

伺服编码器有何特点?如何连接呢?
电子说
描述
EnDat
EnDat(Encoder Data)指变频器通过时钟信号来实现同步传输串口通信,不但可以传送位置值,也可以传送参数值。在编码器的内部有专门的存储区来存放编码器参数,制造商可以利用此存储区来存放编码器的参数。上位机可以发送控制字给编码器。EnDat编码器有以下特点:
①可以读取实际位置;
②电机通信过程中实现零点补偿;
③并行输出增量信号,可以减小对动态特性要求较高的系统的延迟时间;
④数据传输可靠性高;
⑤存储编码器参数,控制器可以自动读取编码器参数,下图所示为在Starter软件中的设定;
⑥支持监控与诊断功能;
⑦传输时间短
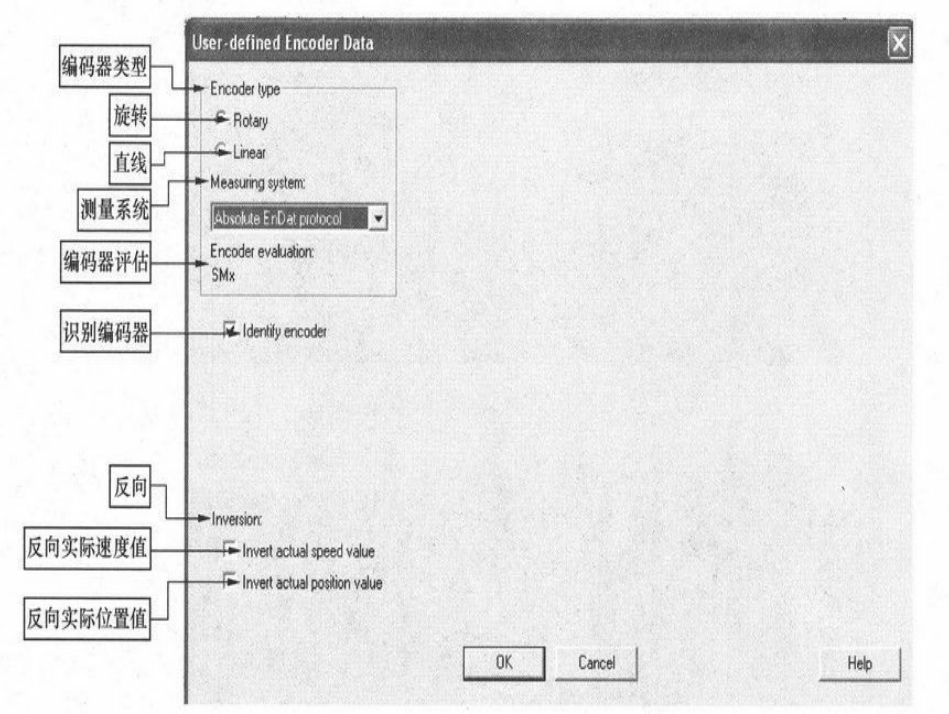
Starter中组态电机时编码自动识别示例
SSI
当多圈编码器检测4096转(12位)而每转又有8092个数据(13位)时,按照正常逻辑需要25个码道,如此多的码道传输需要25根电缆,为了克服多电缆传输的弊端,需要SSI(Synchronous-Serial Interface EIARS-422A or RS-485)通过串口来实现通信,仅需要4根电缆即可以传输所有数据。更少的电缆数扩展了编码器信号的传输距离。数据的传输格式或者是二进制或者是格雷码,靠SSI控制器的时钟来控制触发,不但可以输出绝对位置,还可以输出增量信号数据(最高脉冲数可达512)。
如果驱动SSI编码器,要求上位机对接收到的信号进行计算,如下图所示。
