

柔性触觉传感阵列+深度学习实现健康监测和纹理识别
描述
人类依靠皮肤真皮层中的感受器和与其相连的神经元网络来实现触觉感知。这些感受器能够检测来自外部的各种物理刺激(如触摸、压力、温度变化等),并通过神经元网络将这些信号传输到大脑进行解读和响应。机器人触觉感知旨在将这些技能复制到各种应用中,如机器人抓取、医疗康复以及非结构化环境下的操作等。触觉传感器被用来赋予软体机器人感知能力,使机器人更精确地识别和感知物体的表面纹理、硬度和形态,在抓取和操作不规则或易碎物体时显示出卓越的灵巧性。然而,目前为止这些触觉传感器还没有实现大规模应用,主要原因包括(1)大多数报道的触觉传感器不能分析和处理外力,并给出多模态信号的实时响应。例如具有感官能力的机器人有望在极端环境如水下或通信中断场景中监控和实时处理情况;(2)缺乏简单、大规模的触觉传感器制造方法。机器人触觉感知需要触觉传感器具有一致性、优异的灵敏度、高空间分辨率、宽检测范围以及易于集成到微型系统中等特性。因此,开发一种制造高性能触觉传感器的有效途径至关重要。
中科院空间应用中心王功研究员和赵伟副研究员提出一种结合模板化激光诱导石墨烯(TLIG)、弹性体热转印和3D打印银电极的简单策略来制造传感性能可调的TLIG基触觉传感器,并集成阵列化数据采集系统实现机器人触觉感知。该传感器具有出色的传感灵敏度(52260.2 kPa-1,范围0-7 kPa)、宽检测范围(高达1000 kPa)、快速响应(响应恢复时间12/46 ms)、出色的循环稳定性(10000个循环)以及零待机功耗。该传感器还具有出色的可设计性、防水性能,可共形贴附于人体皮肤表面实现健康监测。为了展示集成和规模化制造的能力,研究人员将5×2触觉传感阵列集成到机器人抓手系统中,利用深度神经网络识别不同物体的物理特征,实现触觉感知。基于卷积神经网络(CNN)的纹理识别系统具有94.51%的较高识别准确率。与传统制造方法相比,混合制造策略为生产高效率、低成本的触觉传感器提供了一种很有前景的方法。
该研究以题为“Templated Laser-Induced-Graphene-Based Tactile Sensors Enable Wearable Health Monitoring and Texture Recognition via Deep Neural Network”的论文发表在最新一期《ACS Nano》上。中科院空间应用中心博士生季嘉雯为第一作者,王功研究员和赵伟副研究员为共同通讯作者。
