

CVPR2022;直接从点云提取3D基元
描述
1介绍
我们的日常生活环境充满了经过精心设计的计算机辅助设计制造的物体。这使得在需要物理对象的副本或变体但相应的CAD模型不可用的情况下,进行逆向工程成为一个重要的工作流程。这种情况经常发生在修复机械或将前数字时代制造的物体数字化时。为此,首先使用产生点云的3D传感器扫描对象,然后将其分解为一组一致的基元或曲面,这些基元或曲面可由现有的形状建模工具(如Fusion360 或SolidWorks)解析。这里也推荐「3D视觉工坊」新课程彻底搞懂基于Open3D的点云处理教程!》。
2主要贡献
1.介绍了一种新的方法,将三维重建任务建模为一个挤出圆柱体分解问题,使其非常适合CAD建模。2.构建了一个神经网络,通过学习几何代理将输入点云分解成一组挤压筒,然后利用这些几何代理估计可微的闭式公式中的挤压参数。3.在两个现有的CAD数据集Fusion Gallery 和DeepCAD上进行了定量和定性的验证
3方法
3.1挤压圆筒定义
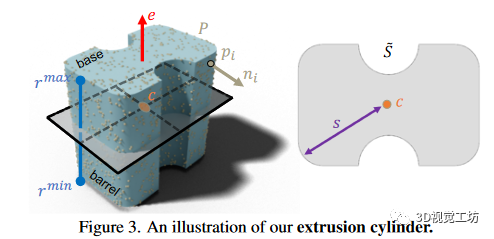
在深入研究方法细节之前,首先定义“挤压圆筒”,这是一种基元,它使我们能够灵活地从任意闭环创建任何形状,通过一系列布尔运算组合它们,的定义如图 3 所示。我们进一步提出了封闭形式和可微分的公式来从点恢复挤出参数。定义1:定义了一个非自相交、有限面积、闭环和归一化2D草图 由一组点定义,函数 q 将值范围映射到实数线,而另一个函数 p 则将实数线映射到 2D 空间,2D 草图已归一化,这意味着它已被缩放和平移,因此其边界框的宽度和高度均为 1 个单位定义2:定义了包含的平面,以及中心 c 和沿轴的法线 e定义3:定义圆柱体E , s是草图的缩放率定义4:将沿着挤压圆筒表面的点分类为基点或筒点。基点是位于挤出圆筒任一范围的平面上的点,而筒点是位于沿着挤出圆筒“侧面”的点。因此,基点/筒点的表面法线平行/垂直于挤出轴 e。对于任何与挤压圆柱体 (pi 2 R3) E 边界相关的点,我们用 bi 表示该属性。bi = 0 表示桶,bi = 1 表示底座。其中 ni 是在点 pi 处计算的表面法线。公理1:对于挤压筒上的一组点,最佳挤压轴由下式给出:其中,,而 Nbase ∈ RNbase×3 ⊂ N 和 Nbarr ∈ RNbarr×3 ⊂ N 表示属于挤压圆柱体的底座/桶点的相应法线,通过H的最小特征值对应的特征向量即可得到解。公理2:对于一般加权点集,最佳挤出轴由下式给出:其中:φbarr/φbase 分别表示分配给所有点的桶/基础权重
3.2其他参数计算
我们首先定义一个运算符 :,该运算符通过将给定向量 e 与 z 轴对齐,将该点投影到 xy 平面上,然后将另一个向量 c 居中以原点为中心,将 3D 点映射到 2D 点草图:将此运算符应用于挤出圆柱体的基点,以获得圆柱体的未归一化草图s拉伸比例:通过取草图中最远的点到原点的距离来计算拉伸比例预测草图表示,每个线段 k 的桶点投影到由 (ˆ ck, ˆ ek) 定义的平面上并按 ˆ sk 缩放S归一化草图:使用拉伸比例和通过缩放未归一化草图获得的归一化草图:会出现一些问题:很难通过这些点去简单的拟合一个二维基元,很难保证输出草图是封闭的,并且不自相交,而且同一个 2D 草图可能有多种基本近似值,这阻碍了可学习性c挤压中心:通过 P 的所有桶点的平均值来估计由于我们估计的挤压轴是无方向的,因此我们通过从方程(4)中取绝对值的最大值来计算范围,并在两个方向上挤压计算出的范围,即:,
4构建挤压圆筒网络
4.1问题定义
(i)实例分割 :定义将每个点分配给某个片段 k{1 ...K} 的可能性,其中每个片段都是挤压柱面(ii) 基础桶分割:实例化为 ,表示桶点,表示底座(iii) 表面法线 N ∈ RNX3对此,建立一个神经网络
4.1.1网络细节