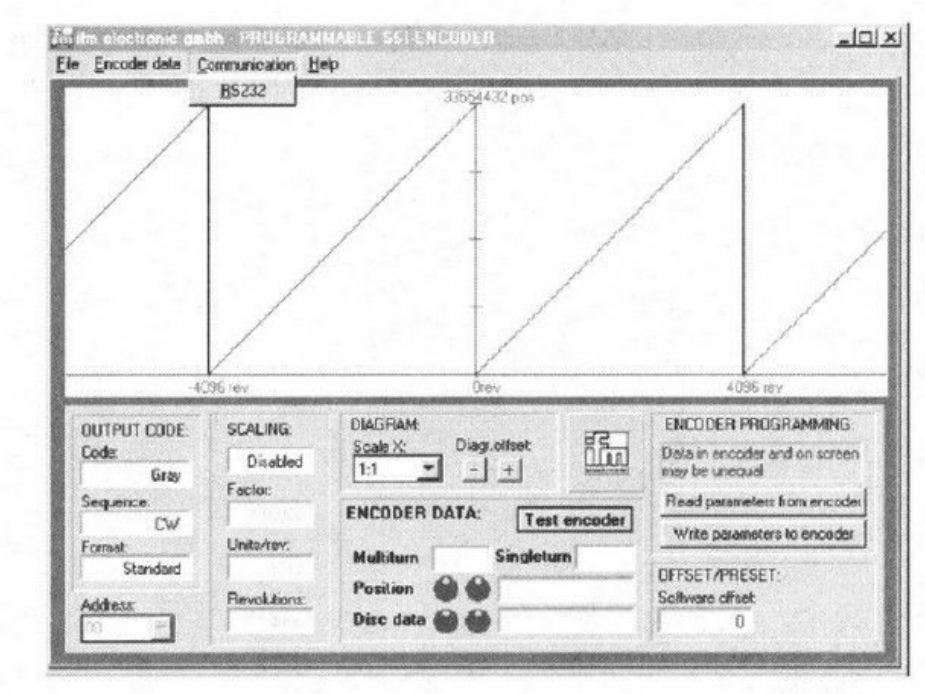
SSI计算软件
在Sinamics S120的控制单元中,也具有SSI的接收编程软件,如下图所示。
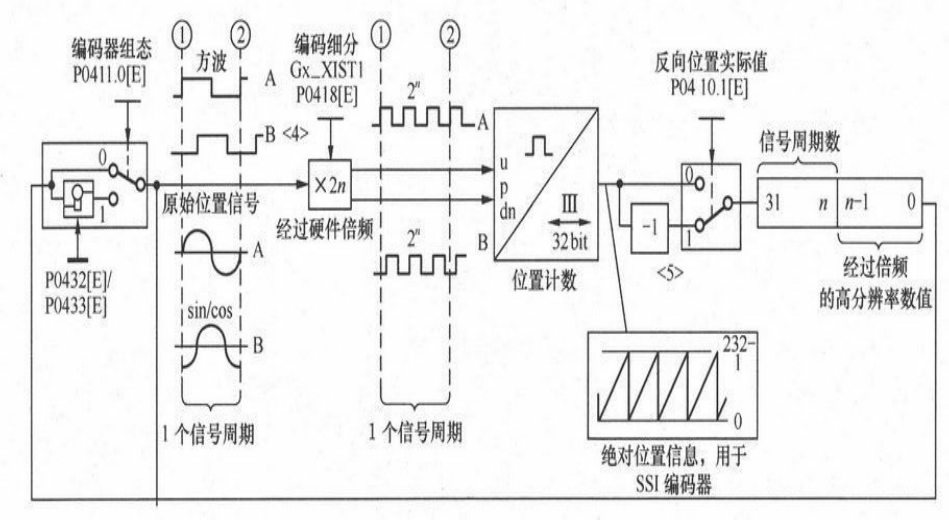
S120中的编码器接收功能图
除了SSI接口的编码器,西门子公司及其他公司都提供了带Profibus-DP接口的编码器,可以同控制器通过DP方式传输数据。传输数据的速率以及编码器的地址文件要参考相应编码器的profile文件。
正/余弦编码器
与脉冲编码器相同,正弦编码器通常有A、B两个信号输出通道,它的特点在于能够将每一个正/余弦波形进一步细化。细化是根据正弦的电压值来进行计算的,这样能够增强编码器的分辨率,如下图所示。
A、B:0.6~1.2V(峰峰值)
~1V(峰峰值):指正弦增量编码器信号的幅值为1V,信号尖峰到参考点的电压值约为0.5V,如下图所示。
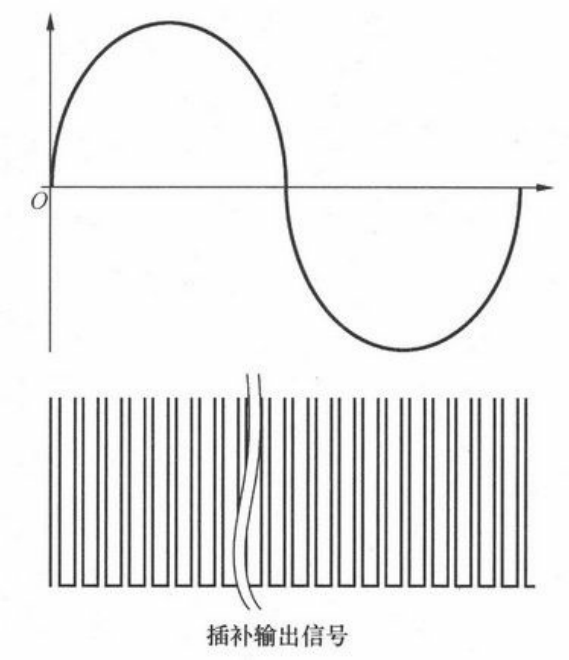
正弦编码器分割
转换码道:通常在选择编码器时在A/BR后面还会发现标有C/D的字符,这是正弦编码器的两个辅助的正/余弦码道,用来提供1转内的绝对位置,同时为驱动器提供了电机的磁极位置,以实现更精确的控制,也就是前面提到的混合式编码器,如下图所示。
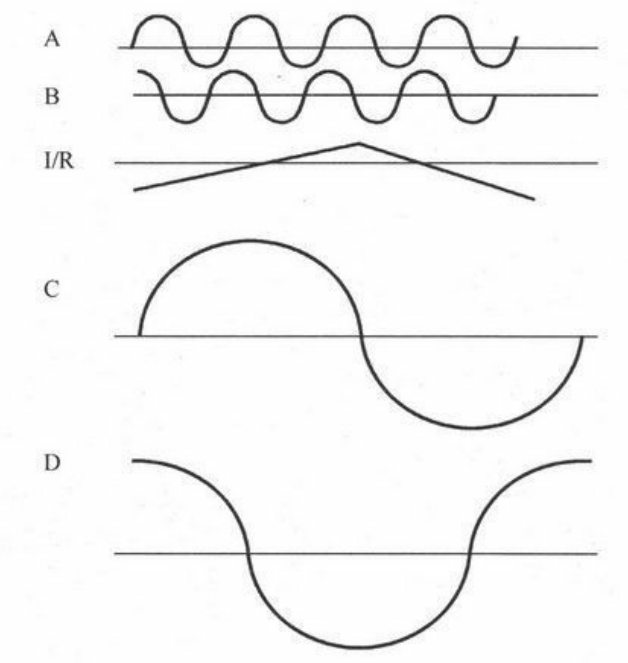
正弦编码器的C/D通道
另外,正/余弦编码器的模拟通道也可以与串口通道同时并存,如下图所示。