TLIG触觉传感器的制备流程
采用激光诱导石墨烯和POE热转印技术制备了TLIG薄膜。将聚丙烯酸溶液固化在从砂纸上获得的模板化PDMS模具上,从而制得模板化的PI并作为激光碳源。采用不同目数和尺寸的砂纸,可以实现各种多层级结构的PI模板。利用激光在模板化的PI膜上生成多孔石墨烯,并通过热压将模板化的LIG层转印到POE膜上,即可得到具有多层级微结构的TLIG膜。底电极层为3D打印在PI膜上的银叉指电极,将其与TLIG薄膜组装得到TLIG触觉传感器。
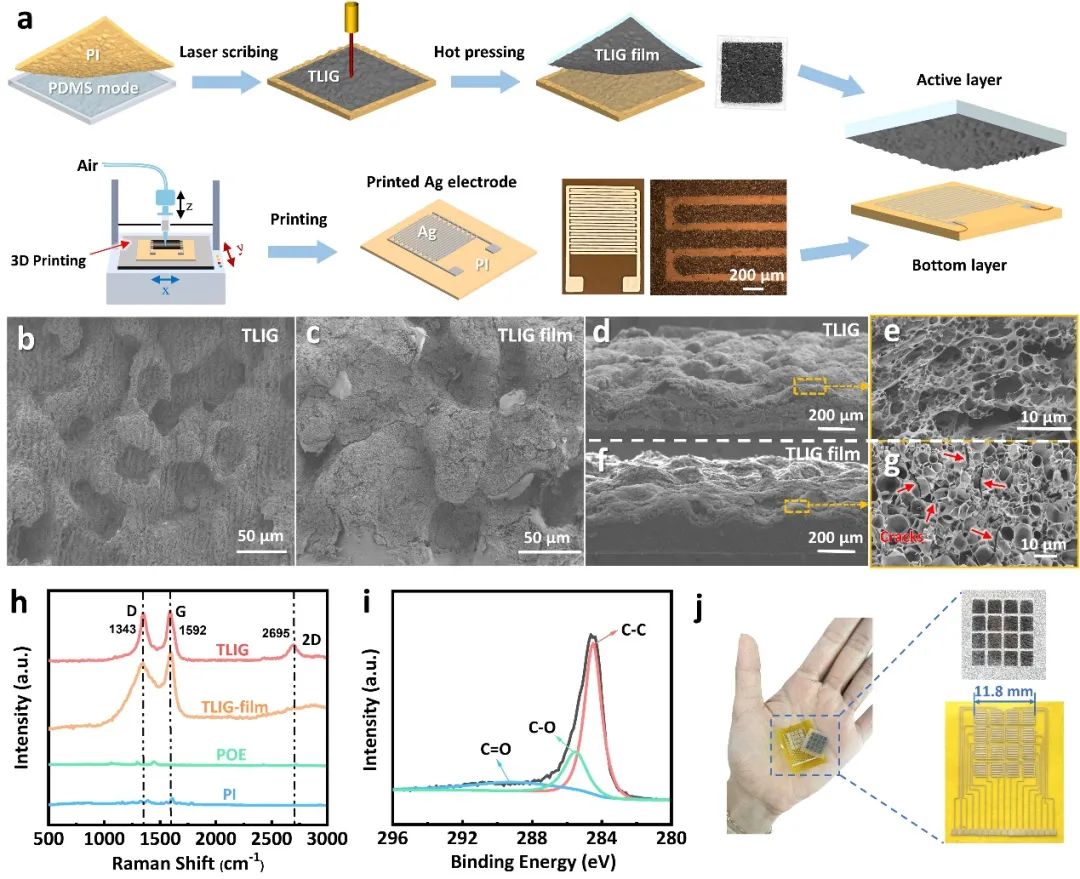
图1:基于TLIG触觉传感器的制备流程与性能表征
TLIG触觉传感器的传感机理模型
不同目数的砂纸模板具有不同高度和分布的微结构,这将显著影响外力作用下的变形程度和接触面积。这种改变会影响导电通路的建立,从而直接影响传感性能。利用砂纸模板赋予传感层的多层级微结构,可以将传感过程分为三个阶段:(1)在微小压力下,只有少数高凸起的TLIG薄膜与Ag叉指电极接触,开始建立导电通路;(2)随着压力的增加,TLIG薄膜进一步压缩变形,导致高凸起和Ag电极之间的接触面积持续增大,同时较小的凸起开始接触底电极。