现在给定预测的几何结果,M 紧凑且联合地组合了点 1)是基点或桶,以及 2)属于某个段的预测概率。然后,我们应用行式 softmax 将 ^ M 转换为行随机矩阵,其第 i 行表示点 pi 属于 2K 类之一
4.1.2通过神经网络推断草图
使用编码器函数 fβ 将草图的二维点云映射到全局的归一化草图潜在空间。 编码器函数生成的潜在代码充当解码器函数 S 的条件,该函数将 2D 点 r 映射到其符号距离值到底层归一化草图。
编码器函数生成的潜在代码充当解码器函数 S 的条件,该函数将 2D 点 r 映射到其符号距离值到底层归一化草图。 解码器:解码器函数将 2D 空间中的一个点映射到底层归一化草图的有符号距离值该线段的点与地面真值草图曲线之间的距离由一个隐式函数近似d 是 r 与线段 Sk 的地面真实草图曲线之间的距离该方法涉及使用编码器-解码器架构,其中编码器功能将二维点云映射到潜在空间,解码器函数将二维空间中的一个点映射到其符号距离值到底层的归一化草图。
解码器:解码器函数将 2D 空间中的一个点映射到底层归一化草图的有符号距离值该线段的点与地面真值草图曲线之间的距离由一个隐式函数近似d 是 r 与线段 Sk 的地面真实草图曲线之间的距离该方法涉及使用编码器-解码器架构,其中编码器功能将二维点云映射到潜在空间,解码器函数将二维空间中的一个点映射到其符号距离值到底层的归一化草图。
4.2训练
分割(seg)、基本点、桶点分类(bb)、法线(norm)和草图组成的多任务非凸目标来训练 G✓ 的参数 ✓正则化损失损失:1)预测法线和 GT 法线之间的绝对余弦距离进行惩罚:2)分割损失3)4)草图正则化损失
5实验结果
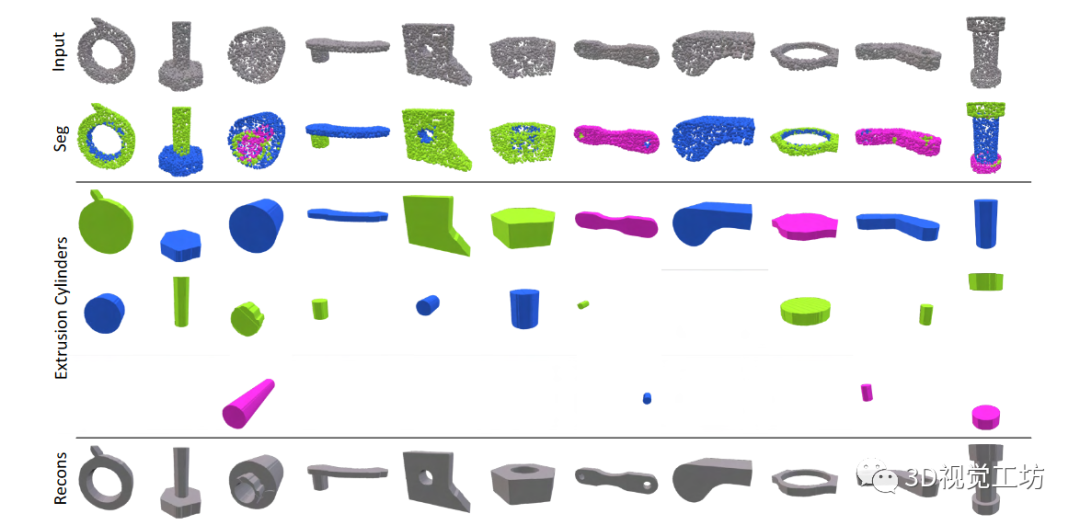
该图显示(从上到下)(1)输入点云,(2)我们的预测分割,(3-5)相应的一组挤压圆柱体和(6)我们的最终重建。该图还说明了我们分解的各个挤出圆筒是由各种闭环产生的。这里也推荐「3D视觉工坊」新课程彻底搞懂基于Open3D的点云处理教程!》。
6.总结
Point2Cyl,用于将 3D CAD 模型逆向工程为 CAD 设计者可解释和使用的基元。为了解决这个具有挑战性的离散连续分解问题,首先引入了挤压缸并开发了其拟合点集的基础。然后,提出了适合神经架构的可微分算法,该算法将点云划分为一组挤压缸。受益于一组代理预测,这些预测被证明可以注入正确的几何归纳偏差。与标准原始拟合相反,Point2Cyl 的输出允许形状变化,并且可以直接导入到现有的 CAD 建模器中,以进行进一步的重建、可视化和可重用性。
-
基于3D点云的多任务模型在板端实现高效部署2023-12-28 3440
-
基于深度学习的方法在处理3D点云进行缺陷分类应用2024-02-22 2791
-
如何同时获取2d图像序列和相应的3d点云?2018-11-13 3050
-
面向3D机器视觉应用并采用DLP技术的精确点云生成参考设计2022-09-22 2661
-
CVPR2022 人-物交互检测中结构感知转换相关资料推荐2022-11-09 3290
-
面向3D机器视觉应用并采用DLP技术的精确点云生成_原理图2016-11-22 1553
-
3D点云技术介绍及其与VR体验的关系2017-09-15 1623
-
点云问题的介绍及3D点云技术在VR中的应用2017-09-27 1567
-
3D的感知技术及实践2020-10-23 4490
-
关于3D点云针对失真的稳健性的系统性研究2022-03-15 2700
-
何为3D点云语义分割2022-07-21 10677
-
如何直接建立2D图像中的像素和3D点云中的点之间的对应关系2022-10-18 11500
-
如何试用MediaPipe实现人脸3D点云数据提取2023-02-23 2653
-
基于深度学习的3D点云实例分割方法2023-11-13 3985
-
C#通过Halcon实现3D点云重绘2025-01-05 511
全部0条评论

快来发表一下你的评论吧 !
