

运动控制器关于电流环、速度环、位置环的优化
伺服与控制
描述
控制器优化的关键在于以下几个方面。
(1)动态特性
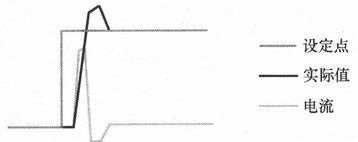
动态特性的衡量标准为频响特性的带宽以及对于阶跃信号的动态响应时间,如下图所示。
可以通过更短的采样周期与更高的控制器的比例增益来提高系统的动态特性。
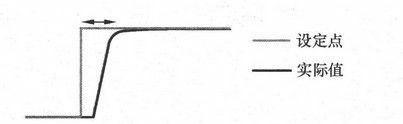
系统阶跃响应(一)
(2)稳定性
可以通过开环特性的幅值与相角裕量来判断系统的稳定性,同时也可以通过超调的大小来判断系统的稳定性,如下图所示。
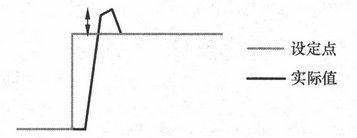
系统阶跃响应(二)
小的控制器比例增益有助于提高系统的稳定性,由此可见,系统的动态特性与稳定性是相互矛盾的。在调试过程中,应在保持系统稳定性的前提下尽量提高其动态特性。
(3)精度
可以通过开环特性的低频高比例增益来提高精度。系统的静态误差与跟随误差越小,精度越高,如下图所示。
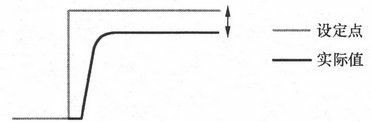
系统阶跃响应(三)
控制器的积分可以用来消除系统的静态误差,同时比例增益越大,精度越高。
(4)系统鲁棒性
鲁棒性是指在运行条件发生变化时,系统保持稳定性与动态特性的能力,如下图所示。其中包括:
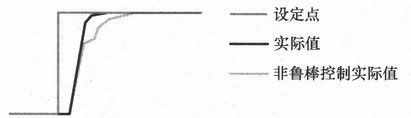
系统阶跃响应(四)
①机械特性发生变化;
②电机特性由于温度引起的变化等。
影响系统鲁棒性的因素有很多,如驱动器的输出能力、系统的稳定性等。
(5)控制信号限制
由于电机以及驱动器输出能力的限制,因此要考虑控制信号的限制,如下图所示。例如在设定负载的加速度时,就要考虑其加速扭矩是否已经超出了驱动器或者电机的驱动能力。
系统阶跃响应(五)
(6)抗干扰与抗噪声能力
①低频扰动,由交叉耦合或摩擦引起,主要解决方法有以下两种:
低频高比例增益;
积分与滤波器。
②高频噪声,由电机与机械谐振引起,主要解决方法有以下两种:
高频低增益;
滤波。
电流环、速度环、位置环的优化
通常情况下,伺服系统由电流环、速度环以及位置环组成,3个闭环是由内到外互相包容的。也是就说,速度环包含电流环,而位置环又包含速度环。在极少数场合中,还会遇到只有位置环与电流环的情况,不过只是在特殊应用中。典型的三环控制回路如下图所示。
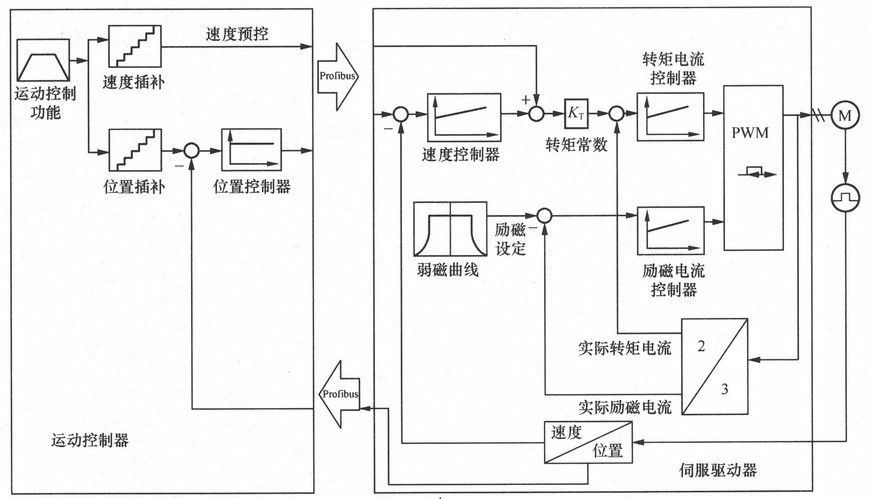
三环控制回路
在优化过程中,建议按照由内到外的顺序,即先优化电流环,再优化速度环,最后整定位置环参数。在伺服驱动中,电流控制器的参数是根据电机的参数确定的,包括电机的额定电流、转矩常数等。而在电流控制器的反馈通道上,用到电机的模型,里面涉及电机的感抗及阻抗等参数。因此说,电机参数的准确与否对电流环的参数起着重要的影响。