随着TLIG薄膜与Ag电极之间的间隙不断减小,TLIG薄膜的变形更加剧烈,触觉传感器的电阻显著降低;(3)在高压范围下,大部分凸起与Ag电极相互作用并达到峰值接触面积。此时TLIG膜与Ag电极层几乎完全接触,电阻值降至最小并保持稳定。
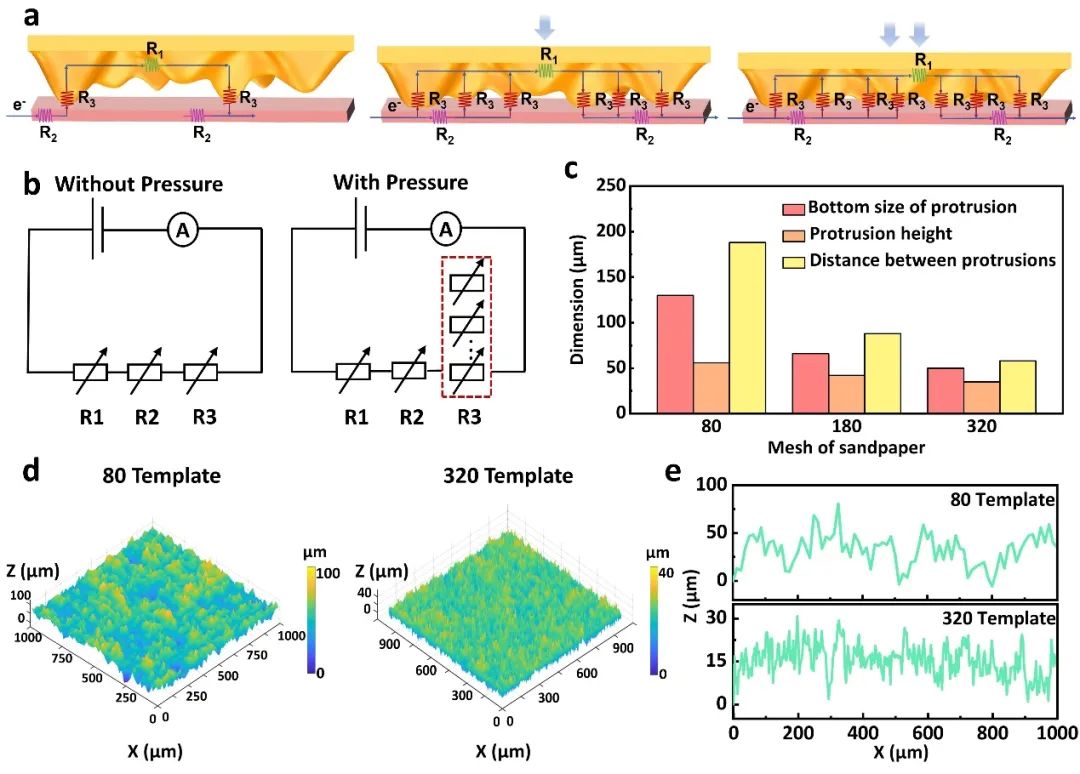
图2:基于TLIG触觉传感器的传感机理分析
TLIG触觉传感器的传感性能分析
为了测量曲面上的动态力,获得传感器在弯曲表面上的高灵敏度和宽响应范围,研究人员在传感层和电极层之间引入自支撑的间隔层,实现传感器的零待机功耗。通过使用不同目数的砂纸模板,制备出性能优异且可调的触觉传感器。对于高目数模板,传感层微结构分布密度高、凸起窄而低,其在0~7 kPa范围内可实现超高的灵敏度52260.2 kPa-1。而低目数模板,传感层微结构分布密度低、凸起高而宽,可实现超过1000 kpa的较宽的检测范围和优异的线性度。同时传感器还具有65pa的较低检测限、快速的响应/恢复时间12/46 ms和10000次加载/卸载循环下的优异工作稳定性。使用不同目数的砂纸模板,我们可以制备灵敏度可调的传感器。这种能力为传感器提供了更大的通用性和选择性,以满足广泛的应用需求。
