

立功科技第二代超声波雷达(AK2)解决方案
描述
本文导读
超声波在日常生活中无处不在,在医疗领域,借助超声波可用于洗牙、协助诊断各种疾病;在汽车领域,利用超声波可探测障碍物到车辆的距离。本文为大家介绍立功科技第二代超声波雷达(AK2)的解决方案。
超声波雷达在汽车上是一个很重要的传感器,其有效帮助车主在倒车时探测车辆附近肉眼看不到的障碍物,大大增强倒车安全性,随着汽车在智能化的发展,超声波雷达除了用于探测障碍物距离外,还可用于车位检测,协助车辆自动泊车。
下面给大家科普超声波雷达如何生成超声波及测距的原理:首先超声波雷达探芯由压电式陶瓷晶片组成,在高压的PWM信号作用下周期性的震动,从而形成超声波;超声波在空气中传播,在遇到障碍物时会把部分的超声波反射回来,超声波雷达接收回来的反射信号后,通过处理可以得到障碍物的飞行时间(TOF),然后通过飞行时间计算障碍物的距离,公式为:D = (V * TOF)/2 其中D为障碍物距离,V为超声波传播速度,常温下为343m/s。
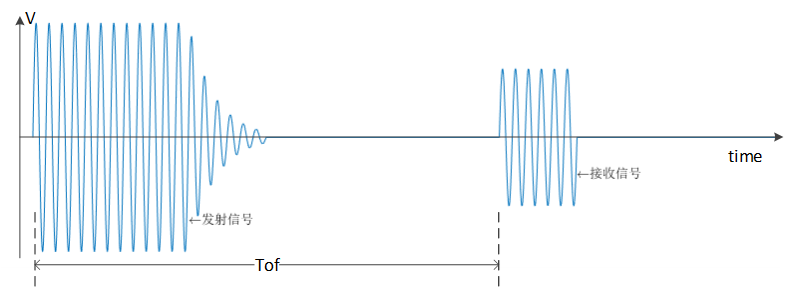
图1 超声波雷达收发信号示意图
AK2超声波雷达性能提升
