

基于FPGA的红外遥控接收器模块数据传输
可编程逻辑
描述
简介
本例是FPGA之旅设计的第十四例,本例将红外遥控的使用,并将红外接收器接收到红外遥控的数据显示在数码管上。
红外遥控接收器模块,非常简单,也是由GND,VCC和数据三个引脚组成,通过杜邦线可以直接连接在FPGA的IO口上,产品细节如下
红外数据传输
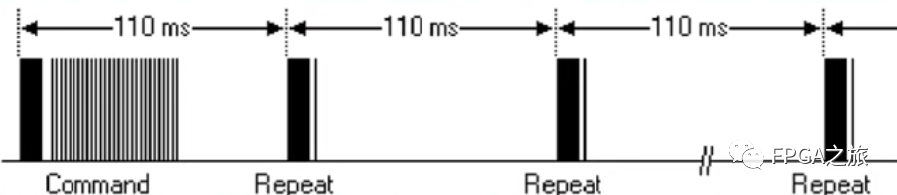
数据传输过程如下
引导码:标志的数据传输的开始。
数据码:传输红外遥控发送的数据,一帧数据共有32bit,4个字节。分别为**地址,地址反码,数据,数据反码。**先发送**低**位。
停止码:标志着数据传输的完成。
重复码:当一直按下某个按键的时候,并不会再次发送数据,而且通过重复码标志按键一直处于按下的状态。如果一直按下的话,约110ms,发送一次重复码。

在对数据传输过程有了个大致的了解后,下面就对每个部分进行详细的讲解。
所有波形都是对于遥控器来说的
1
引导码
引导码波形如下,遥控器先发送9ms的信号,然后空闲4.5ms后,引导码结束。
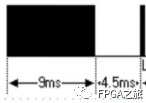
这个时候在开发板上结束到的电平变化为,9ms的低电平,4.5ms的高电平。也就是说,遥控器发送信号的时候,接收器上为低电平,遥控器空闲时,接收器上为高电平,这点在处理的时候需要注意。
2
数据码
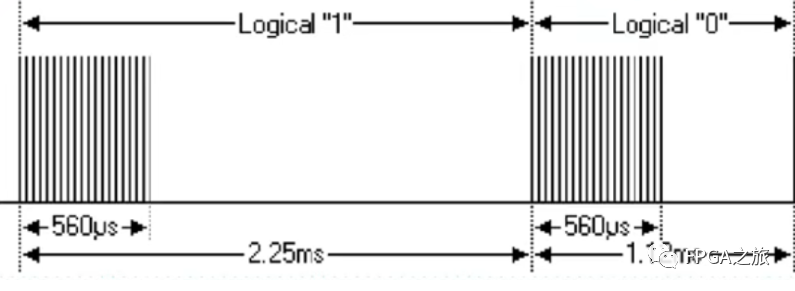
数据码主要是看,数据0和数据1是如何表示的。通过下图可知,数据1是560us的信号,加1.69ms的空闲。数据0是560us的信号,加560us的空闲。知道了数据是如何表示的后,在接收的时候,只需要按照波形接收32bit的数据即可。
3
结束码
在最后一个数据接收完成了,遥控器会发送560us的信号,然后空闲,表示发送结束。

4
重复码
重复码,是和引导码对应的,如果发送的是重复码的话,引导码中的空闲4.5ms,会变成2.25ms,然后直接进入结束吗。根据空闲时间的长短,可以判断是引导码,还是重复码。
了解了其发送的波形变换情况,就可以进行代码的编写了。
Verilog代码实现
1
端口信号确定
端口信号很简洁,当接到一次红外数据的时候,infrared_end,就会拉高一个周期。
Infrared_Reception( input sys_clk, input rst_n, input infrared, //红外信号IO output infrared_end, //接收数据完成 output[7:0] infrared_data //接收到的数据 );
2
状态确定
通过上面的分析可知,一共可以分为如下四个状态。I_START其中包括引导码和重复码,根据时间可以确定,下一个状态该跳转到那。
通过上面的分析可知,一共可以分为如下四个状态。I_START其中包括引导码和重复码,根据时间可以确定,下一个状态该跳转到那。
localparam I_IDLE = 'd0; //空闲态 localparam I_START = 'd1; //开始态,也就是引导码阶段 localparam I_DATA = 'd2; //数据态 localparam I_END = 'd3; //结束态
3
状态机跳转
always@(*) begin case(state) I_IDLE: if(infrared_negedge == 1'b1) next_state <= I_START; else next_state <= I_IDLE; I_START: if(infrared_negedge == 1'b1) if(time_cnt < Infrared_Time2_25ms) //表示重复码,直接放回上一次的接收值 next_state <= I_END; else next_state <= I_DATA; else next_state <= I_START; I_DATA: if(infrecv_bit_cnt == 'd31 && infrared_negedge == 1'b1) next_state <= I_END; else next_state <= I_DATA; I_END: if(infrared_posedge == 1'b1) next_state <= I_IDLE; else next_state <= I_END; default: next_state <= I_IDLE; endcase end
效果图如下。
编辑:黄飞
-
基于FPGA的高效内存到串行数据传输模块设计2025-11-12 4766
-
基于FPGA的红外遥控信号接收模块的设计2011-07-11 5083
-
无线数据传输传送收发遥控器2013-07-08 2500
-
基于FPGA的高速LVDS数据传输2014-03-01 7025
-
单片机红外数据传输2014-07-12 2971
-
精确接收器延迟改善数据传输2019-07-25 1703
-
微型全集成化红外遥控接收器2009-04-29 881
-
红外遥控接收器中带通滤波器的设计2009-12-14 946
-
红外遥控接收器电路图2009-05-13 4678
-
基于USB2.0的红外数据传输系统的设计与实现2010-03-13 2120
-
一种基于FPGA的IPv6主机数据传输模块设计2016-01-04 618
-
WNS无线数据传输模块2017-09-25 1138
-
DN129-精密接收器延迟改进数据传输2021-04-30 822
-
Vishay红外接收器模块:优化短脉冲遥控系统设计2026-05-12 607
-
高速差分接收器SN65LVDS系列:提升数据传输性能的理想之选2026-06-17 287
全部0条评论

快来发表一下你的评论吧 !