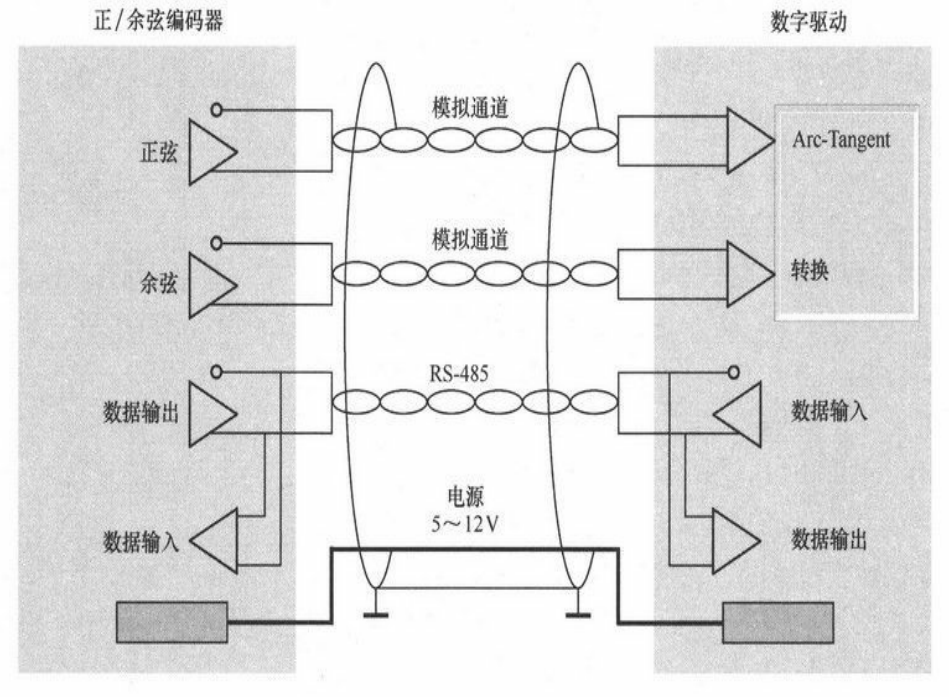
带数据通道的正/余弦编码器
可以说,正/余弦编码器是增量式与绝对值编码器的结合。其中绝对位置采用串口通信的方式传输,而正/余弦信号仍采用模拟信号传输,因为模拟信号传输要求的频率带宽比较窄,容易实现,可以在高速的情况下保证长距离传输。
编码器的相位调整
在对电机进行闭环控制的过程中,必须要知道同步电机的磁极位置,包括增量式编码器、绝对值编码器、正/余弦编码器、旋转变压器等。很多情况下编码器都是集成到电机内部的,所以在安装编码器时就要注意编码器相位的调整,实际上就是要保证编码器的零脉冲与磁极的方向保持一致。
对于输出信号为方波信号的增量式编码器,除了两相正交方波脉冲输出信号A和B及零位信号Z外,还具备互差120°的电子换相信号U、V、W,U、V、W各自的每转周期数与电机转子的磁极对数一致。带换相信号的增量式编码器的U、V、W信号的相位与转子磁极相位的对齐方法如下 :
①用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
②用示波器观察编码器的U信号和Z信号;
③调整编码器转轴与电机轴的相对位置;
④一边调整,一边观察编码器U信号跳变沿和Z信号,直到Z信号稳定在高电平上(在此默认Z信号的常态为低电平),锁定编码器与电机的相对位置关系;
⑤来回扭转电机轴,手移开后,若电机轴每次自由回复到平衡位置时,Z信号都能稳定在高电平上,则对齐有效。
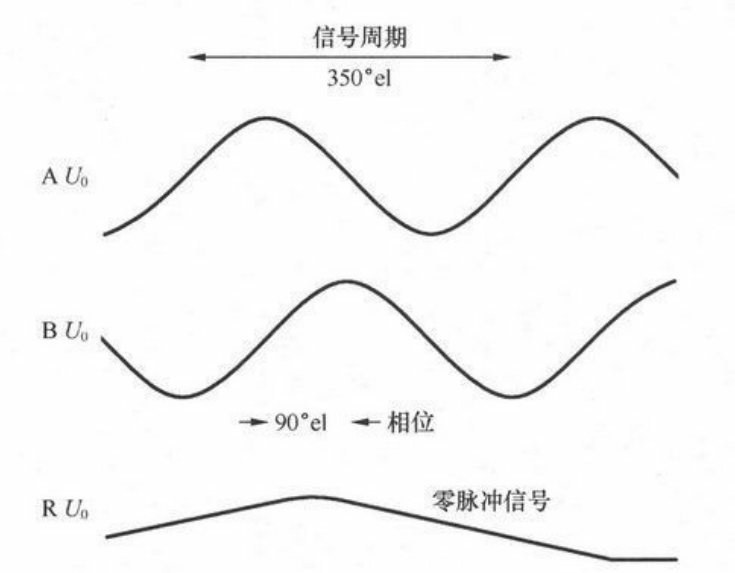
