

机器视觉技术之空域图像增强技术解析
机器视觉
描述
一、图像处理技术概述
1.定义
对原始获取图像进行一系列的运算处理,称为图像处理。图像处理是机器视觉技术的方法基础,包括图像增强、边缘提取、图像分割、形态学处理、图像投影、配准定位和图像特征提取等方法。
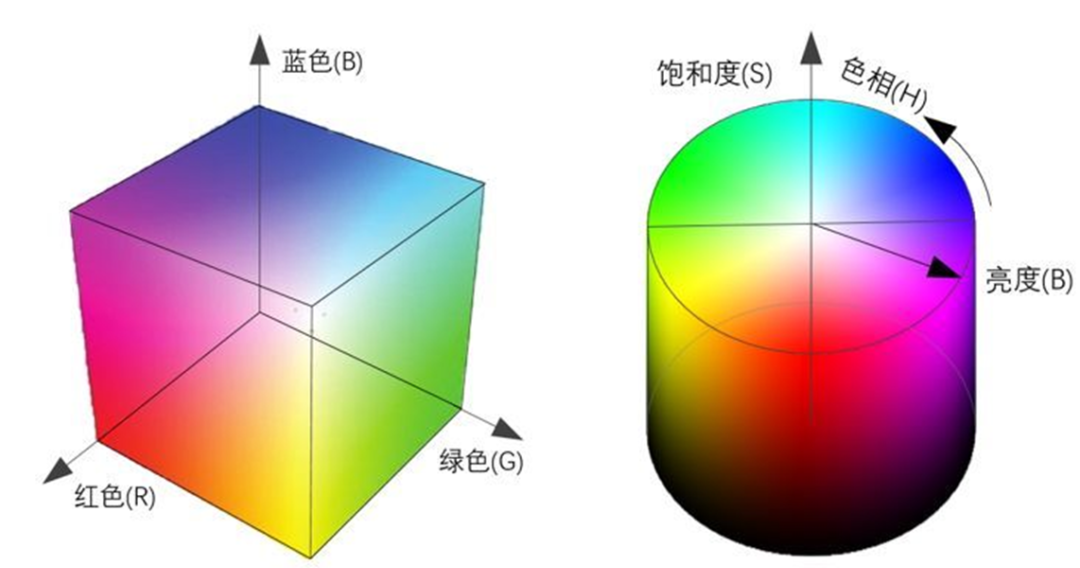
2.颜色的基本定义
GB 5698-85,颜色定义为:色是“光作用于人眼引起除形象以外的视觉特性”。
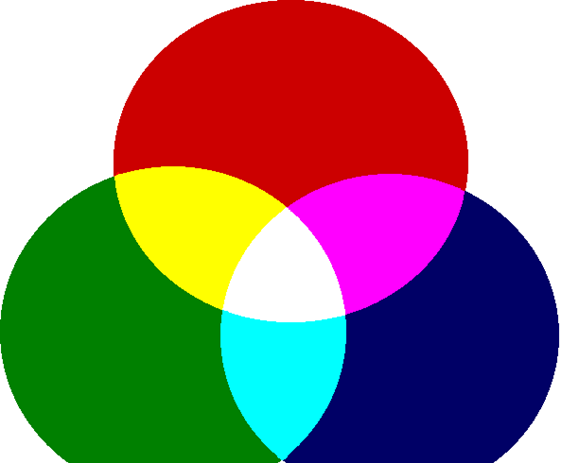
3.三原色(tricolor)
二、图像增强概述
1.改善图像质量两类方法
•不考虑图像降质原因——图像增强技术
•针对图像降质原因——图像还原技术
2.图像增强技术两类方法:
(1)空间域法: 在空间域中对图像的各个像素灰度值直接进行计算处理;
(2)频率域法: 在图像的频率变化域中对图像的变换值进行某种运算处理,然后再变回空间域中。
三、空域图像增强
1.定义
空域法是直接对图像中的像素进行处理,以图像的灰度映射变换为基础。
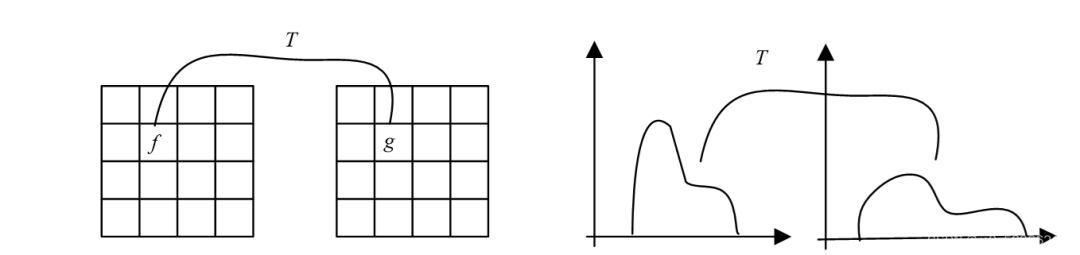
点对点变换 直方图修正
2.空域变换增强
直接灰度变换:
图像求反:
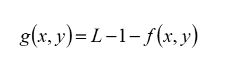
用这种方式倒转图像的强度产生图像反转的对等图像。该方式适用于增强嵌入于图像暗色区域的白色或灰色细节,特别是当黑色面积占主导地位时。
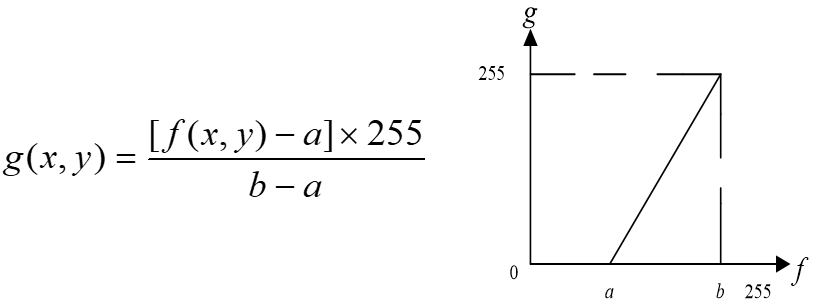
线性灰度增强:

线性最大增强:
3.空域变换增强的MATLAB实现
rgb=imread(‘ic.png’);%读取图像 gray=rgb2gray(rgb); % 色彩转换成灰度 gray2=a* gray+b; % 灰度线性变换 gray3=255-gray;求反操作 subplot(141),imshow(rgb),title(‘原图’);%显示原图像 subplot(142),imshow(gray),title(‘灰度图’);%显示灰度图像 subplot(143),imshow(gray2),title(‘灰度图2’);%显示变换灰度图subplot(144),imshow(gray3),title(‘灰度图3’);%显示求反灰度图
