

以单颗CMOS摄像头重构三维场景,维悟光子发布单目红外3D成像模组
描述
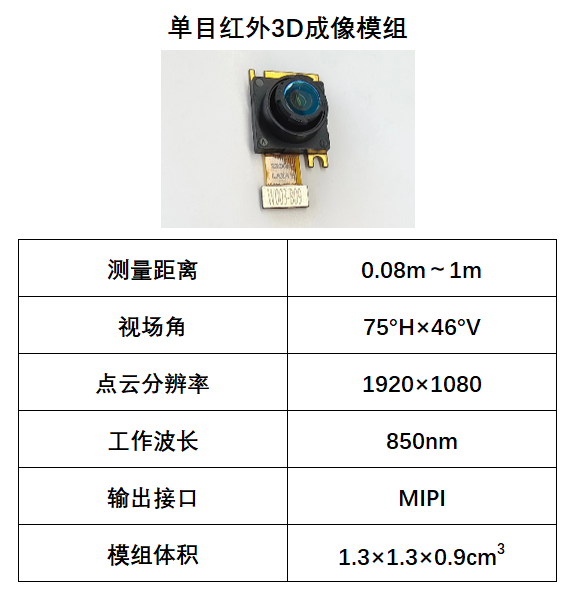
维悟光子近期发布全新单目红外3D成像模组,现可提供下游用户进行测试导入。通过结合微纳光学元件编码和人工智能算法解码,维悟光子单目红外3D成像模组采用单颗摄像头,通过单帧拍摄,可同时获取像素级配准的3D点云和红外图像信息,可被应用于机器人、生物识别等广阔领域。
市场前景与应用
3D视觉是人工智能、通用型机器人感知世界的重要窗口,是数字化、智能化产业转型升级的物质基础。目前3D视觉市场采用的方案主要包括飞行时间法(ToF)、结构光和双目相机。这三种技术路径需要借助激光器、高速高灵敏度探测器或多个相机,才能实现深度信息的获取。相对复杂的硬件系统会带来更高的器件成本、功耗、体积,也会对器件之间的标定和配准有更高的要求,在实际应用场景中存在诸多痛点。
硬件系统的轻量化和降本是3D视觉市场演进的必然趋势。维悟光子通过底层原理的创新,仅利用单目CMOS相机(最简单的成像系统)就可以获取完整的3D信息。本次发布的单目红外3D成像模组,主要面向机器人避障应用,也能适用于生物识别等需要中近距离3D成像的场景。
相比于ToF、结构光和双目相机三种传统技术路径,维悟光子单目3D相机的独特优势有:
更低的器件成本
维悟单目3D相机采用单个CMOS相机获取深度信息,可以节省激光器、高速高灵敏度探测器和多颗摄像头导致的高昂器件成本。
更小的体积和重量
维悟单目3D相机利用单颗摄像头即可获取3D信息,本次发布的mipi接口模组重量仅约3克,可以轻松适应穿戴式设备、无人机等应用场景。
更低的功耗和发热量