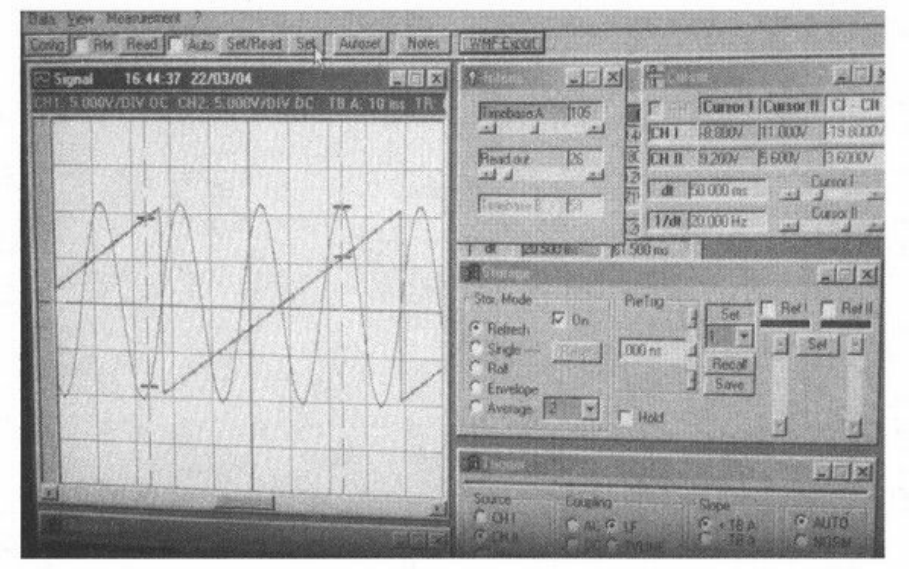
对于带有C、D通道的编码器,除了具备上述正交的正、余弦信号外,还具备一对一圈只出现一个信号周期的相互正交的1V(峰峰值)的正弦型C、D信号,如果以C信号为正弦波,则D信号为余弦波。此外,带C、D信号的正/余弦编码器的C、D信号经过细分后,还可以提供较高的每转绝对位置信息,比如每转2048个绝对位置,因此带C、D信号的正/余弦编码器可以视作一种模拟式的单圈绝对值编码器。这种编码器的极点对齐方式如下 :
①用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
②用示波器观察正/余弦编码器的C信号波形;
③调整编码器转轴与电机轴的相对位置;
④一边调整,一边观察C信号波形,直到由低到高的过零点准确出现在电机轴的定向平衡位置处,锁定编码器与电机的相对位置关系;
⑤来回扭转电机轴,手移开后,若电机轴每次自由回复到平衡位置时,过零点都能准确复现,则对齐有效。
对于没有C、D通道的编码器,可以读取磁极位置处编码器实际反馈的位置值,然后将此值写到编码器内部的存储器中,如带EnDat模式的绝对值编码器中。
对于旋转编码器,有正弦和余弦两组线圈(相差90°),在转子感应高频信号的同时随电机旋转并在定子上感应出正弦和余弦信号。根据正弦和余弦波形可以算出α角度,从而确定转子的位置,如下图所示。
旋转变压器磁极位置对齐
