力传感器。(a) 手指点击。(b) 拳头按压。(c) 手腕弯曲。(d) 颈部弯曲。(e) 肘部弯曲。(f) 膝盖弯曲。(g) 脚部压力。(h) 呼吸。
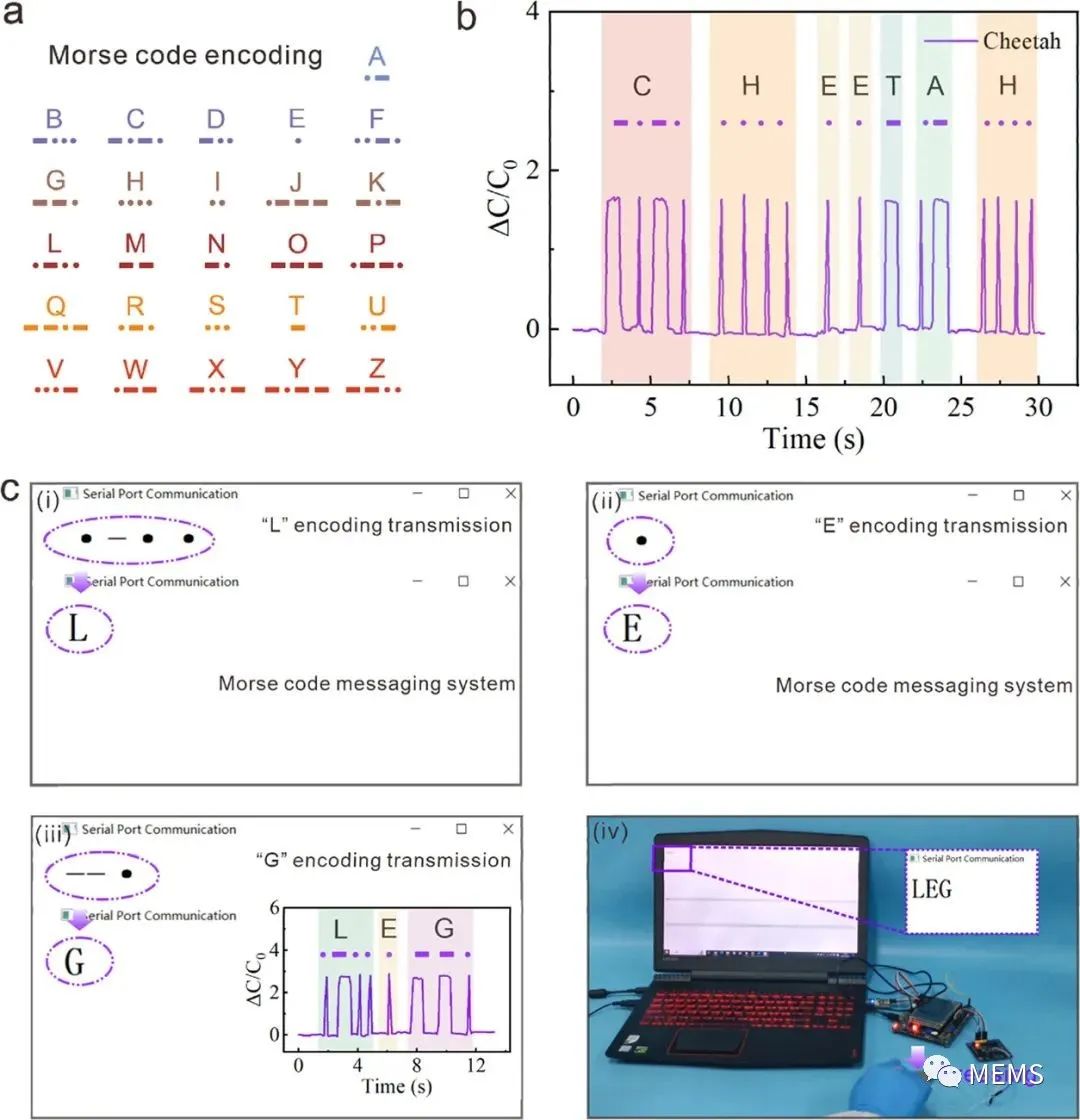
图9 压力传感器用于传输莫尔斯电码信息。(a) 这26个字母对应莫尔斯电码。(b) 压力传感器传输莫尔斯电码信息“猎豹”。(c) 压力传感器的计算机接口显示发送莫尔斯电码信息“LEG”。
审核编辑:刘清
-
基于高温的微型压力传感器设计方案2018-11-12 2226
-
怎么实现基于CAV424的电容式压力传感器测量电路设计2021-05-06 2189
-
常见的压力传感器的分类及特点2021-08-05 1804
-
基于神经网络的电容式压力传感器非线性校正2009-07-09 781
-
电容式压力传感器2008-01-07 3463
-
电容式薄膜真空压力传感器设计_王凡2017-03-19 1262
-
采用环形岛棱结构的电容式压力传感器2021-04-08 1245
-
利用3D打印技术开发新型多方向的压力传感器2021-07-30 1801
-
压力传感器的分类 各种压力传感器的原理2023-01-16 7009
-
MEMS电容式与压阻式压力传感器的区别(下)2023-08-18 7861
-
用于柔性压力传感器的基于肖特基效应的高单位面积电容界面研究2024-02-29 2999
-
如何选择压力传感器量程?如何选择压力传感器接头?2024-03-20 3574
-
电容式压力器分为哪三种2024-08-07 2418
-
电容式压力传感器的工作原理及应用2024-10-21 6213
-
电容式MEMS压力传感器有哪些优点?纯国产电容式MEMS压力传感器芯片有哪些?2025-04-09 2295
全部0条评论

快来发表一下你的评论吧 !