函数说明:图像增强函数
调用格式: ImageEnhance ( image_origin , image_edge , kind)
参数说明:
image_origin:输入图像(灰度图)
image_edge:输出图像
kind:算法类型(包括POINTLINER,POINTSHARP)
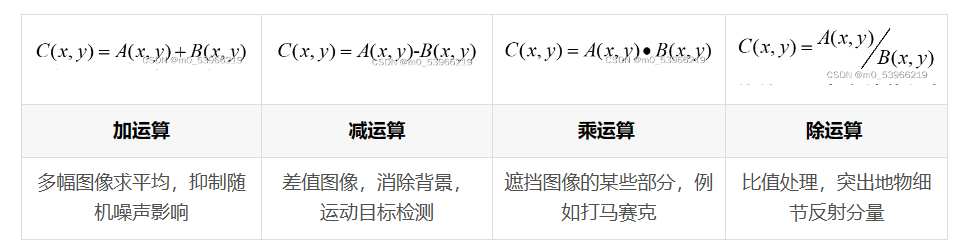
4.图像代数运算
包括加、减、乘、除运算。
5.椒盐噪声(salt-and-pepper noise)
椒盐噪声又称脉冲噪声,它随机改变一些像素值,在二值图像上表现为使一些像素点变白,一些像素点变黑。是由图像传感器,传输信道,解码处理等产生的黑白相间的亮暗点噪声。
椒盐噪声往往由图像切割引起,去除脉冲干扰及椒盐噪声最常用的算法是中值滤波。
6.空域滤波增强
主要有两类:
(1)平滑(低通)滤波器
(2)锐化(高通)滤波器
7.平滑滤波器
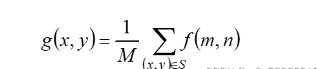
(1)均值滤波
(2)带有阈值的均值滤波

(3)中值滤波
中值滤波的基本原理是将像素邻域内灰度的中值代替该像素的值。
中值滤波的步骤:
1.将模板在图中漫游,并将模板中心与图中某个像素位置重合;
2.读取模板下各对应像素的灰度值;
3.将这些灰度值从小到大排成1列;
4.找出这些值里排在中间的1个;
5.将这个中间值赋给对应模板中心位置的像素。
中值滤波特点:
1.非线性滤波。
2.可克服图像的边缘模糊。
3.对滤除脉冲干扰及图像扫描噪声最为有效。
4.不需要图像的统计特性。
5.对一些细节多,特别是点、线、尖顶细节多的图像不宜采用。
(4) 高斯滤波
高斯滤波器是一类根据高斯函数的形状来选择权值的线性平滑滤波器,其对于抑制服从正态分布的噪声非常有效。
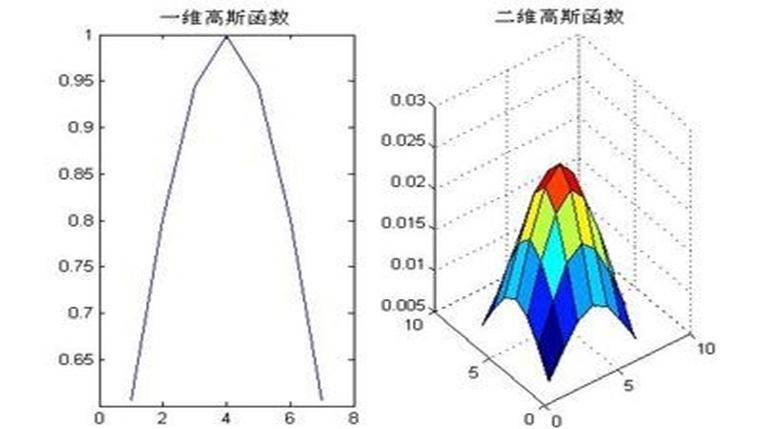
