

slamware自主定位导航解决方案赋能机器人智能移动
描述
上篇,小岚为大家介绍了slamware自主定位导航解决方案在移动生态、开发便利性、智能性上探索的成果,那背后到底是哪些关键技术在赋能呢?
机器人在未知场景中,要想实现类人般的智能移动,必须要具备地图构建及导航能力。地图的好坏,直接影响机器人在环境中的定位和导航能力 。
为了帮助机器人适应多种应用环境,思岚优化了软件算法、强化了建图引擎,让机器人在复杂、大面积的场景下也能轻松应对,稳定发挥,完成定位导航任务。
1、 最大25万㎡+大场景稳定建图和更新
2、 复杂场景下的融合定位技术
3、 多传感器融合数据接入、处理
4、 内置异常处理与故障恢复机制
5、 完整的工具链支持
6、 丰富的开发生态和软件支持
最大25万㎡+大场景稳定建图和更新
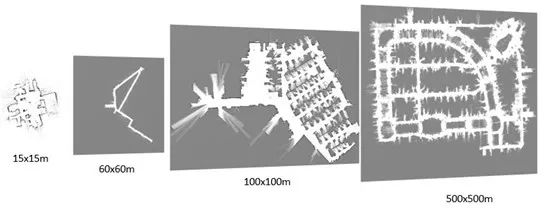
主动回环闭合纠正,超大场景建图
得益于SharpEdge图优化建图技术,思岚科技的slamware算法能帮助机器人实现最大25万㎡的地图构建能力,同时拥有主动式回环闭合纠正能力,能很好的消除长时间运行导致的里程累计误差。
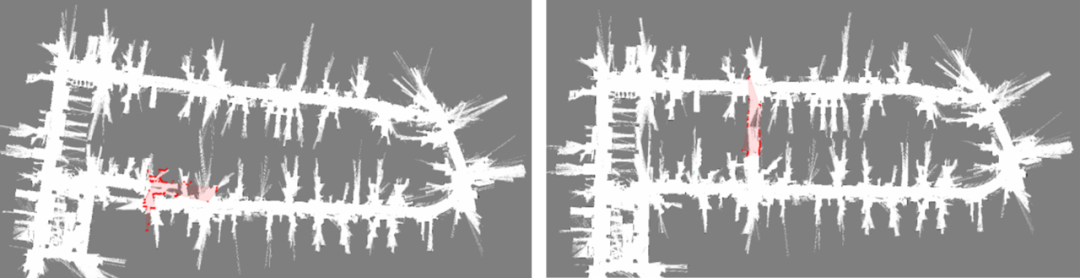
▲ 自动回环闭合纠正
分区建图,地图更新效率高
面对超大场景建图,slamware还拥有分区建图和更新地图功能,如果遇到局部区域地图信息变化,不用重新整体建图,通过SDK接口即可以实现地图更新,更好提升运行阶段的部署运维效率。
复杂场景下的融合定位技术
机器人在工作过程中,如下复杂场景会经常遇到:
· 相似和长直走廊,环境特征少
· 机器人轮子打滑场景
· 局部环境变化大,人流量大
· ……
slamware自主定位导航解决方案基于IMU、轮速里程计、Lidar和视觉的多源融合定位系统,支持高分辨率地图的实时定位,面对复杂场景,拥有多传感器融合技术、打滑检测技术、全局重定位技术、定位异常检测等技术,实现复杂场景下室内定位误差<1%,全局重定位成功率>80%。
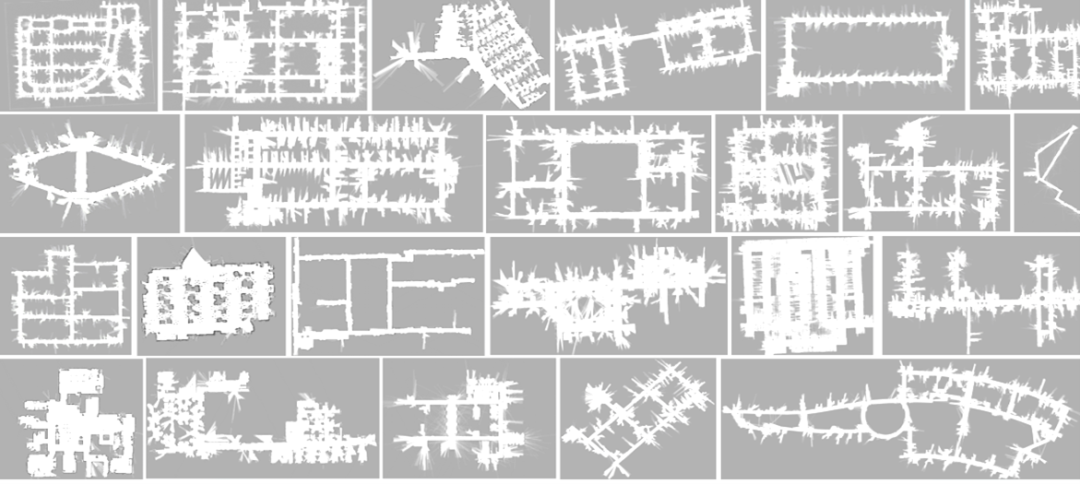
▲ 思岚slamware建图技术,无惧复杂场景
多传感器融合数据接入、处理
激光雷达作为机器人的“眼睛”,不仅可以直接获取周围环境、尺度信息,而且数据量小,适合后期SLAM,所以激光SLAM是目前行业内最流行的导航方式。思岚科技的slamware除了支持激光雷达传感器外,还支持市面上常用的传感器数据接入,多传感器融合导航方案,保障障碍物正确高效感知。
插入:多传感器导航
除此之外,还提供多种导航方式,如自由导航和轨道模式,让部署更轻松~
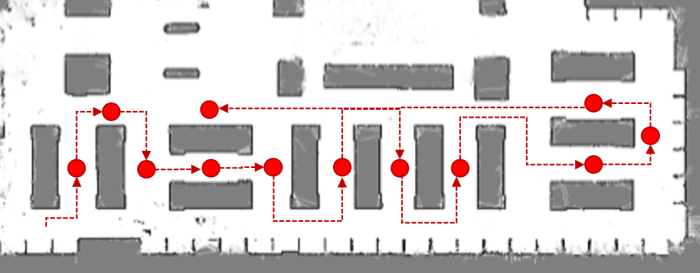
▲ 轨道模式自动规划路径遍历各扫描关键点
内置异常处理与故障恢复机制
为了实时掌握机器人的状态,也为了保障机器人平稳运行,slamware内置异常处理与故障恢复机制,精准定位机器人运行过程中的传感器和状态错误,保证机器人运行的安全性和高效性。

