

MEMS_惯性传感器16-磁力计椭球拟合校准步骤
MEMS/传感技术
描述
1. 概述
磁力计椭球拟合校准是一种将磁力计测量数据校准到真实磁场的技术。这种技术通常使用椭球模型来拟合磁力计的测量结果,然后通过最小二乘法来找到拟合参数的最优解。
2. 总体思想
磁力计椭球拟合校准的思想包括以下几个步骤:
数据预处理:首先,需要对磁力计测量数据进行预处理,例如滤波、去偏移等操作,以去除数据中的噪声和误差。
椭球模型选择:选择一个合适的椭球模型,用于拟合磁力计测量数据。常见的椭球模型包括静止椭球、旋转椭球和倾斜椭球等。
参数估计:使用最小二乘法,估计椭球模型的参数,使得拟合结果与磁力计测量数据吻合。
参数校准:通过实验或其他方法,对椭球模型的参数进行校准,使其更接近真实磁场。
误差分析:评估椭球拟合校准的误差,并对其进行分析和优化。
总之,磁力计椭球拟合校准的思想是通过对磁力计测量数据进行拟合和校准,从而得到更准确的真实磁场测量结果。
3. 理论
椭球面的标准方程为:

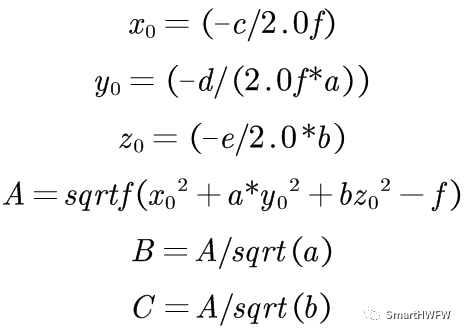
需要拟合的参数有x0 、y0 、z0 、A、B、C六个,他们分别是椭球的中心和半轴长。
将标准方程写成一般形式为:

