

小型无人机设计的轻量级3D成像雷达系统技术解析
军用/航空电子
描述
无人机(UAV)的使用越来越广泛,它们可以在人类无法或不便进行的环境中执行任务,比如在恶劣的天气条件下、在危险的地方,或者进行繁琐和枯燥的工作。它们携带的各种设备,如相机、雷达传感器、通信设备等,可以用于地球观测、侦察、监控和监视任务。这大大扩展了我们的观察和操作范围,同时也降低了人力和物力的消耗。
雷达传感器在无人机上的应用至关重要,它们能在各种天气条件下工作,并不受时间的影响。这就使得无人机可以在雨、雪、雾等恶劣天气条件,或者在夜晚进行任务。
对于小型无人机来说,由于其体积小,重量轻,所以在设计和开发传感器有效载荷时,必须要把重量和体积的限制考虑在内。同时,小型无人机还具有易于运输和低维护成本的优点,使它们在各种任务中得到广泛应用。因此,无论是大型还是小型的无人机,其传感器设计都需要兼顾到功能性和便携性,以满足不同的应用需求。
Airborne Radar for Three dimensional Imaging and Nadir Observation 这是一种专为小型无人机设计的轻量级3D成像雷达系统,这种新型雷达系统结合了多输入多输出(MIMO),数字波束形成以及合成孔径雷达技术。
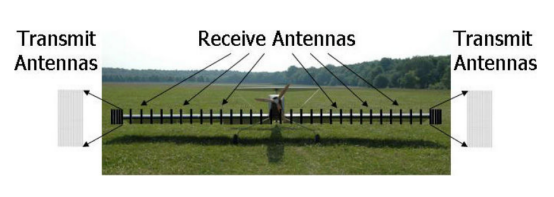
阵列由N=44个发射元件和M=32个接收元件组成,形成具有1408个虚拟线性天线阵,从而实现了高分辨率的成像能力。合成孔径则由飞机的移动形成,采用合成孔径雷达的原理,实现高的纵向分辨率。这种虚拟线性天线阵列的最优阵元布局是由M个接收元件嵌套在两侧各N /2个发射元件之间。形成的MN的虚拟线阵。
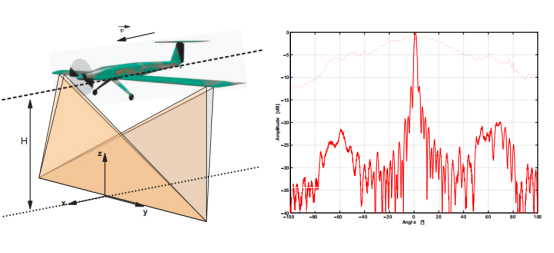
该系统采用了相干FMCW雷达技术,有效降低了峰值功率需求、尺寸和重量,同时保证了良好的距离分辨率。ARTINO雷达系统的高频前端设计为Ka波段,这使得雷达天线可以做得更小,非常适合安装在小型无人机的机翼上。
系统的参数设置及数据存储由中央数字和存储单元(DSU)负责,包括扫描时间、带宽设置,以及选择活动的发射天线和触发信号等。
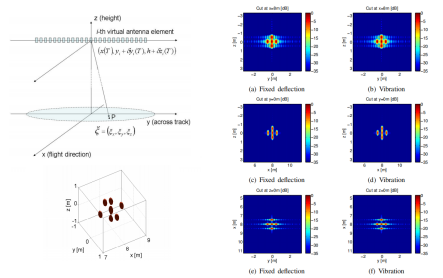
根据实验结果,ARTINO雷达系统的性能非常优秀,不仅可以进行目标检测和参数估计,还可以进行目标跟踪和识别等任务,完全满足了无人机在各种环境下的应用需求。
编辑:黄飞
-
无人机机载高光谱成像系统的应用及优势2024-08-15 2730
-
反无人机技术的研发,无人机反制设备成为热门产品2022-09-08 28942
-
毫米波雷达模块发展,无人机雷达避障技术应用,雷达传感器方案2021-09-27 1652
-
基于3D设计和打印的单转子无人机方案2021-04-29 3582
-
无人机探测技术2020-07-29 2956
-
ARDUINO DIY轻量级无人机飞控的详细资料说明2018-12-29 8337
-
全球最大的FDM 3D打印无人机2018-04-15 9050
-
无人机技术之3D位置融合教学ppt下载2018-01-15 1494
-
无人机技术解答2017-11-15 29056
-
无人机侦测和反制系统2017-04-05 8613
-
如何利用3D打印技术生产无人机?2016-12-26 1339
-
解析3D打印无人机的三大最佳应用领域2016-11-21 2602
-
无人机遥感技术2016-03-11 8143
-
超音波3D映射为无人机应用铺路2015-12-11 1010
全部0条评论

快来发表一下你的评论吧 !