调整方法:示波器的一个通道连接旋变的定子电压信号,另一个通道连接编码器位置信号,用其他装置带动电机旋转,使电机处于发电状态,调整编码器位置使其处于定子电压的零点。另外,可以通过验证旋变的正弦信号包络过零点与电机的UV线反电动势波形由低到高的过零点重合的方式来对齐。
编码器的倍频
编码器的脉冲数决定着位置控制与速度控制的精度,对于2048脉冲的编码器,在不倍频的情况下,每个脉冲对应的精度为0.175°,因此,用此编码器回馈的位置精度肯定要大于0.175°,很难实现精确定位。控制精度要求很高、反应速度要求很快的精密仪器伺服系统,编码器的分辨率要求更高。
不管编码器的信号是正弦信号,还是脉冲信号,都可以对此信号进一步细分,也就是倍频。倍频是通过编码器信号的接收装置将编码器的每个脉冲进一步细分,通过正、余弦信号的高倍率细分技术,可以使正/余弦编码器获得比原始信号周期更为细密的名义检测分辨率,比如2048线的正/余弦编码器经2048细分后,就可以达到每转400多万线的名义检测分辨率。当前很多欧美伺服厂家都提供这类高分辨率的伺服系统,而国内厂家尚不多见。
对于细分来说,也存在着误差。细分的误差不但影响电机的定位精度,还会给电机带来高频的噪声信号。例如,在约翰内斯·海德汉撰写的《满足伺服驱动高动态性能的旋转编码器》一文中就对细分误差影响作了进一步的分析。
编码器的特征参数
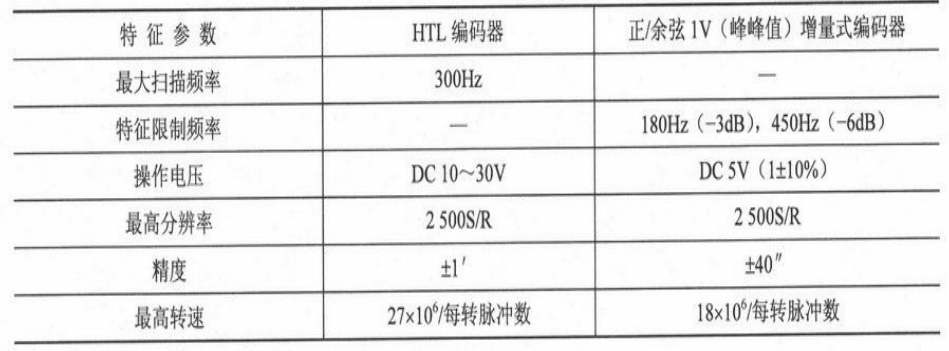
通常情况下,编码器的特征参数包括分辨率、最高支持转速、精度、操作电压。增量式编码器的参数有最大扫描频率,绝对值编码器还有传输速率、通信位数。增量式编码器特征参数如下表所示。