通过对参数a、b、c、d、e、f 的求解间接求出参数x0 、y0 、z0 、A、B、C。
4. 拟合过程
① 建立误差方程
② 求误差平方和

求偏导数并令其为0:
计算可得(这里的x,y,z及其各次项的组合均表示其统计均值。)
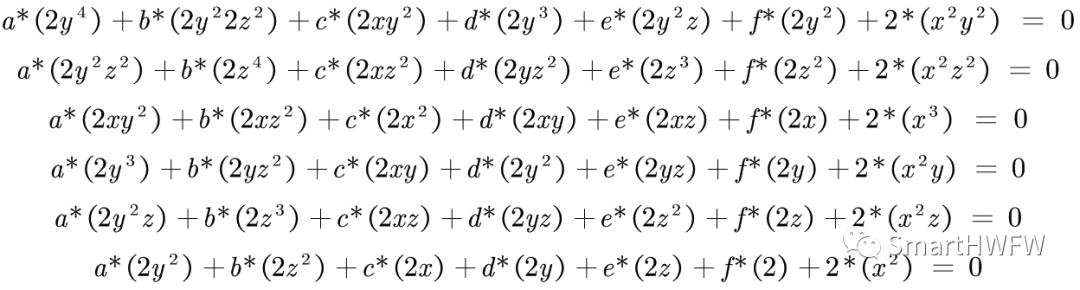
解方程组可得a、b、c、d、e、f进而可得x0 、y0 、z0 、A、B、C。
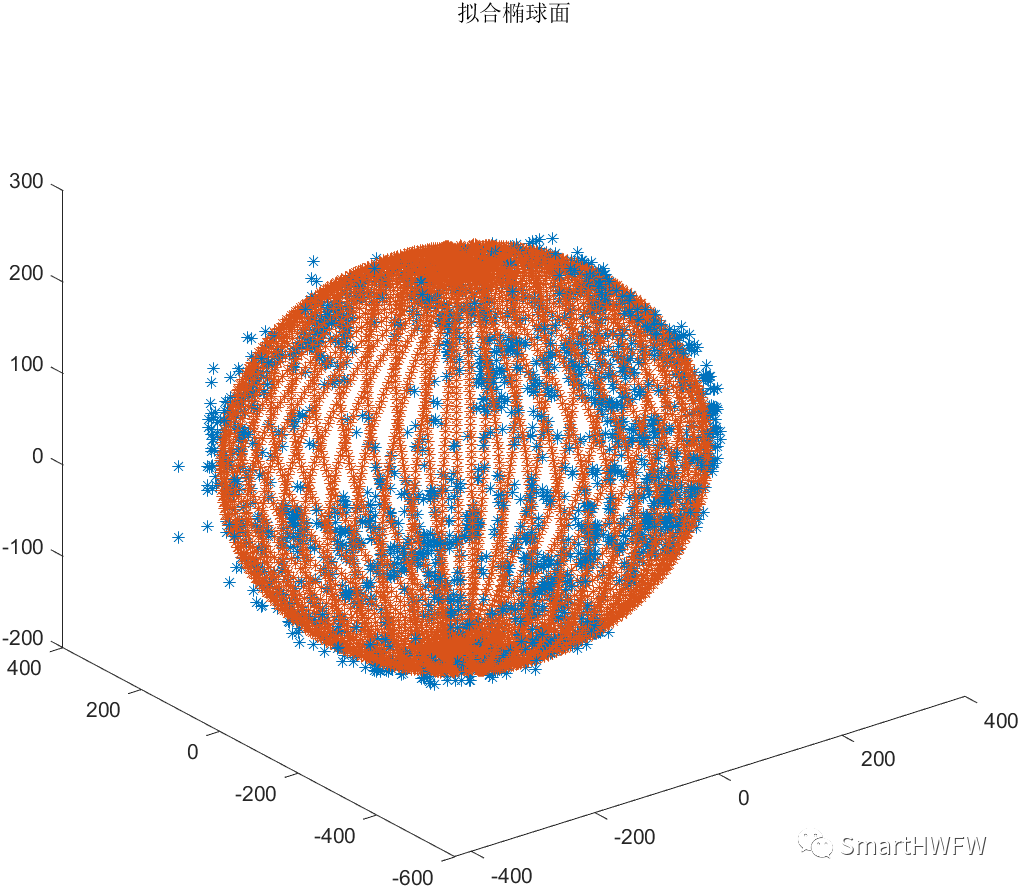
5. MATLAB仿真效果
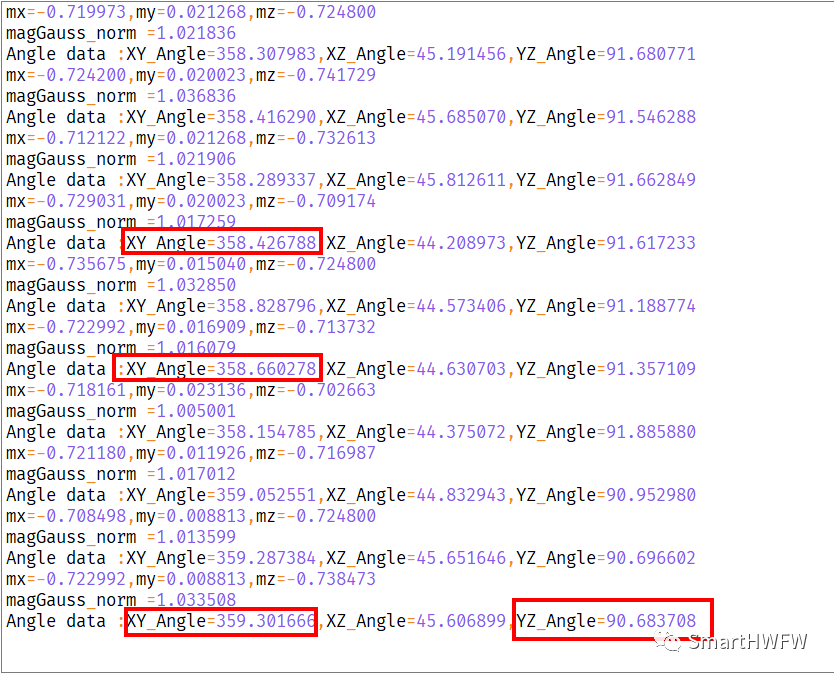
6. C语言验证结果
在上电之前后,校准的过程中地磁传感器作绕 “8”字型运动,否则 mx,my,mz 为nan无效值
串口助手获取数据和手机指南针数据对比

通过NOAA网站查所在地区的地磁场详细参数
编辑:黄飞
-
磁力计LIS2MDL开发(4)----MotionMC 执行磁力计校准2024-08-26 5088
-
10自由度MEMS惯性传感器ADIS164802018-10-15 2409
-
请问通常使用的磁力计、加速度计、陀螺仪等传感器在安装之前为什么要先校准?2019-06-17 3055
-
请问加速度计要不要校准?2019-06-20 2519
-
惯性测量单元3DM-GX5-15 传感器2020-12-07 921
-
可以使用X-Cube-MEMS1库将磁力计传感器设置为输出中断吗2022-12-26 608
-
LIS2MDL磁力计传感器相关资料2023-09-13 1038
-
霍尼韦尔高可靠性和高坚固性的9轴MEMS惯性传感器2019-01-30 8761
-
怎样随时重新校准磁力计2019-10-23 8721
-
用于传感器校准的椭球或球面拟合的设计提示资料说明2019-12-31 1271
-
技术分享:九轴传感器之磁力计2020-12-25 2449
-
IMU中三轴加速计、陀螺仪和磁力计的工作原理2020-12-26 17002
-
ADIS16405:带磁力计的三轴惯性传感器数据表2021-05-09 982
-
ADIS16400:带磁力计的三轴惯性传感器数据表2021-05-23 1042
-
驱动LSM6DS3TR-C实现高效运动检测与数据采集(11)----磁力计校准2024-08-23 3301
全部0条评论

快来发表一下你的评论吧 !