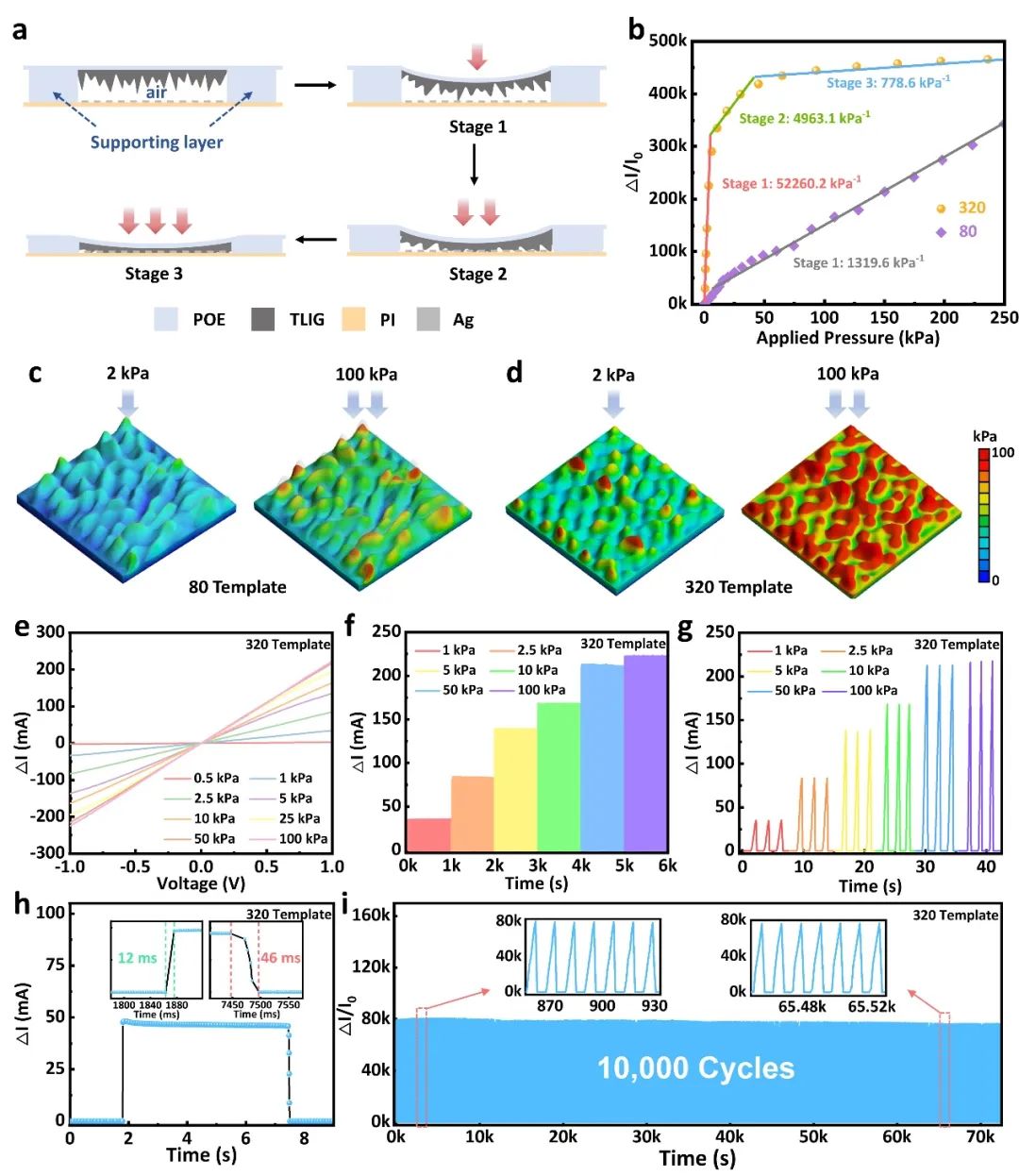
图3:基于TLIG触觉传感器的电学性能研究
基于TLIG触觉传感器的高分辨率可穿戴医疗健康检测系统
凭借在宽压力范围内的高灵敏度和优异的稳定性,基于TLIG的触觉传感器非常适合集成到可穿戴医疗健康检测系统中。传感器具有的出色拉伸性和弯曲特性,也可以灵活地附着在身体的各个部位,以检测特定的和可重复的脉冲信号。实验证明,该传感器可以检测范围广泛的压力信号,从超低压(气流和振动)到低压(脉搏和各种人体运动),再到高压(人体步态监测),这为电子皮肤、机器人和人工智能的应用提供了巨大的潜力。
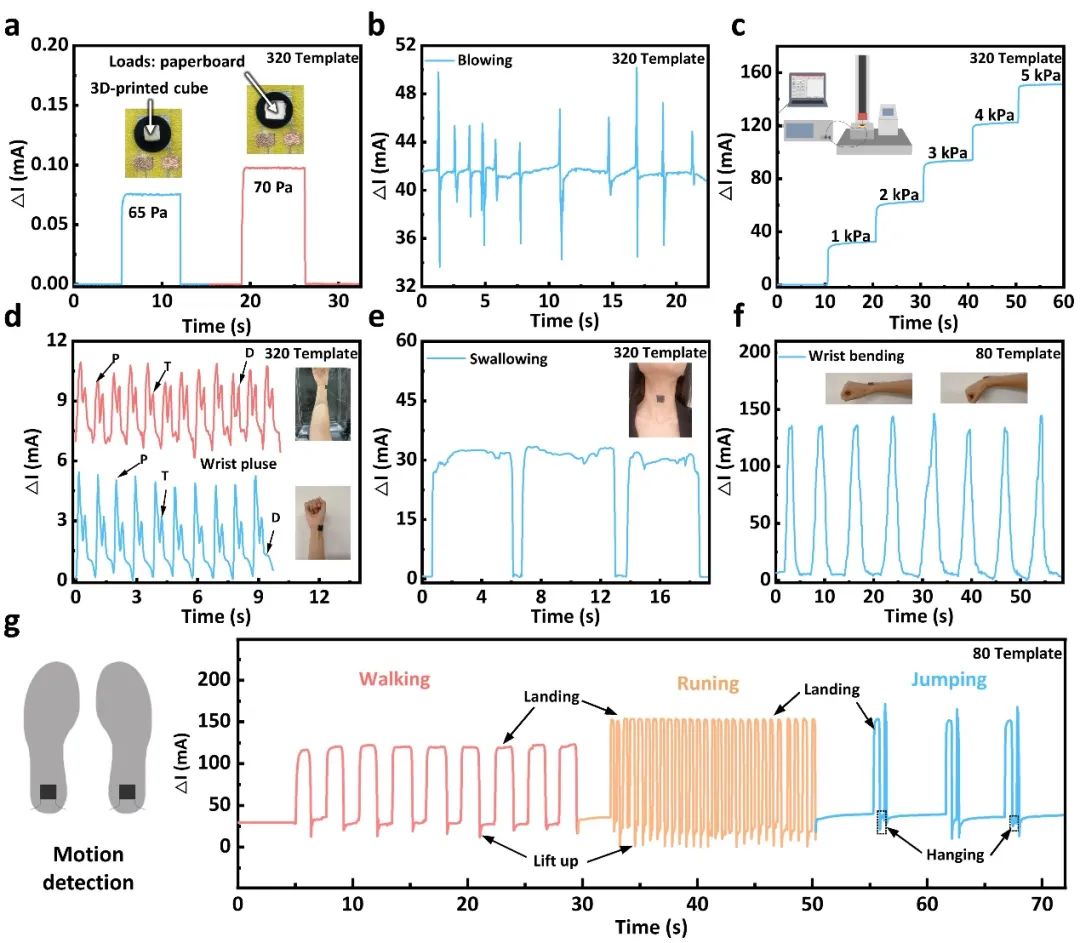
图4:基于TLIG触觉传感器的应用
TLIG触觉传感阵列集成触觉感知数据采集系统
机器人触觉感知的实现需要机器人集成柔性传感器,以提供离散和实时反馈。本研究选择一个四指柔性机械手作为触觉感知平台,并设计了一个基于5×2 TLIG的触觉传感阵列来匹配其形状。将其与多通道信号采集和预处理模块、通信模块和上位机共同组成触觉感知数据采集系统。