增量式编码器特征参数
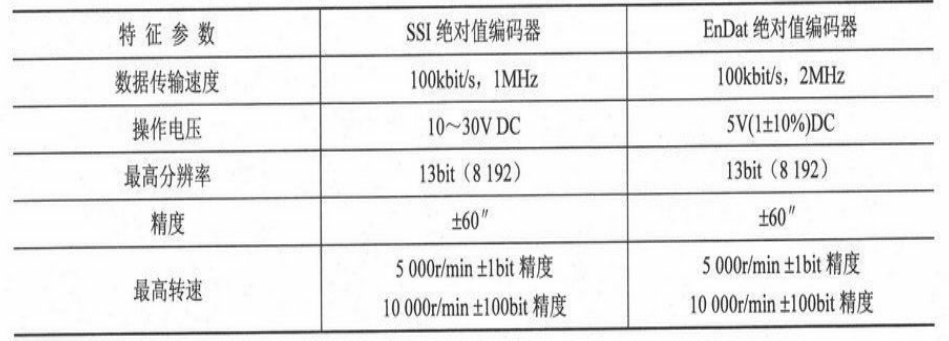
绝对值编码器特征参数如下表所示。
带通信的绝对值编码器特征参数
几种类型编码器特性如下图所示。
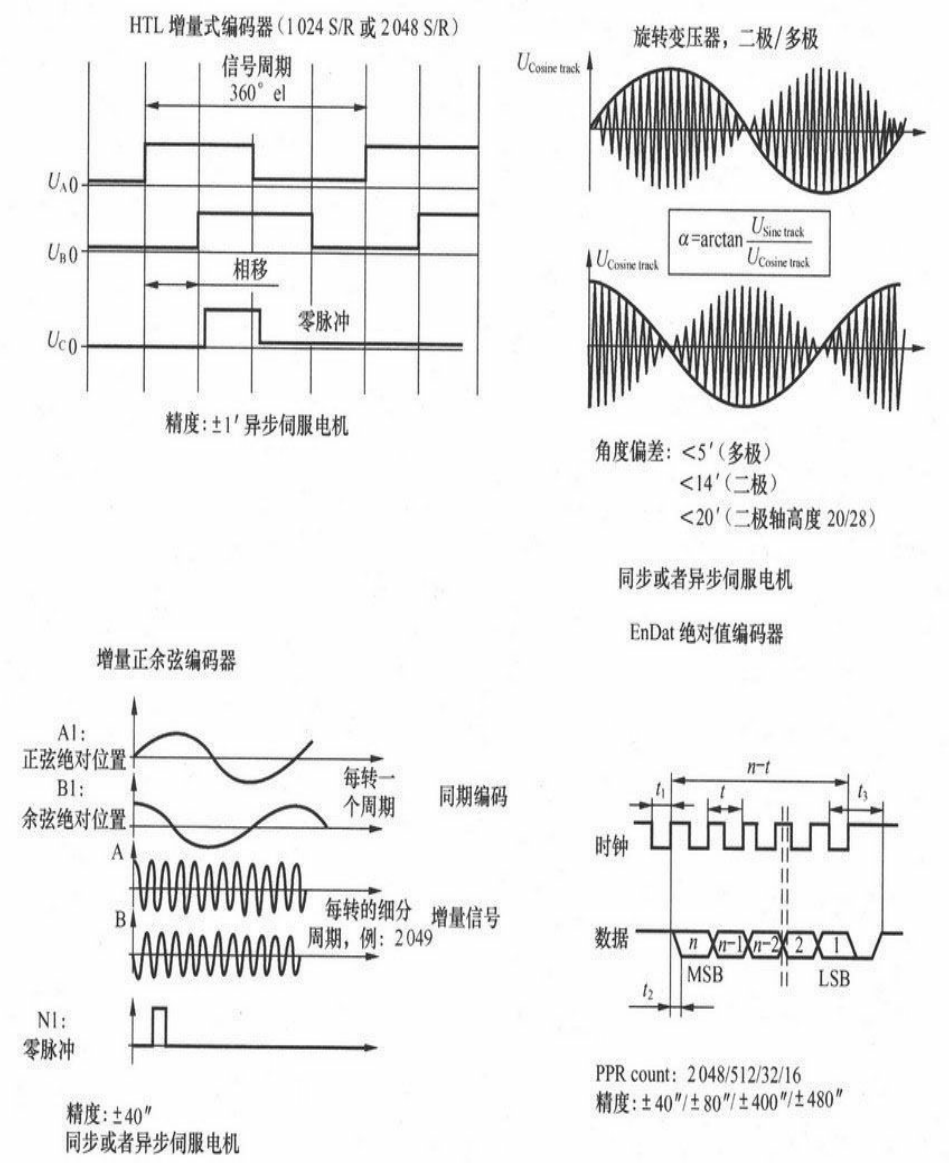
几种类型编码器特性
驱动器与编码器的连接
(1)Sinamics S120
S120是西门子新一代驱动产品,既可以驱动伺服轴又可以驱动矢量轴。当驱动矢量轴时,对于DC/AC设备,可以通过SMC30来连接TTL/HTL以及SSI接口编码器来接收;对于AC/AC设备,有专门的脉冲编码器接口X23来接收编码器信号。当用于伺服控制时,可以接的编码器类型有旋转变压器、增量式(正/余弦)编码器以及绝对值编码器。
S120的控制单元CU320可以同其他模块实现Drive-CLiQ通信,可以从西门子生产的带Drive-CLiQ接口的电机直接读取数据,如下图所示。
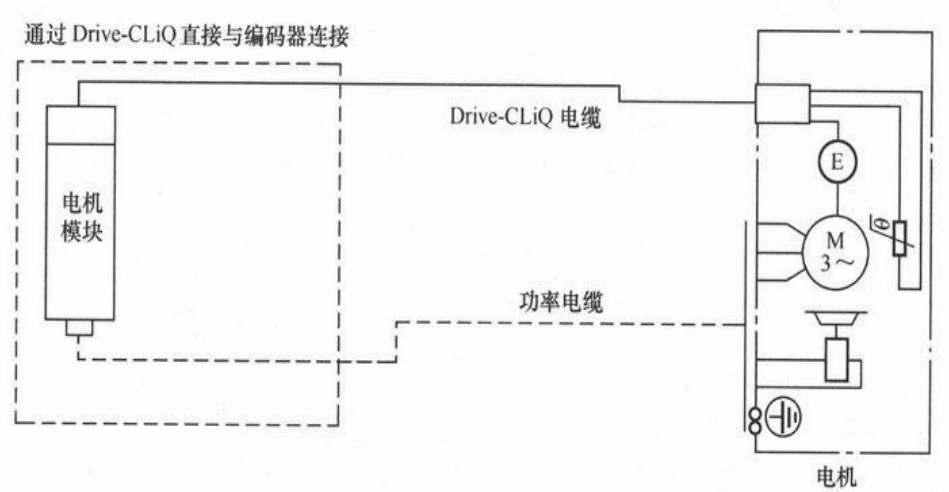
带Drive-CLiQ接口的电机连接图
对于没有Dirve-CLiQ接口的编码器,驱动器可以通过接口模块SMC来接收编码器信号,如下图所示。
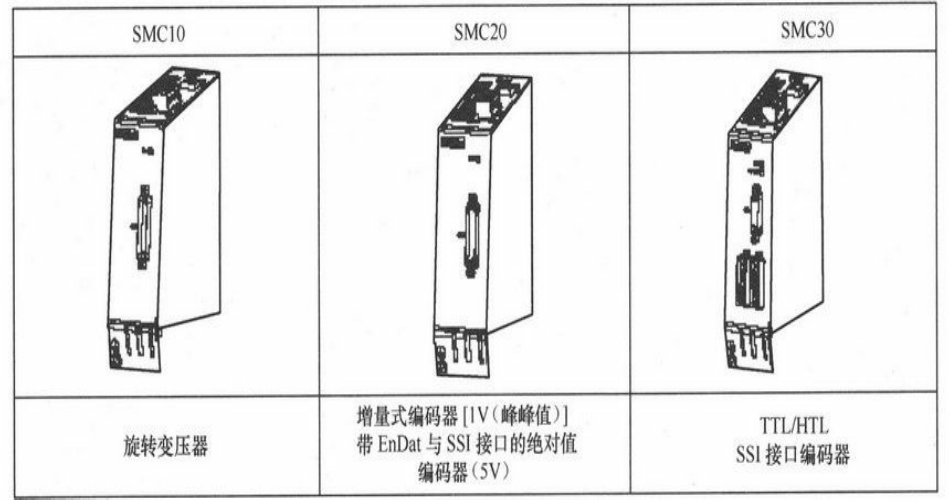
3种编码器适配器SMC
补充:Sinamics G150变频器可以通过SMC30来连接编码器,从而实现矢量控制。连接方法如下图所示。
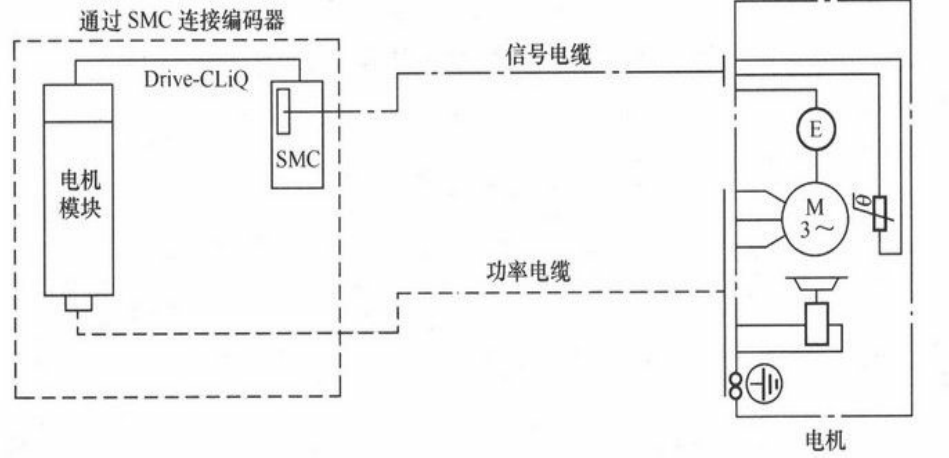