维悟单目3D相机不需要主动激光照明,单个CMOS相机的功耗和发热量都较低,能够更好地适应嵌入式设备、穿戴式设备等低功耗应用场景。
更高的点云分辨率
维悟单目3D相机利用成熟的CMOS传感器获取3D信息,能够以较低的成本获取高分辨率的原始图像,且点云数量相较于传感器分辨率没有损失,可以轻松获取稠密点云信息,更好地满足机器人、自动驾驶等领域的应用需求。
天然的3D点云与红外图像配准
维悟单目3D相机通过单帧图像编码记录3D信息,算法解码后的3D点云和红外图像可以天然实现自配准,避免了额外的配准操作带来的算力负担和误差。
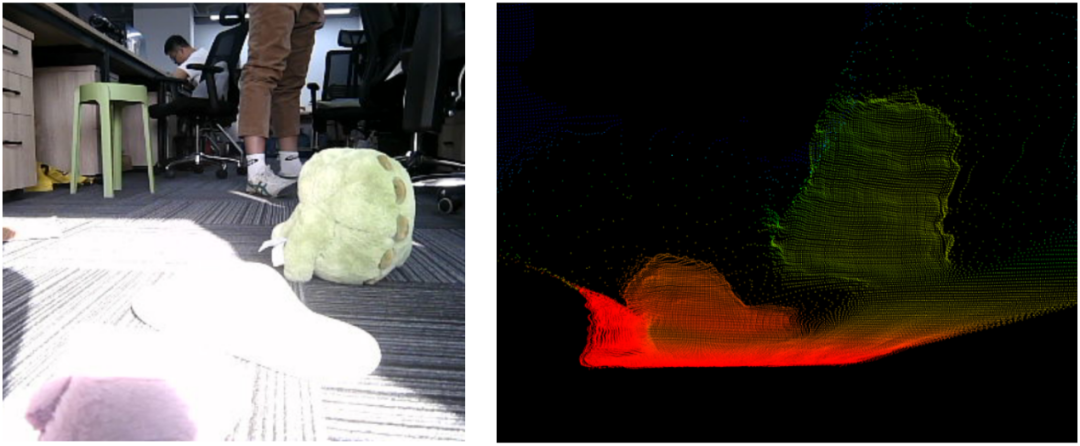
下图是在机器人避障场景的实拍效果演示。
点云分辨率可高达1920×1080(可根据应用需求灵活调整)。维悟单目3D相机能够以更低的成本获取更高分辨率的点云图,让机器人可以“看到”更微小的物体和更准确的轮廓细节,同时可以在强环境光、反光/黑色物体等corner case下稳定输出正确点云,实现更好的识别和避障效果。

黑色金属垃圾桶
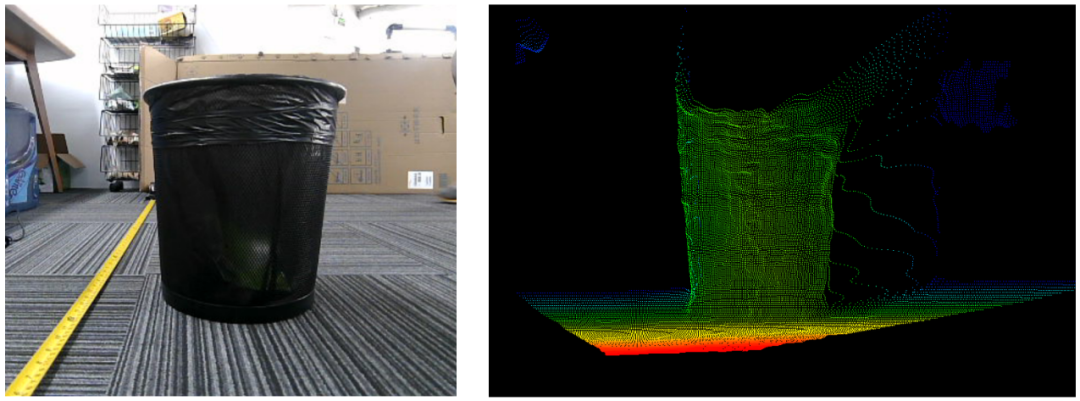
反光地面
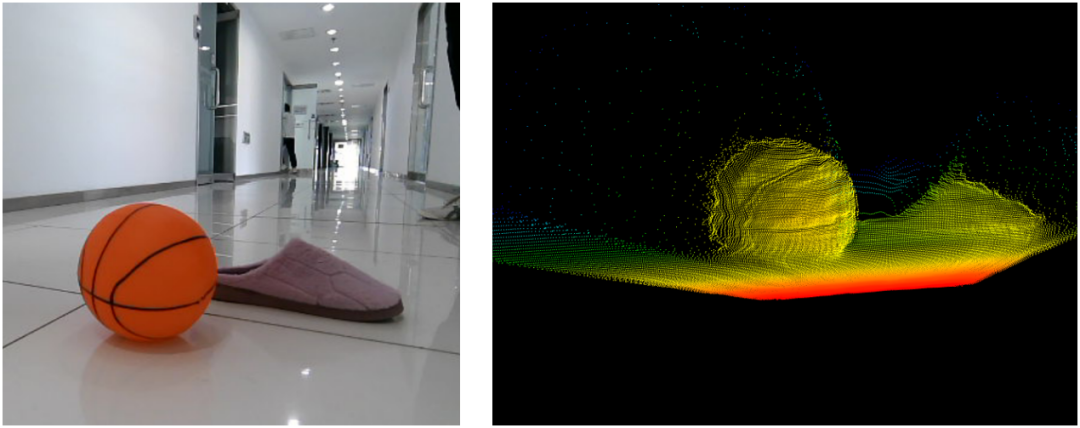
强环境光
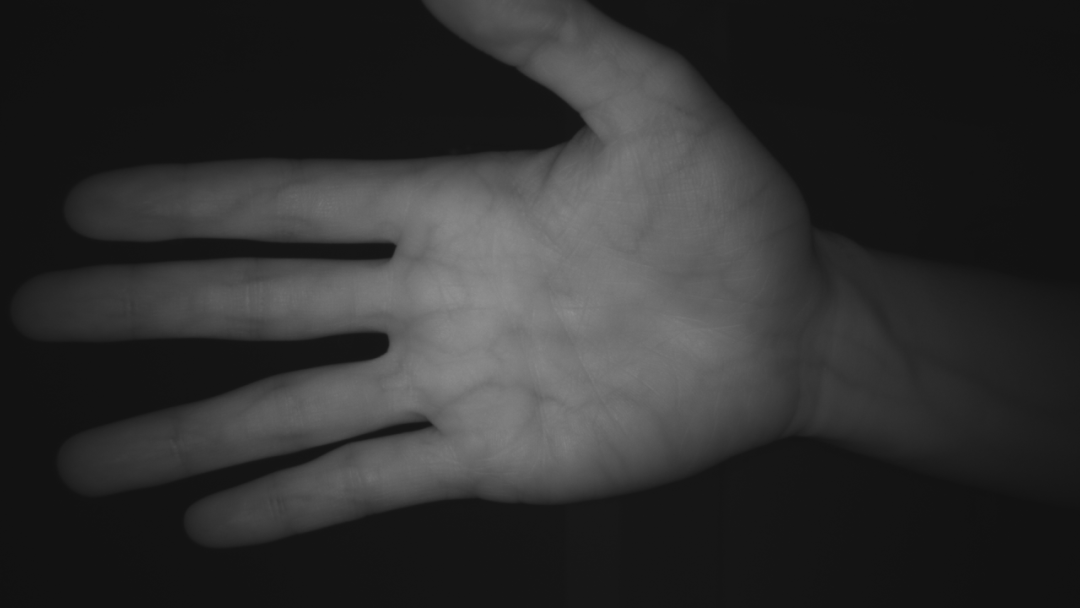
除了3D距离信息,维悟单目3D相机还可以同时输出高分辨率的红外灰度图,例如在生物识别场景中,能够清晰地呈现掌静脉、掌纹等微小细节,为多模态生物识别提供更低成本、更低功耗、更小体积的传感器和解决方案。
