

AQS是什么
描述
那什么是管程呢?所谓管程,就是 管理共享变量以及对共享变量操作的过程 ,其有三种模型,分别为 Hasen 模型、Hoare 模型和 MESA 模型。目前应用最广泛的是MESA模型,而JAVA采用的也是这种MESA模型(其模型图如下图所示):
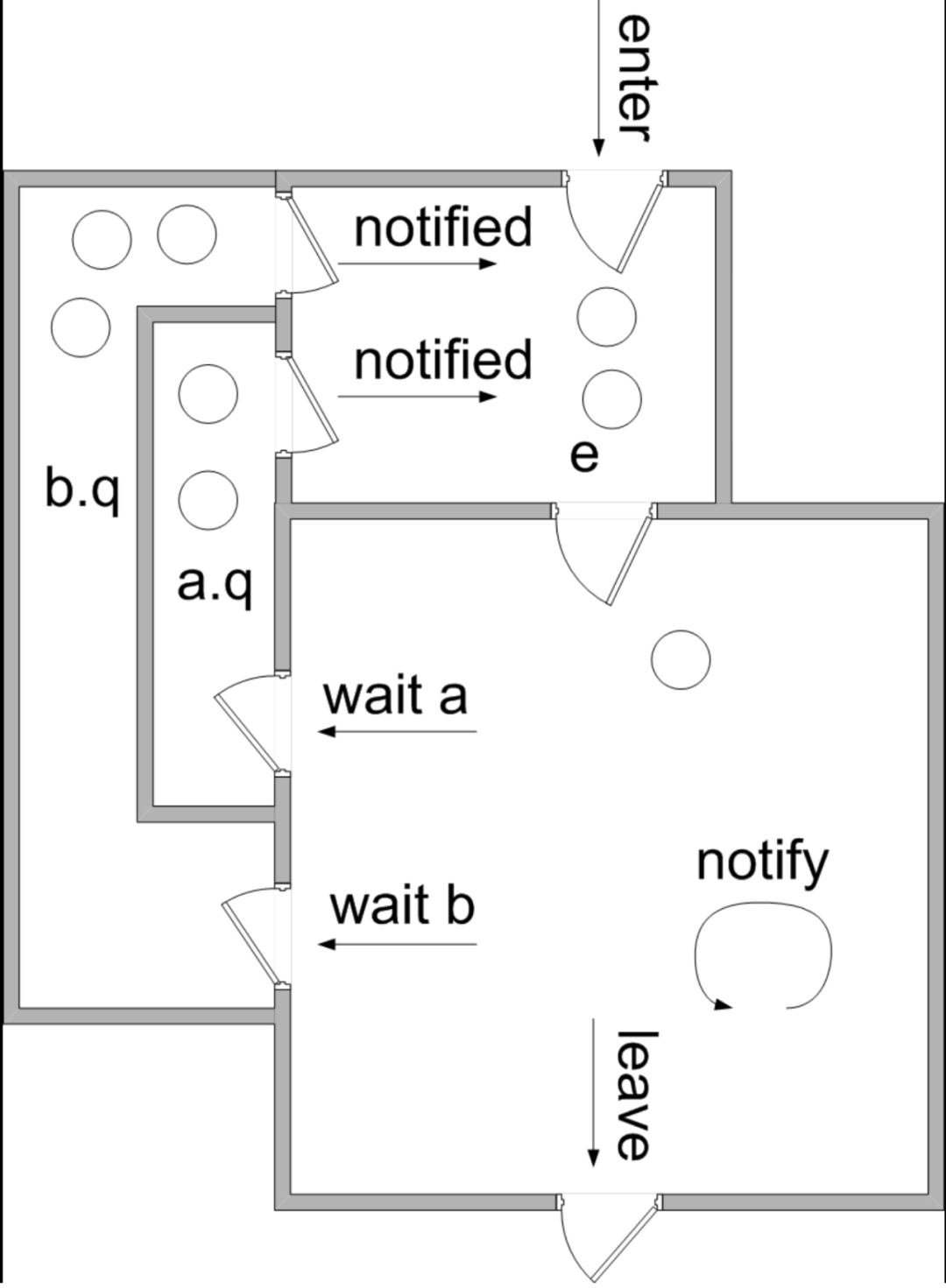
可能这个图大家现在还看不太明白,没关系,暂时留个印象,当看完指北君AQS系列文章以后,你再回过头来看这个图,肯定秒懂!
Java中的synchronized关键字就是其管程的具体实现,当然,今天所要聊的AQS同样也是。AQS是Java并发编程的基础,只要掌握它,java.util .concurrent工具包下的大部分工具类源码你都能在10分钟内看懂,连源码都懂了,还怕不知道怎么用吗?!