不带Drive-CLiQ接口的电机连接图
另外,不是集成在电机内的编码器可以通过SME接口模块来接收,下图是3种SME接口的示意图。
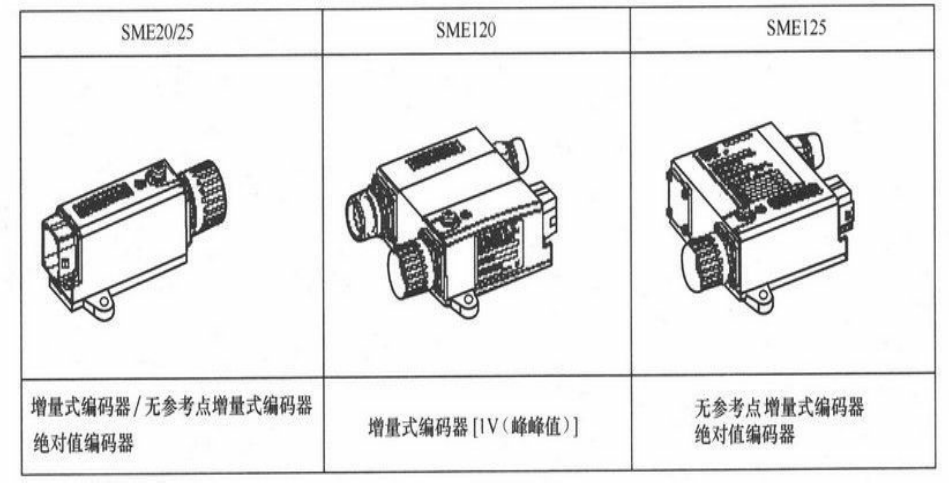
编码器接收适配器SME
外接编码器接口的电机连接图如下图所示。
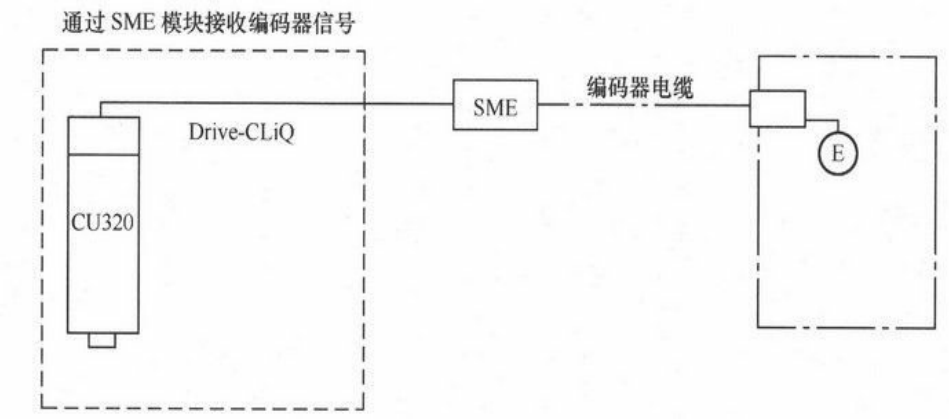
外接编码器接口的电机连接图
2)编码器组态
在西门子电机内部集成了编码器的情况下,集成了Drive-CLiQ接口的电机靠预埋在电机内部的芯片存储电机与编码器数据,因此,在组态的过程中只需选择通过Drive-CLiQ读取。下图所示为Starter中的电机组态。
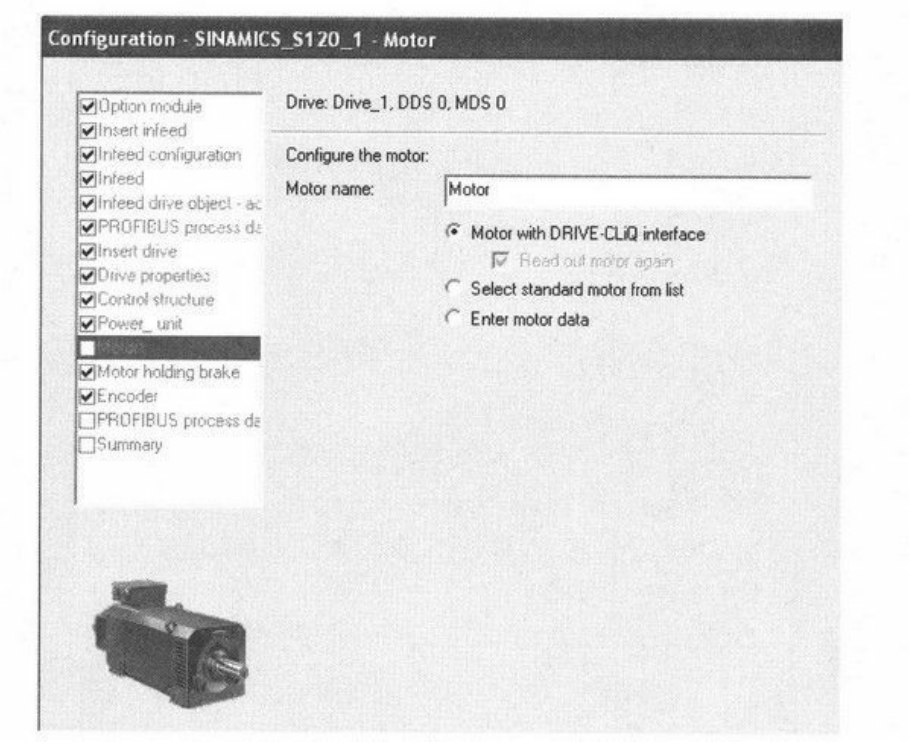
Starter中的电机组态
对于内部没有集成Drive-CLiQ接口的电机,在选定电机后,还要根据电机订货号选择相应的编码器。下图所示为Starter中的编码器组态。
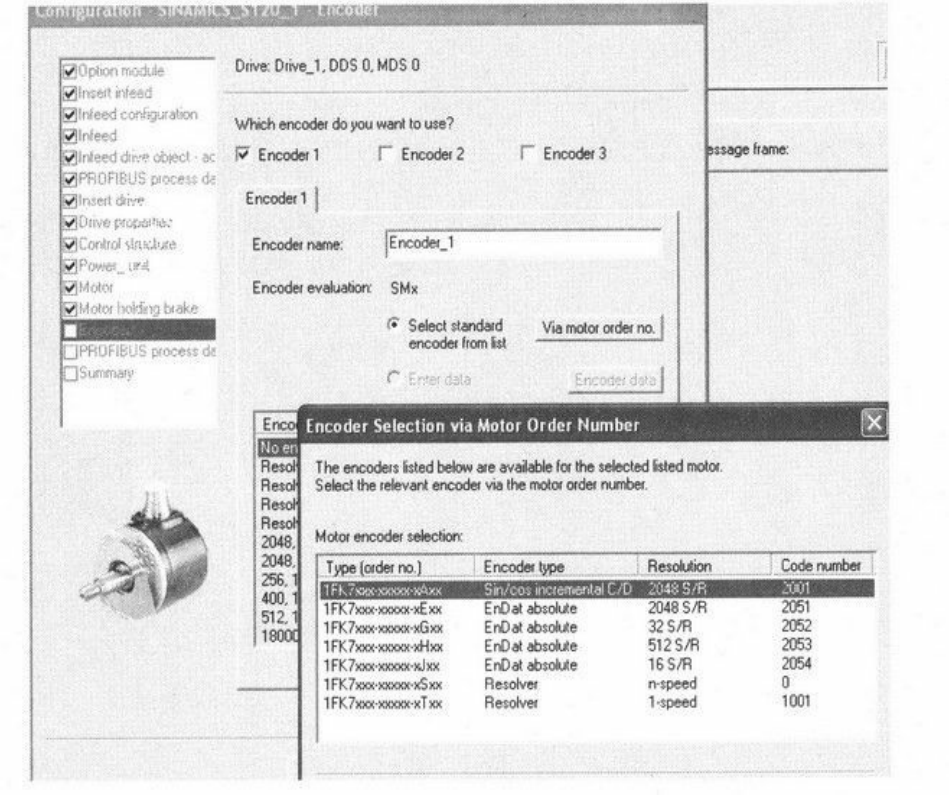
Starter中的编码器组态
对于内部不集成编码器或者非西门子电机,则需要单独设定编码器的数据。下图所示为Starter中的第三方编码器组态。
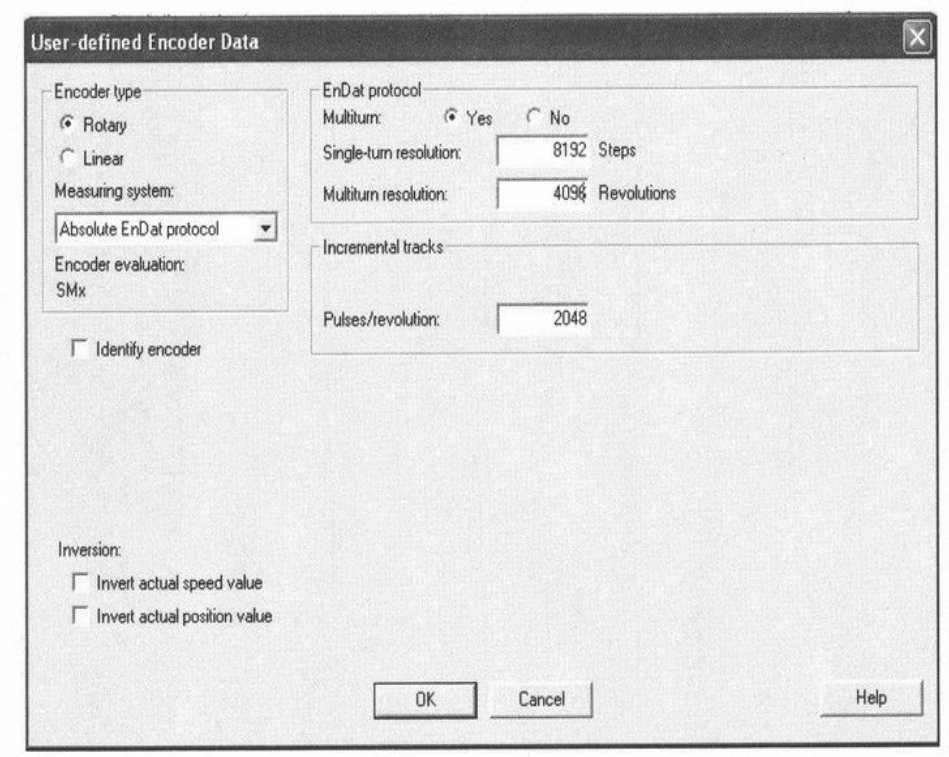
Starter中的第三方编码器组态
除了旋转编码器,S120可以接收直线编码器的信号,通常与直线电机配合使用。直线编码器也有绝对值与增量式之分,参数设置同旋转编码器类似。
