

GPU在雷达信号处理算法中的优势
描述
雷达信号处理算法对计算机架构提出了很高的实时性要求。好在这些算法具有数据并行性,可以在大规模并行架构(如图形处理单元(GPU))上获得出色的性能。
通过CUDA和OpenCL(开放计算语言)架构,使用GPU进行非图形处理已成为可能。这篇文章旨在评估Nvidia GT200系列GPU架构在雷达信号处理应用中的性能。
通过将GPU(GTX260)与桌面CPU进行比较,共比较了12个HPEC(高性能嵌入式计算)和其他雷达信号处理算法。也涉及了其他几个方面,例如编程环境和效率、未来GPU架构以及在雷达系统中的适用性。
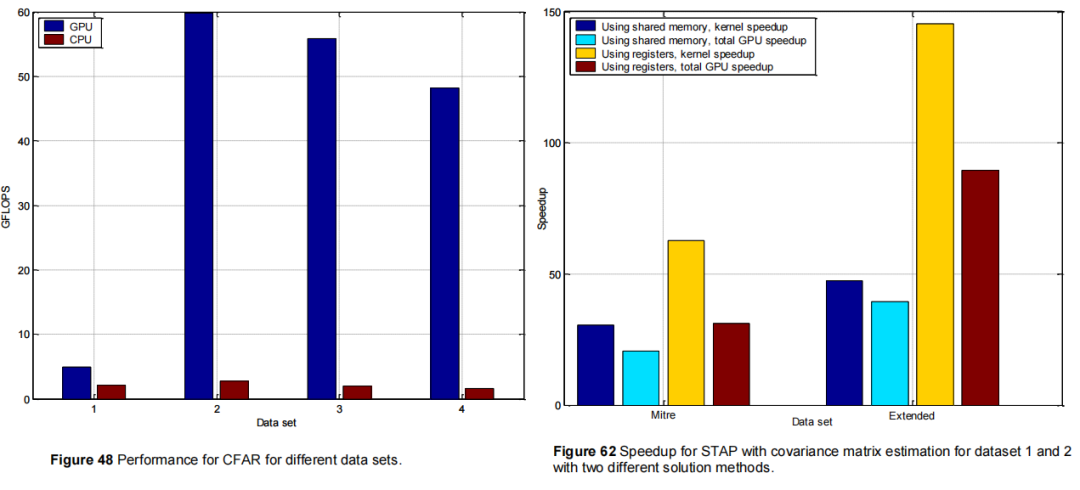
CUDA GPU实现在测试的12个算法中的11个上表现显著优于CPU及其相关CPU代码,有时性能提升可达100倍或更多。OpenCL的实现也比CPU表现得要好得多。
几乎所有的基准测试在使用CUDA时取得的显著性能可以归因于GPU的高性能,以及几乎所有待测算法的数据都具有并行性,因此几乎所有的这些算法都适合GPU。
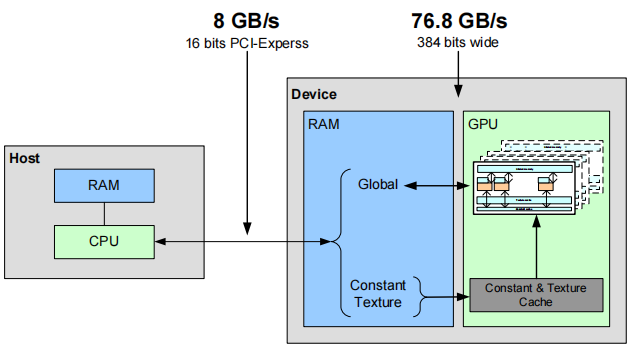
GPU与CPU之间的协作主要通过数据传输和任务分配来实现。在雷达信号处理中,GPU主要用于加速信号处理算法的执行,可以实现比CPU更快的速度和更高的性能,尤其是在处理大量雷达相关数据时,GPU的处理速度可以达到CPU的100倍以上。
此外,GPU在能源效率方面也优于CPU,它的GFLOPS/W的比率远高于普通CPU。因此,从性能角度看,使用GPU进行雷达信号处理是可行的。GPU的开发并非毫无挑战,开发者需要对算法、CUDA硬件以及如何并行化算法有深入的理解。
STAP(空时自适应处理)算法在雷达信号处理中是非常关键的,它用于优化雷达的探测和跟踪性能,通过空间和时间滤波减少干扰。在实际操作中,由于涉及到大量的矩阵运算和并行处理,这在计算上是相当密集的。而STAP算法通常涉及到大量的并行矩阵运算,这是GPU擅长的。
将STAP算法实现到GPU平台上,可以考虑多种并行策略和内存使用策略。尽管重线程(heavy-thread)实现方式可能在实现上更为复杂和挑战性,它的性能优势常常被视为值得的。在实际的算法和应用实现过程中,程序员可能需要权衡编程复杂度和性能的提升,找到最适合实际问题和硬件环境的解决方案。
在雷达信号处理中,GPU还可以有效地应用于以下一些主要算法中:
1. 脉冲压缩:脉冲压缩是雷达信号处理中的一种重要技术,用于提高雷达的分辨率而不增加峰值功率。脉冲压缩涉及到复杂的傅立叶变换和相关运算,这些运算可以在GPU上并行执行,从而显著提高处理速度。
2. CFAR检测:恒虚警率(Constant False Alarm Rate,CFAR)检测是雷达系统中用于检测目标的一种常用技术。CFAR算法包含大量的排序和比较操作,这些操作可以在GPU上并行执行,提高算法的执行效率。
3. 雷达成像:雷达成像通常涉及到复杂的信号处理和图像处理技术,如合成孔径雷达(SAR)成像和多输入多输出(MIMO)雷达成像。这些成像技术中的许多运算,如反演、滤波和重建,都可以在GPU上并行处理,从而大幅度提升处理速度。
4. 杂波和干扰抑制:雷达信号处理需要进行大量的杂波和干扰抑制,如海杂波抑制和道路杂波抑制。这些算法通常涉及到大量的矩阵运算和统计运算,这些运算也适合在GPU上并行执行。
5. 多目标跟踪:在雷达系统中,需要对多个目标进行跟踪。这些算法,如多目标跟踪(Multi-Target Tracking,MTT)和多传感器数据融合,涉及到大规模的数据处理和大规模的计算,这些任务可以在GPU上并行处理,从而提高处理速度。
审核编辑:汤梓红
-
C语言实现数字信号处理算法2012-08-16 3833
-
如何去使用数字信号处理算法2021-08-09 1524
-
什么是ECG信号的预处理算法和R波定位算法?2021-11-22 3846
-
基于DSP的实时信号处理算法研究2009-05-09 473
-
基于图像特征的机载正交雷达网空时处理算法2009-11-18 740
-
数字信号处理算法程序2016-01-19 869
-
DSP6748信号处理算法2016-05-19 867
-
基于FPGA的数字信号处理算法研究与高效实现2016-08-29 895
-
FPGA信号处理算法设计、实现以及优化(南京)2016-12-26 918
-
变换域全相位信号处理算法2017-01-07 884
-
弹载雷达红外复合系统信息融合处理算法2017-11-15 1175
-
基于GPU的Prewitt算法实现及其在探地雷达中的应用2017-12-14 815
-
如何使用FPGA实现数字信号处理算法的研究2021-02-01 1545
-
数字信号处理算法电子版资源下载2021-07-18 1577
-
基于python的天线阵列的信号处理算法2022-10-19 4467
全部0条评论

快来发表一下你的评论吧 !