所以,针对AQS,指北君将用三篇文章来讲解:
第一篇即本篇,我会将AQS做个整体的介绍,并将其基础总结成了三把斧头,有了这三把斧头,你就能快速斩获AQS
第二篇我们则讲AQS如何通过锁机制解决互斥问题
第三篇则是AQS如何通过条件变量来解决线程通信协作问题
好了,现在随着指北君开始第一篇的学习吧
AQS是什么
好了,本文的正篇正式开始。前言说了半天AQS,AQS到底是什么呢?AQS全称为AbstractQueuedSynchronizer,翻译成中文即:抽象队列同步器,它是java.util .concurrent工具包下的抽象类,也是一个模板类(设计模式中的模板模式可以了解一波),你也可以理解为为开发人员提供的一种同步框架,它已经帮我们实现了大部分公共通用逻辑,如线程入队、出队,阻塞、唤醒等,我们只需要根据我们自己的需求,实现一些特定的方法,这些方法也叫钩子方法,比如下面几个方法:
- tryAcquire:独占模式下获取同步状态
- tryRelease:独占模式下释放同步状态
- tryAcquireShared:共享模式下获取同步状态
- tryReleaseShared:共享模式下释放同步状态
- isHeldExclusively:独占模式下,查看当前线程是否获取同步状态
AQS针对互斥,提供了两种模式,即独占模式和共享模式。独占模式只允许一个线程拿到锁去操作共享资源,而共享锁则有多把锁,允许多个线程同时操作共享资源,这个第二篇会详细讲解,在这之前我们需要先了解AQS的三板斧,这三个是了解AQS的基础:
- 状态:AQS中的所有逻辑都是依据状态state来进行的,所以它是整个类的和兴。它是被关键字volatile修饰的,保证其可见性和部分有序性
- 队列:一共有两种队列,同步队列和条件队列。当线程的请求在短时间内得不到满足时,线程会被包装成某种类型的数据结构放入队列中,当条件满足时则会拿出队列。
- CAS:由Unsafe工具类来实现的,其操作具有原子性,AQS通过CAS和volatile来保证状态的线程安全
第一板斧:状态
private volatile int state;
状态是被volatile修饰的int类型变量,它的值代表着锁还剩多少。在独占锁模式下,只有一把锁,则state只有0和1两个值,1代表锁没被其他线程占有,目前可获取;0则代表锁已经被其他线程占有了。在共享锁模式下,state最大值就是锁的数量。
后面我们对state的修改都是通过CAS操作,所以是线程安全的。
第二板斧:队列
AQS中存在两种队列,一种叫同步队列,它是双向链表,其获取锁失败的线程会被包装成Node放入同步队列中;另一种叫条件队列,它是单向链表,线程可以调用等待方法来把自己放入条件队列,或者调用唤醒方法把条件队列的其他被包装成Node的线程移到同步队列中。这个大家如果此时看不太懂没关系,第三篇文章会详细介绍这个等待唤醒机制。我们来看看线程包装成Node的Node类:
static final class Node {
// nextWaiter属性的具体值
static final Node SHARED = new Node();
static final Node EXCLUSIVE = null;
// 锁的状态
static final int CANCELLED = 1;
static final int SIGNAL = -1;
static final int CONDITION = -2;
static final int PROPAGATE = -3;
// 线程所处的等待锁的状态:CANCELLED,SIGNAL,CONDITION,PROPAGATE,初始化时,该值为0
volatile int waitStatus;
// 双向链表前指针和后指针
volatile Node prev;
volatile Node next;
// 表示当前Node所代表的Thread
volatile Thread thread;
// 如果此属性为EXCLUSIVE,则为独占模式;为SHARED,则为共享模式
Node nextWaiter;
// 判断是否是共享模式
final boolean isShared() {
return nextWaiter == SHARED;
}
// 获取链表的头个节点
final Node predecessor() throws NullPointerException {
Node p = prev;
if (p == null)
throw new NullPointerException();
else
return p;
}
// 构造函数,一般用在创建head头结点时使用
Node() {
}
// 构造函数,在addWaiter方法时使用
Node(Thread thread, Node mode) {
this.nextWaiter = mode;
this.thread = thread;
}
// 构造函数,在Condition中使用
Node(Thread thread, int waitStatus) {
this.waitStatus = waitStatus;
this.thread = thread;
}
}
指北君已经在源码上做了详细的注释,但这几个关键的属性上还是提出来单独看看。
下面四个属性是和节点相关的:
- prev:双向链表的前驱节点
- next:双向链表的后继节点
- thread:节点所代表的线程
- waitStatus:该节点线程所处的状态,即等待锁的状态
下面四个属性是waitStatus的具体状态:
- CANCELLED:此节点的线程被取消了
- SIGNAL:此节点的后继节点线程被挂起,需要被唤醒
- CONDITION:此节点的线程在等待信号,也表明当前节点不在同步队列中,而在条件队列中
- PROPAGATE:此节点下一个acquireShared应该无条件传播
关于waitStatus有几个点需要注意下:
- waitStatus除了上面四个状态,还有一个隐式的状态为0,即在Node初始化的时候
- 在独占锁模式下,只会有到状态CANCELLED和SIGNAL。需要特别注意的是,SIGNAL它代表的不是自己线程的状态,而是它后继节点的状态,当一个节点waitStatus为SIGNAL时,意味着此节点的后继节点被挂起,当此节点释放锁或者被取消拿锁,应该要唤醒后继节点
- 在共享锁模式下,只会用到状态CANCELLED和PROPAGATE
第三板斧:CAS