(3)带有Profibus-DP接口的编码器
除了常规接口编码器,西门子还为用户提供了带有Profibus-DP接口的编码器,即集成了脉冲接收处理回路的编码器。这种编码器可以通过从站的方式与Profibus-DP的主站进行通信。这时编码器作为一个标准的从站,与主站通过报文进行数据交换。硬件组态如下图所示。
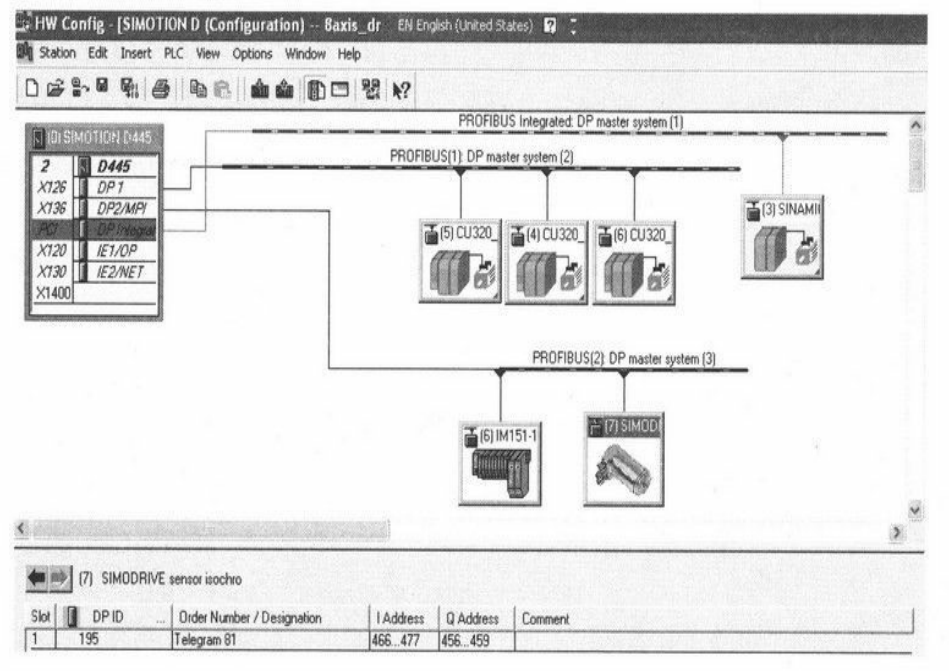
编码器作为从站的硬件组态
审核编辑:刘清
-
宜科电子伺服编码器产品特点2024-12-12 1082
-
伺服编码器接线方法 伺服编码器线可以自己延长吗?2024-12-09 4888
-
伺服电机编码器种类有哪些?2024-07-21 4106
-
伺服电机编码器原理及编码器分类2023-09-22 2756
-
伺服电机编码器分类2023-08-25 4843
-
伺服电机编码器2023-06-26 2526
-
伺服电机编码器基础简介2023-02-24 4000
-
直流伺服电机控制器和编码器有什么关系呢?2021-08-27 4817
-
伺服电机编码器原理_伺服电机编码器种类2019-11-07 11693
-
伺服电机编码器维修2019-11-06 13827
-
伺服电机自带编码器为什么还要外加编码器?2018-02-03 64050
-
伺服电机编码器原理(伺服电机编码器几根线以及接线图)2017-11-10 138238
全部0条评论

快来发表一下你的评论吧 !