当用SinamicsS120对西门子电机进行控制时,仅仅需要核对电机的序列号,电流控制器参数会自动默认。如果用S120驱动第三方电机,就需要认真核对电机的每个参数,并需要对电机进行静态识别。对于电流环特性的衡量,可以通过伯德图来进行判断,通常情况下,电流环的带宽要求在1000Hz左右。需要注意的是,电流环的特性不是越硬越好,因为在电流环的外层还有速度控制环,在速度控制器输出的急剧调整状况下,过硬的电流环特性会导致系统不稳定。
使用过程中,需要大力调整的控制器是速度控制器,在对电流环进行整定的基础上,速度环的比例增益与积分时间是最关键的整定参数,也是使用最频繁的参数。根据控制器优化标准及方法,可以对速度控制器进行整定。整定的原则就是在保证系统稳定性的基础上,将动态特性调整到最高。一些高性能伺服驱动器为用户提供了自动优化的功能,自动优化的过程中需要测量电机与负载的惯量,对电流环参数进行识别,最后给出优化后的速度控制器参数。但是由于充分地考虑系统的稳定性,自动优化的结果都是比较保守的参数,因此用户可以在自动优化的基础上再对控制器参数进行手动调整。参考的依据是系统的伯德图或者是阶跃响应。一般情况下,要保证速度环的带宽在100~200Hz。
在对电流环与速度环进行优化之后,可以以一定的频率转动电机,检查其运行的平稳性。最后就是对于位置控制器的整定。对于位置控制器,多数场合系统默认的都是比例控制,没有积分与微分环节。对于比例增益,推荐的方式是从一个较小的值逐渐向大调整,直到满足系统定位精度的要求。
编辑:黄飞
-
云台电机驱动板电流环、速度环、位置环参数解析2026-03-03 1073
-
变频器参数的电流环与速度环调节方法2025-06-07 2946
-
变频器参数的电流环速度环该如何调节?2024-07-15 15459
-
假如伺服电机一键优化没有达到理想的效果,电流环、速度环和位置环该如何调节呢?2024-01-09 1893
-
位置环与速度环,电流环的差别是什么?2023-12-20 1337
-
MyRio实现电机的速度环与位置环控制2022-05-05 13669
-
负反馈PID调节系统之电流环、速度环和位置环有什么关系2021-10-13 2467
-
电流环控制器的优化过程是怎样的2021-10-11 1288
-
伺服电机速度环、位置环、扭矩环的控制原理是什么?2021-09-29 1116
-
伺服电机电流环、速度环和位置环之间是什么关系?2021-09-28 9338
-
伺服电机电流、速度、位置环控制相关资料分享2021-06-28 2338
-
电动汽车用PMSM控制的速度环,电流环分别有什么作用?2016-09-15 10751
-
电机的速度环和电流环怎么换算的?2016-01-18 9672
全部0条评论

快来发表一下你的评论吧 !