CAS又叫比较交换操作,它是Unsafe类中compareAndSwapXXX方法,我通过下面的例子做个简单的介绍:
unsafe.compareAndSwapObject(this, tailOffset, expect, update);
CAS执行时,会拿地址tailOffset上的值与expect做比较,如果相同,则会将地址上的值更新为update,并返回true,否则直接返回false。
了解了CAS的基本例子后,我们看下AQS中CAS相关的代码:
private static final Unsafe unsafe = Unsafe.getUnsafe();
// state、head、tail,waitStatus、next的偏移量
private static final long stateOffset;
private static final long headOffset;
private static final long tailOffset;
private static final long waitStatusOffset;
private static final long nextOffset;
// 静态代码块,初始化五个偏移量
static {
try {
stateOffset = unsafe.objectFieldOffset
(AbstractQueuedSynchronizer.class.getDeclaredField("state"));
headOffset = unsafe.objectFieldOffset
(AbstractQueuedSynchronizer.class.getDeclaredField("head"));
tailOffset = unsafe.objectFieldOffset
(AbstractQueuedSynchronizer.class.getDeclaredField("tail"));
waitStatusOffset = unsafe.objectFieldOffset
(Node.class.getDeclaredField("waitStatus"));
nextOffset = unsafe.objectFieldOffset
(Node.class.getDeclaredField("next"));
} catch (Exception ex) { throw new Error(ex); }
}
// 下面5个方法都是CAS操作了
// cas操作 state
protected final boolean compareAndSetState(int expect, int update) {
return unsafe.compareAndSwapInt(this, stateOffset, expect, update);
}
// cas操作 head
private final boolean compareAndSetHead(Node update) {
return unsafe.compareAndSwapObject(this, headOffset, null, update);
}
// cas操作 tail
private final boolean compareAndSetTail(Node expect, Node update) {
return unsafe.compareAndSwapObject(this, tailOffset, expect, update);
}
// cas操作 waitStatus
private static final boolean compareAndSetWaitStatus(Node node, int expect, int update) {
return unsafe.compareAndSwapInt(node, waitStatusOffset, expect, update);
}
// cas操作 nextOffset
private static final boolean compareAndSetNext(Node node, Node expect, Node update) {
return unsafe.compareAndSwapObject(node, nextOffset, expect, update);
}
我们说第二板斧的时候说过,其五个属性state、head、tail,waitStatus、next都是被volatile修饰的,所以CAS对其操作能保证其线程安全,因此也可以猜到这些属性肯定是多线程争着修改的目标。静态块里则是对这五个属性偏移量进行初始化。
总结
AQS的三板斧就介绍完啦,我们再来简单回顾下:
AQS(AbstractQueuedSynchronizer)是java.util .concurrent工具包下的抽象类,它通过实现MESA管程来解决并发领域中的同步与互斥问题。AQS实现中最重要的三点就是状态、CAS和队列,我们也称之为AQS的三板斧。AQS的一切操作都是依据状态state来的,它是被volatile修饰的全局变量,因此我们通过CAS操作使其线程安全。队列是维护阻塞等待线程的容器,所有未获得锁或被要求等待的线程都会被包装成Node放入队列中。
-
探索HMC253AQS24 / 253AQS24E:DC - 2.5 GHz GaAs MMIC SP8T非反射开关2026-05-27 575
-
探索HMC253AQS24/253AQS24E:DC - 2.5 GHz的GaAs MMIC SP8T非反射开关2026-04-28 317
-
探索 HMC253AQS24/253AQS24E:DC - 2.5 GHz 的 GaAs MMIC SP8T 非反射开关2026-02-09 1542
-
AQS如何解决线程同步与通信问题2023-10-13 1391
-
AQS的同步组件有哪些呢?2023-03-16 1356
-
HMC245AQS16革资料2021-06-01 695
-
HMC253AQS24革资料2021-05-28 781
-
HMC253AQS24 S参数2021-04-09 760
-
HMC241AQS16革资料2021-03-24 642
-
HMC245AQS16 Gerber Files2021-03-11 739
-
HMC253AQS24 Gerber Files2021-02-19 745
全部0条评论

快来发表一下你的评论吧 !
