

基于F4/F7/H7 MCU的无人机飞行控制系统
控制/MCU
描述
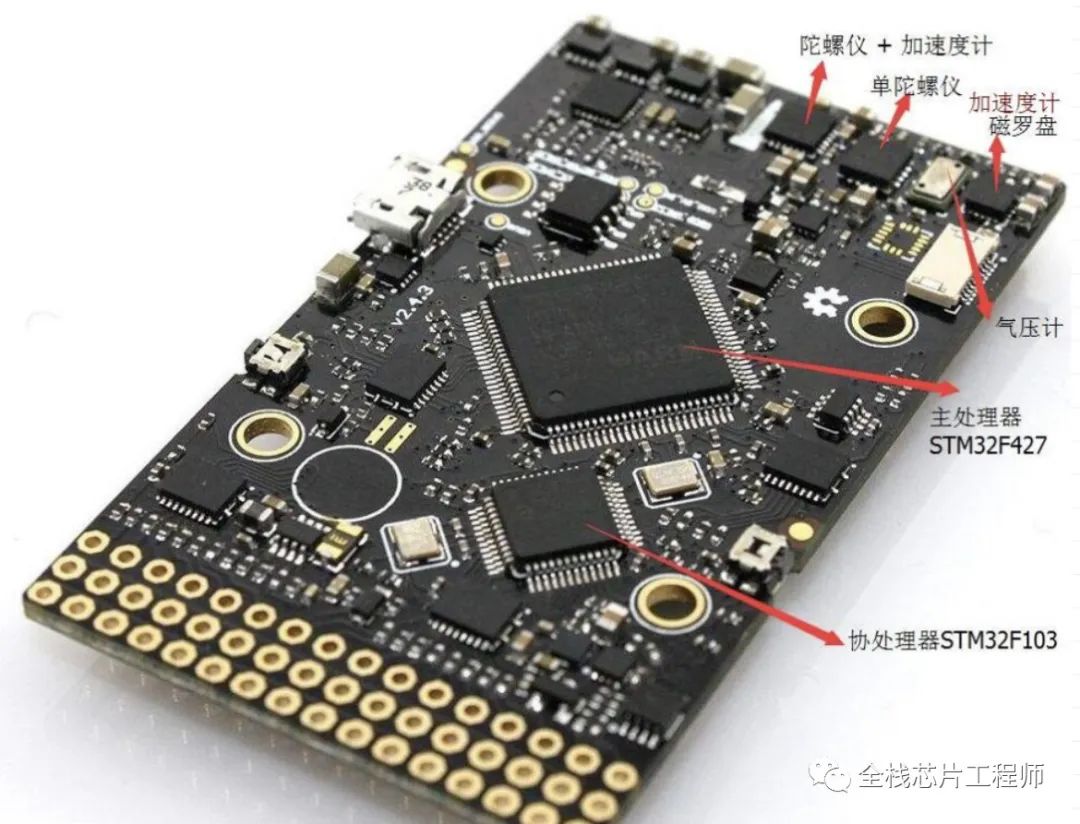
所谓无人机的飞控,就是无人机的飞行控制系统,要开发一款廉价自主无人机系统,可以采用F4/F7/H7 MCU的飞控硬件配合px4飞控固件。
PIXHAWK的硬件由PX4FMU/PX4IO两部分构成,它是双处理器结构,一个擅长于强大运算的32 bit STM32F427 Cortex M4 核心 168 MHz/256 KB RAM/2 MB Flash处理器,还有一个主要定位于工业用途的协处理器32 bit STM32F103,它的特点就是安全稳定,在主处理器宕机后保障安全。
四旋翼无人机的BLDC电调电机,通常需要单独的MCU进行控制,如果用更加节能的FOC控制方式,那么对MCU的性能要求就比较高。一般讲,这颗MCU除去控制电机外,还会处理一些其它事情并留有余量,所以生产无人机的厂商,大都喜欢用Cortex-M4的MCU来做FOC控制(NXP的高主频+硬件除法器的M0+也完全可以胜任),也就是四旋翼无人机需要四颗较高性能的MCU,来分别控制四个电机。