AK2作为第二代超声波雷达,相比第一代超声波雷达在各个方面都有所提升。
1)AK2采用通信方式是DSI总线:
在通信速率方面,最高可达444kbit/s,具备大量数据周期性传输功能。
在数据可靠性方面,AK2作为DSI从机,和DSI主机E521.42通信,依据DSI反馈的状态及CRC校验信息来增强数据的可靠性。
2)AK2新增了跳频测量方式,即发射超声波的频率可随时间变化而变化,提高了抗干扰能力;
3)AK2支持功能安全ASIL B等级;
4)AK2除了可以获取回波的飞行时间、宽度以及峰值信息外,还提供回波的波峰、波谷及上/下穿阈值线信息。
立功科技AK2方案介绍
本方案ECU主控制器是采用的NXP车规级的S32K144芯片,通信驱动芯片采用单个E521.42,E521.42芯片拥有两条DSI通道,每条通道连接6个E524.17。其中主控负责控制各个探头进行障碍物测量或诊断,并整合各个探头测量结果打包上传至车身CAN,而E521.42作为“中转站”,将主控传来的SPI控制信号转换成DSI信号传输给E524.17,将E524.17反馈回来的测量数据转换成SPI信号传输给主控MCU,E524.17负责障碍物检测,当收到E521.42请求信号时,根据请求的类型执行相应动作,如障碍物距离测量、测量参数配置或诊断。