维悟单目3D相机作为通用型的3D视觉感知技术,市场应用前景非常广阔。维悟光子团队正在基于领先的光学设计和算法能力,开发更大视场角、更大测量范围的单目红外3D相机和单目RGB-D相机,致力于为机器人、生物识别、手机/电脑、AR/VR、自动驾驶、工业/医疗检测等应用场景提供更优性能和更高性价比的3D视觉感知方案。
-
最新摄像头技术给车辆以强大的视觉功能2017-04-12 7356
-
如何去制作一种单像素成像照片?2021-07-09 1193
-
对3D摄像头和vcesl产业做一个超详细的专业科普2018-02-05 28229
-
高精度三维空间定位之单目空间定位技术解析2018-10-16 12207
-
人脸识别中双目、单目、3D结构光摄像头的区别2020-06-18 31773
-
专访模组厂商:人脸识别中单摄像头和双摄像头该如何选型2020-11-26 3077
-
人脸识别中双目、单目、3D结构光摄像头之间的区别2021-02-26 12575
-
基于全新的单光子成像雷达系统,实现了百公里单光子三维成像2021-03-25 3968
-
工业工厂3D沉浸式三维数字化管理系统2021-09-17 1722
-
基于单层超构表面的单次曝光三维(3D)成像2023-01-14 4362
-
深度解析三维机器视觉成像方法2023-03-17 2171
-
华东师大实现超灵敏、高分辨、大视场的中红外单光子三维成像2023-07-26 3469
-
基于空间结构光场照明的三维单像素成像2023-08-18 1083
-
奥比中光旗下新拓三维发布两款3D扫描双旗舰新品2025-10-16 1016
-
自动驾驶既然有双目摄像头了,为什么还要三目摄像头?2025-12-09 1467
全部0条评论

快来发表一下你的评论吧 !