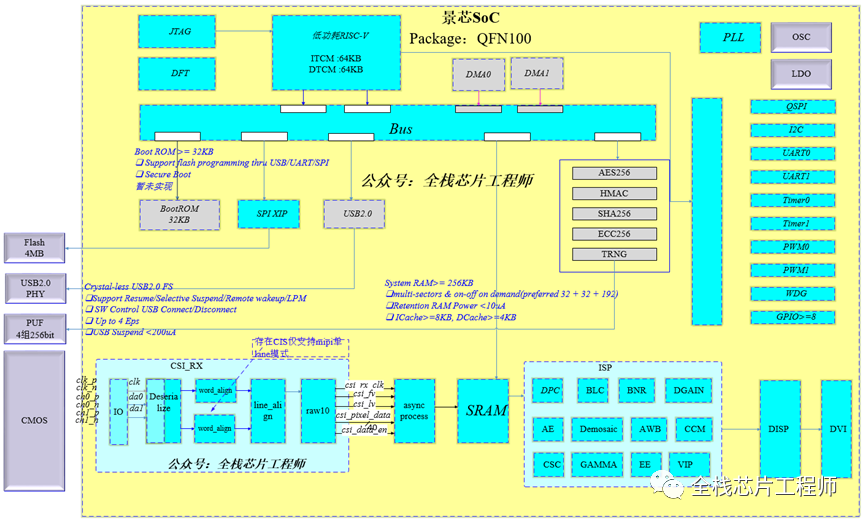
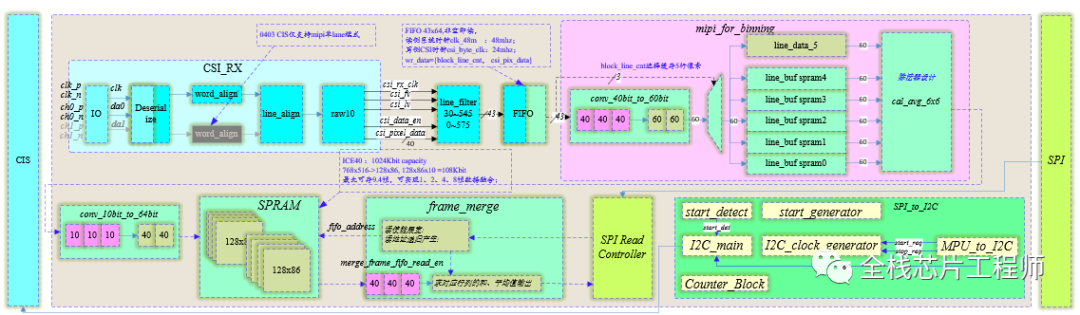
景芯SoC是一款用于芯片全流程培训的低功耗ISP图像处理SoC,采用低功耗RISC-V处理器,内置ITCM SRAM、DTCM SRAM,集成包括MIPI、ISP、USB、QSPI、UART、I2C、GPIO、以太网MAC控制器等IP,采用SMIC40工艺设计流片。
CPU: RISC-V
ITCM: 64KB
DTCM: 64KB
外设:MIPI/USB/HDMI/UART/I2C/QSPI/GPIO
系统时钟:100MHz
MIPI RX解码
ISP图像处理
HDMI接口
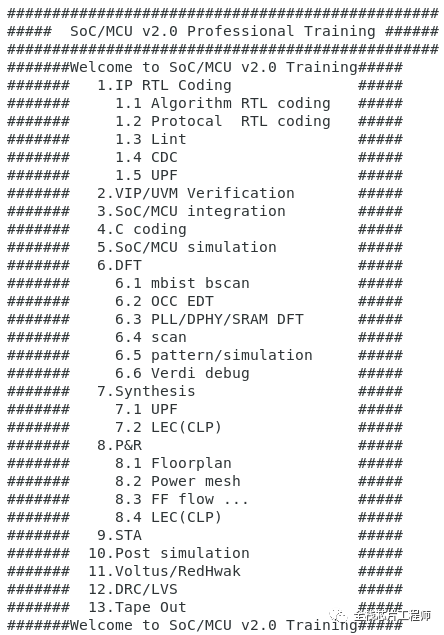