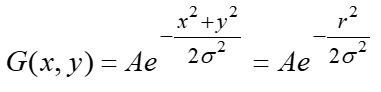
二维零均值高斯函数
gausFilter = fspecial('gaussian',[m,n],sigma)
blur=imfilter(grayImg,gausFilter,'replicate')
版权声明:本文为CSDN博主「liutangplease」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:
https://blog.csdn.net/m0_53966219/article/details/127803603
声明:部分内容来源于网络,仅供读者学习、交流之目的。文章版权归原作者所有。如有不妥,请联系删除。 —THE END—
原文标题:机器视觉(四):空域图像增强
文章出处:【微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
-
机器视觉之图像增强和图像处理2023-10-23 4165
-
机器视觉:图像处理技术、图像增强技术2023-10-20 5934
-
#硬声创作季 机器视觉技术与应用:图像的直方图增强Mr_haohao 2022-10-26
-
四元数数控:深圳机器视觉技术是图像处理吗?2021-12-23 845
-
机器视觉中的图像增广技术综述2021-06-03 984
-
浅谈相关机器视觉图像处理技术2021-03-30 4726
-
机器视觉系统技术简介!(干货分享建议收藏)2019-12-17 3529
-
感受技术之美!了解机器视觉的典型架构与应用领域2019-08-16 2764
-
贴片机中的现代视觉与图像识别技术2018-09-03 3183
-
基于空域的点运算和领域去噪算法对图像增强处理2017-11-15 939
-
机器视觉表面缺陷检测技术2016-01-20 6592
-
机器视觉技术2016-01-17 5510
-
机器视觉系统核心技术之数字图像处理2013-11-27 4554
全部0条评论

快来发表一下你的评论吧 !