▲ 远程视频实时监控、异常状态记录时间戳
完整的工具链支持
1、提供PC端和移动端的可视化工具Robostudio,可实现:
- 对机器人的实时控制,及机器人运动状态的可视化;
- 场景化地图的构建,及导航和语义元素的部署;
- 集成离线建图、地图融合和地图优化工具,提高地图构建的效率;
- 提供log的实时显示界面,以及提供获取机器人历史运行状态备份的功能;
- 提供部署操作指南,常见问题说明,异常提示及处理建议,提升运维效率。
2、提供基于云端的远程部署和运维工具。
3、提供完备的SDK工具包,包括:
- C++ 与 java SDK工具;
- ROS SDK工具;
- 基于Restful API的SDK工具;
- 完善的文档说明及示例代码,帮助客户加速业务落地。
丰富的开发生态和软件支持
除了完整的工具链支持,Slamware还拥有丰富的开发生态和软件支持,让客户拥有良好的开发和产品体验,无后顾之忧。
思岚科技作为一家致力于提供机器人自主定位导航解决方案并致力于不断对其进行革新和普及的技术型公司,slamware自主定位导航解决方案不管是在产品形态,还是技术实现上,都历经了几代的产品更迭和升级。对技术的盘点,不仅仅是对技术的回顾,更是对未来的期许和重新定义、重新出发。
那么,在进入下一个十周年之际,slamware自主定位导航解决方案将会迎来什么新的变化发展和挑战呢?跟小岚一起拭目以待吧!
审核编辑:彭菁
-
智能搬运机器人2016-03-24 8207
-
激光导航AGV底盘定制 巡检机器人,服务机器人,智慧物流搬运AGV2017-06-10 8388
-
深度解析|机器人自主移动的秘密(三)2017-08-01 4861
-
机器人想要实现智能移动,必须具备超强的自主定位导航能力2018-01-03 4144
-
关于机器人定位与建图,这些小技巧你懂吗2018-03-28 4545
-
SLAM不等于机器人自主定位导航2018-08-24 7217
-
服务机器人是如何实现自主定位导航的?2018-10-10 3332
-
中国服务机器人定位导航技术现状分析2018-10-11 3758
-
基于MSP430F149单片机设计的室外移动机器人组合导航定位系统2019-07-11 2965
-
请问怎么设计一种室外移动机器人组合导航定位系统?2021-04-19 3004
-
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现2023-06-28 2203
-
如何利用SLAMWARE ROS SDK进行机器人导航定位开发2019-10-30 2117
-
SLAM+运动规划=机器人自主定位导航2020-03-30 3566
-
思岚科技模块化自主定位导航SLAMWARE解决机器人避障问题2020-06-01 6711
-
思岚科技携机器人自主定位导航解决方案亮相GAIE2021-05-23 2945
全部0条评论

快来发表一下你的评论吧 !