培训内容包括: SoC前端:您将学会高速接口、算法、协议的Verilog实现、Lint、CDC检查以及UVM验证;仅前端一门课程内容就抵得上其他培训机构的5-6门课程。 SoC中端:您将学会逻辑综合、低功耗UPF设计、DFT设计及debug技术、formal、CLP等技术,仅中端一门课程内容就抵得上其他培训机构的4-5门课程。
SoC后端:您将学会布局布线、StarRC/QRC、STA、DRC/LVS设计、功耗分析等技术,仅后端一门课程内容就抵得上其他培训机构的3-4门课程。
课程提供服务器供大家实践!带你从算法、前端、DFT到后端全流程参与SoC项目设计。更多内容,请联系号主报名,登录服务器实践,工程数据分割为如下三个部分。

图像处理的数据通路:

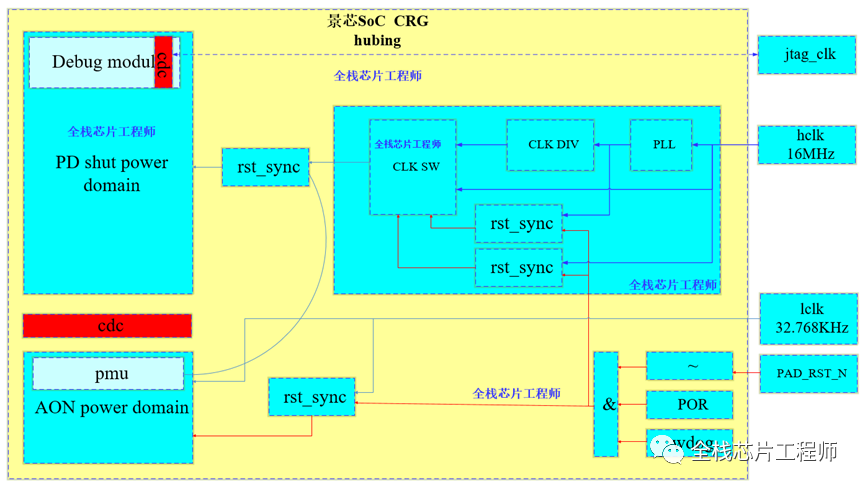
景芯SoC的CRG设计:
一键式完成C代码编译、仿真、综合、DFT插入、形式验证、布局布线、寄生参数抽取、STA分析、DRC/LVS、后仿真、形式验证、功耗分析等全流程。升级后的芯片设计工程V2.0 flow如下:
SoC一键式执行flow
MIPI DPHY+CSI2解码
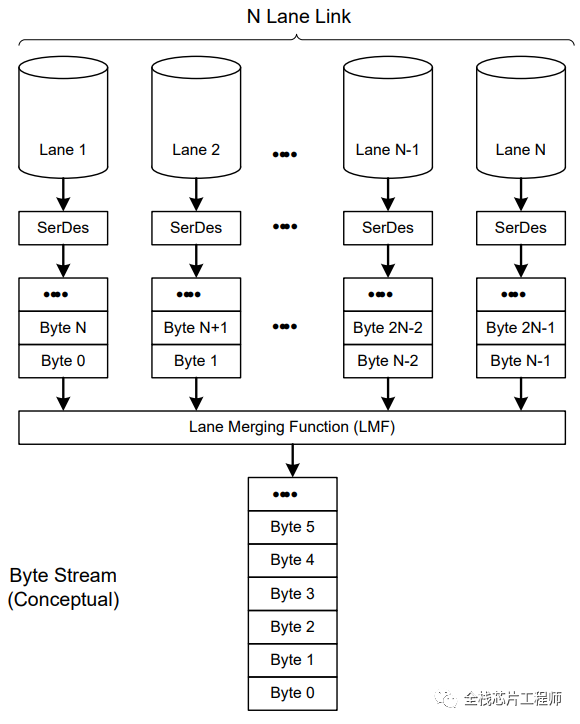
数字电路中经典设计:多条通信数据Lane Merging设计实现
UPF低功耗设计
全芯片UPF低功耗设计(含DFT设计)
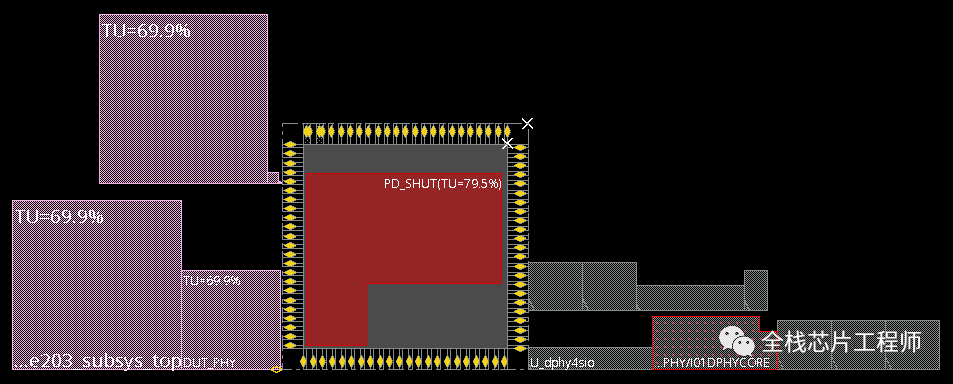
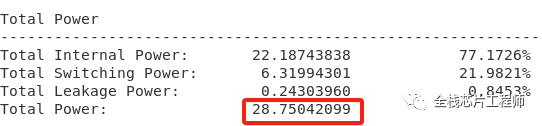
低功耗设计前,功耗为28.75W
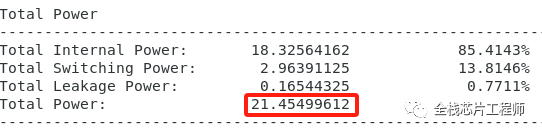
低功耗设计后,休眠时,功耗为21.45mW,降低7mW
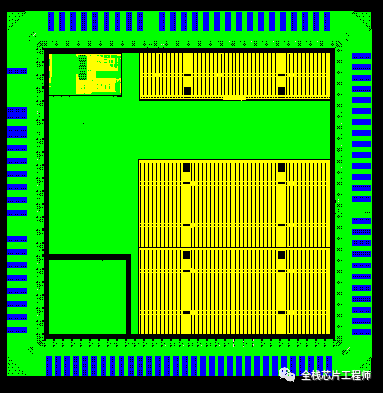
芯片的版图设计V1.0
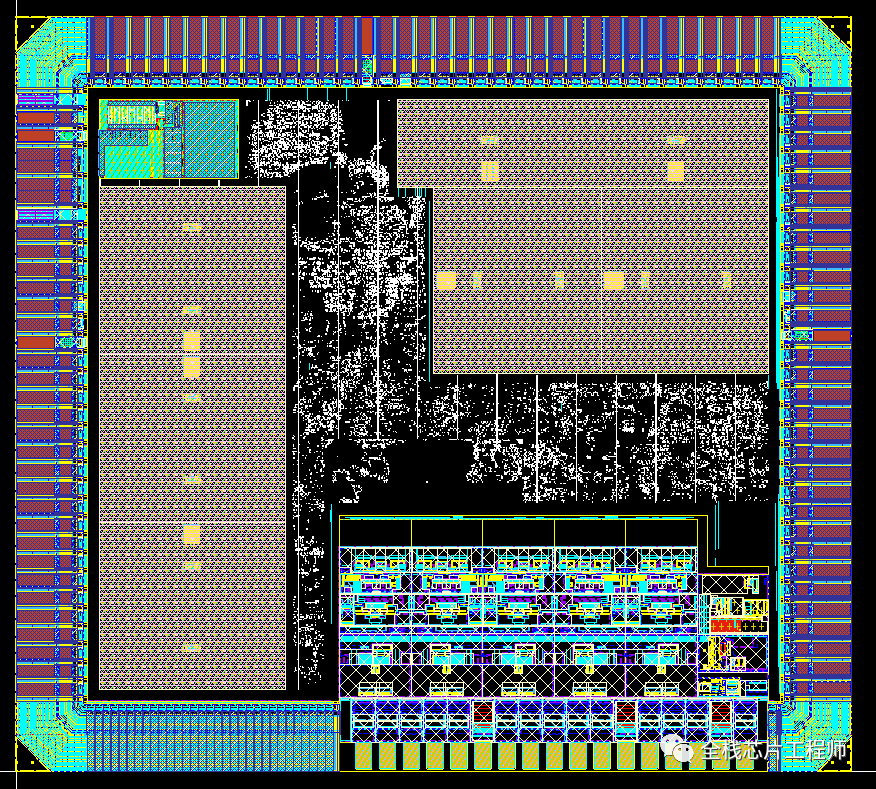
芯片的版图设计V2.0
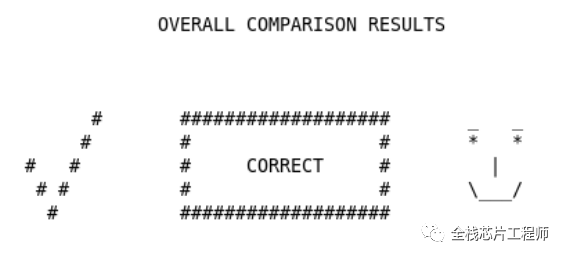