该系统不仅可以实现对物体物理性质(包括形状、硬度和粗糙度等)的感知从而实现不同物体的识别,还可以提供交互式接触点动态压力分布的详细信息,从而增强柔性抓手的触觉感知能力。同时,利用弹性体的自封装,可以实现柔性机械手的水下抓取和识别,使其适合医疗环境和海洋领域等方面的应用。
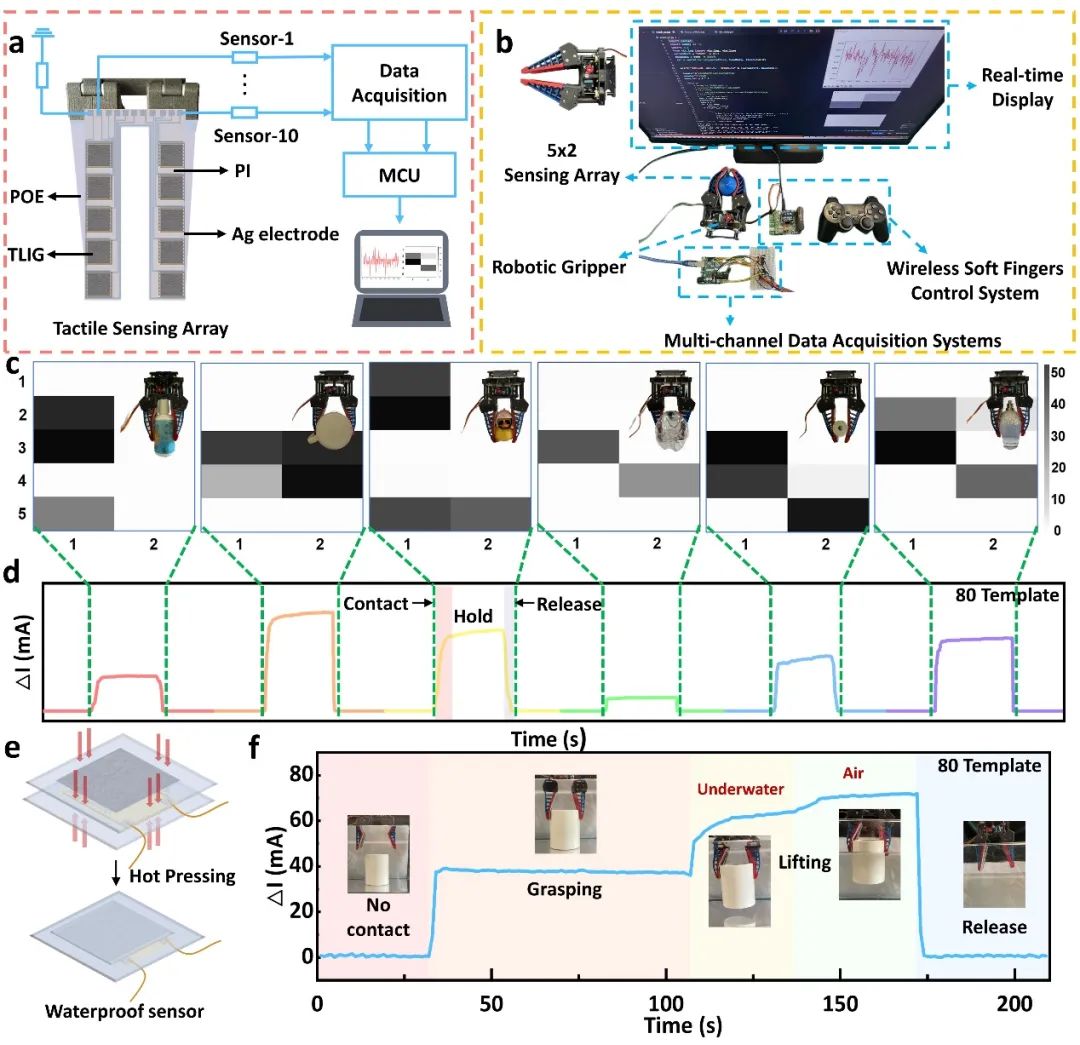
图5:基于TLIG的无线柔性机械手触觉传感阵列系统的结构与应用
TLIG触觉传感器用于基于深度神经网络的纹理触觉感知
人类可以通过手部神经元分析复杂的振动信号来区分物体,这对机器人来说是一个挑战。本研究采用基于卷积神经网的机器学习算法对柔性机械手采集的数据进行处理和分析,实现纹理触觉感知。测试系统由柔性机械手、基于TLIG的触觉传感阵列、编码器、解码器和神经网络组成,该系统用于感知触觉交互过程中的信号特征。本研究共采集了9种物体的纹理信号,共采用了8种机器学习方法包括CNN、Transformer、LSTM、GRU、MLP、K-means、SVM和PCA进行识别,其中CNN具有最高的准确率,达到94.51%。
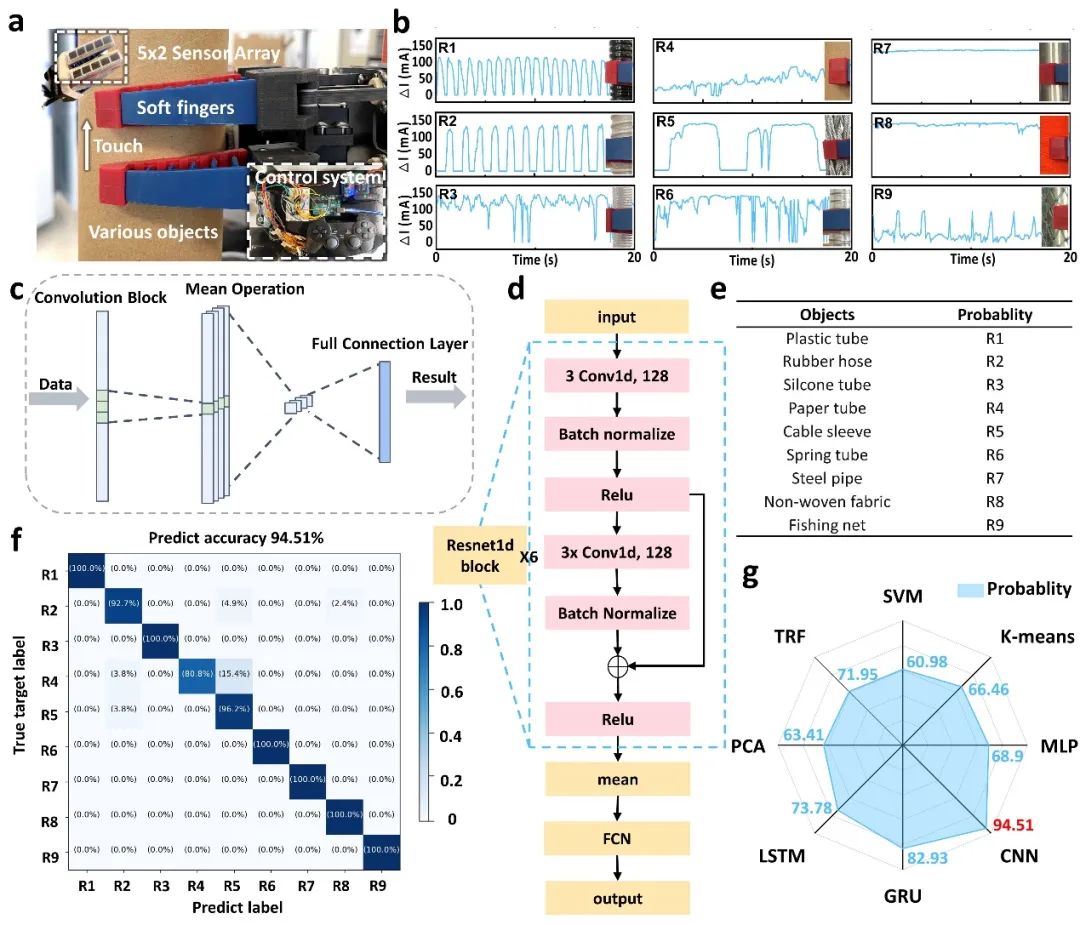
图6:卷积神经网络用于纹理识别
审核编辑:刘清
-
西湖大学:研发CMOS兼容压力传感器阵列,实现精准触觉感知功能2025-12-30 630
-
基于传感器和深度学习神经网络的血压监测系统2023-08-20 1359
-
讨论纹理分析在图像分类中的重要性及其在深度学习中使用纹理分析2022-10-26 2928
-
如何在深度学习结构中使用纹理特征2022-10-10 2041
-
如何在深度学习中使用纹理分析2022-09-29 1916
-
基于离电原理的柔性超透明触觉传感器件2022-08-30 2478
-
深度学习在预测和健康管理中的应用2021-07-12 1970
-
哈工大教授提出新型柔性触觉传感器阵列2021-01-19 6163
-
柔性可穿戴电子器件取得进展2018-09-21 1680
-
一种柔性触觉传感阵列力觉标定2018-01-19 980
-
基于CNT/Polymer复合材料的柔性触觉传感器设计2011-03-08 2187
-
纹理触觉信息检测系统研究2009-12-26 649
-
[分享][下载]美国PPS触觉传感器有限公司2009-12-16 4230
全部0条评论

快来发表一下你的评论吧 !