低功耗设计的DRC/LVS,芯片顶层的LVS非常具有挑战性!业界独一无二的经验分享。
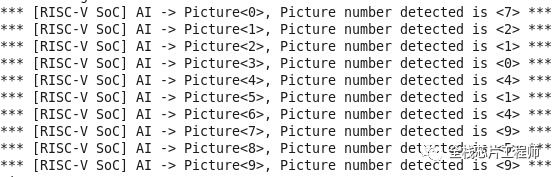
CNN图像识别
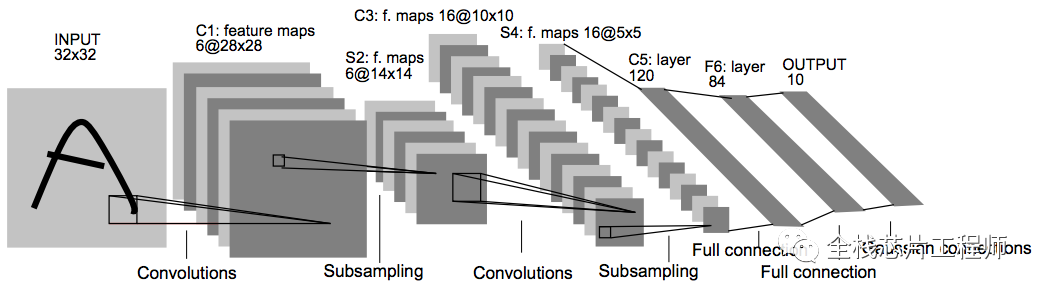
支持手写数字的AI识别:
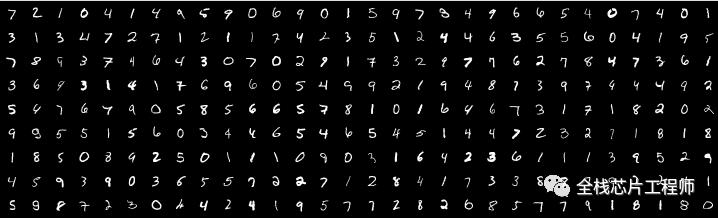
仿真结果:仿真识别上图7、2、1、0、4、1、4、9
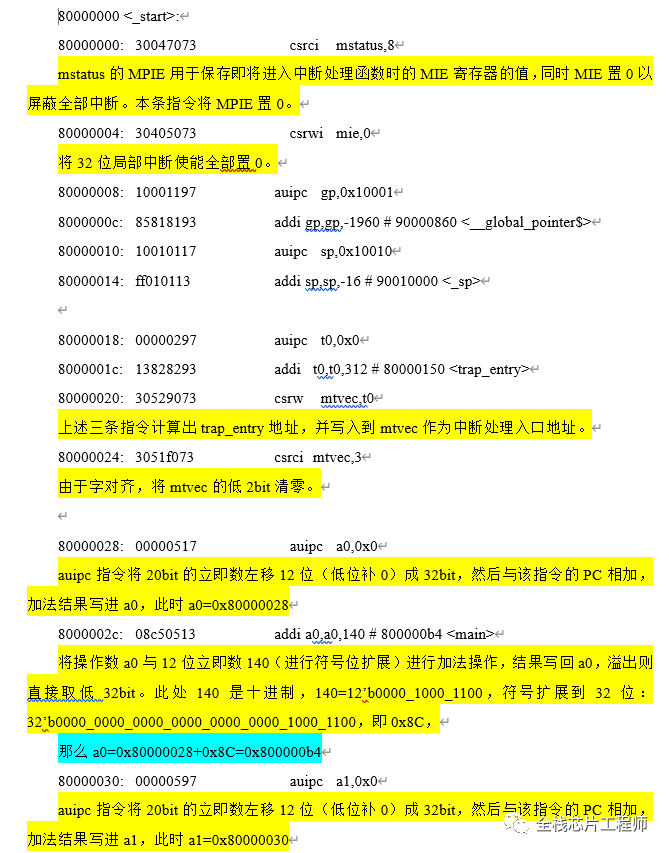
CPU启动指令分析
编辑:黄飞
-
STM32H7和F4做永磁同步电机FOC控制如何选型,哪个开发更好呢?2025-03-07 331
-
F1、F2、F3、F4、F5、F6、F7快恢复二极管品牌厂家2023-03-24 10159
-
AN5073_STM32F4/F7/H7高性能单片机S/PDIF音频接口2022-11-21 579
-
有刷电机无人机飞行控制器2022-08-08 1737
-
无人机控制系统原理是什么?2021-11-08 2977
-
无人机飞控系统2021-07-21 2819
-
无人机飞行控制器电路该怎么设计?2019-10-22 5075
-
请教下,F7, H7的芯片能否支持 这个型号的SDRAM ?2019-04-11 3043
-
STM32F7或H7的SDIO速度问题2018-12-13 7697
-
无人机中的MCU是如何工作的?2018-10-09 2731
-
介绍STM32F2/F4/F7/L4的OTG设备库(2)2018-07-02 5759
-
【野火新书】《STM32 HAL 库开发实战指南—基于F7》欢迎下载,后续会跟H7一起录制视频2018-06-01 5471
-
基于STM32微控制器的小型无人机飞行控制系统2017-09-25 1394
-
基于ARM的无人机飞行控制系统的实现2009-07-07 1601
全部0条评论

快来发表一下你的评论吧 !