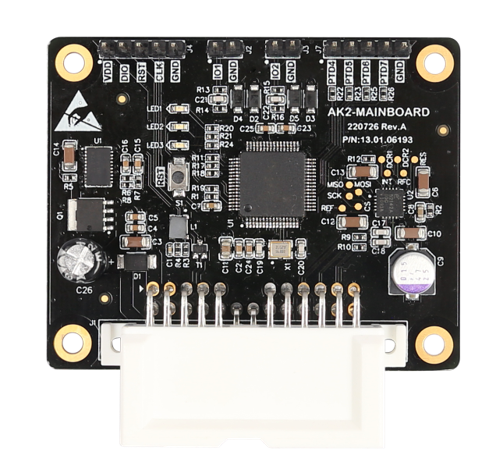
图3 立功科技AK2 ECU示意图
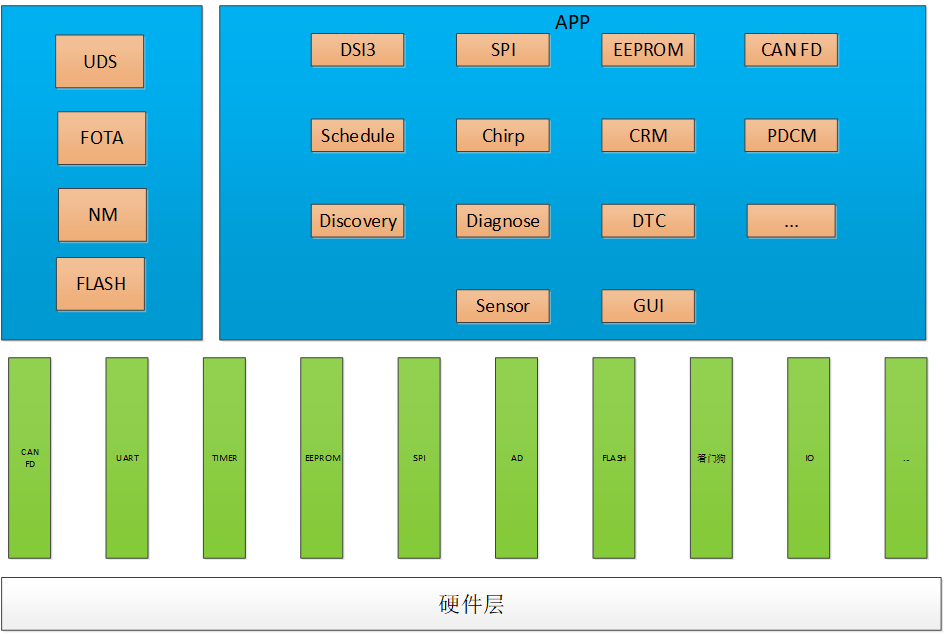
图4 立功科技AK2 ECU软件架构
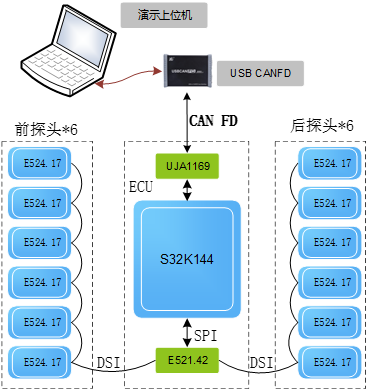
图5 系统架构
AK2超声波方案优势
在ECU端的优势有:
主机量产硬件开发支持;
主机量产软件;
完整的CAN协议栈功能;
动态实时配置探头测量数据;
探头在测量过程中的波形显示;
提供SDK包供域控制器集成。
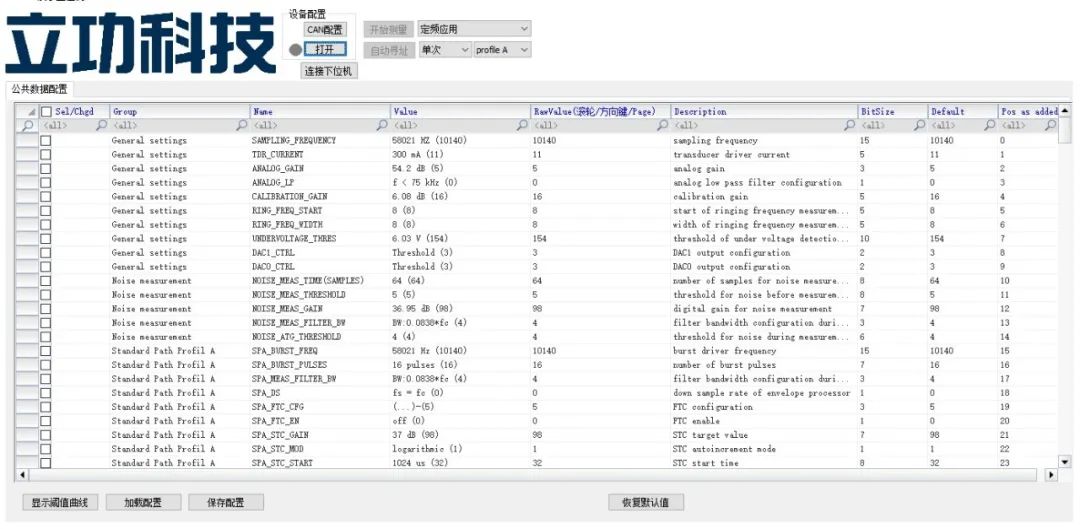
图6 探头部分配置列表
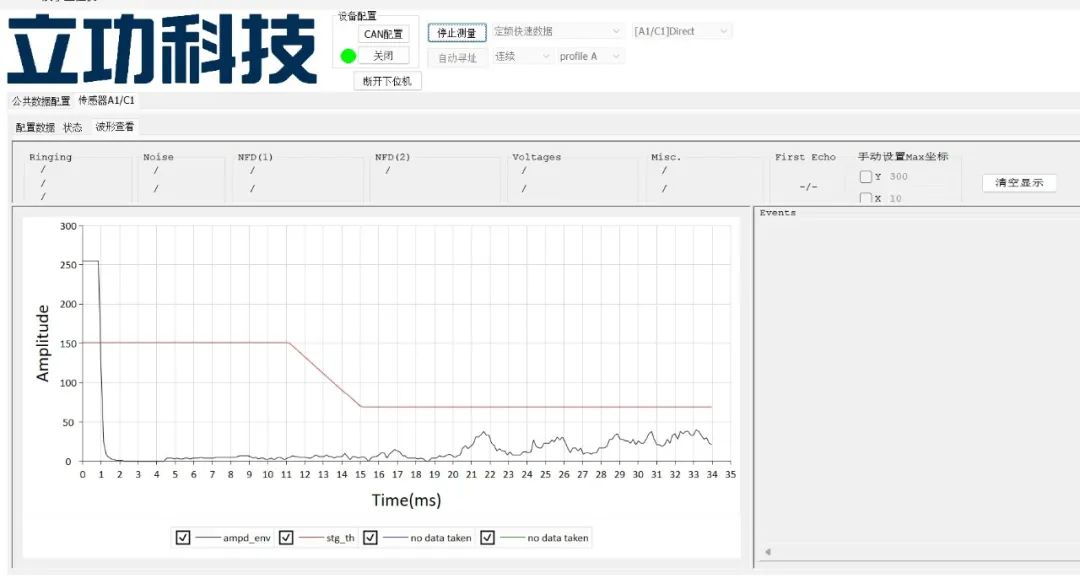
图7 实时测量波形显示
在AK2探头端的优势有
探头硬件低底噪,高灵敏度;
支持多段阈值比较;
支持多段STC设定;
支持不同车厂功能单独定制;
下图为AK2实测效果:
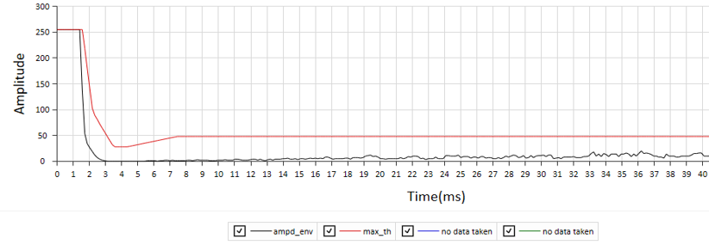
图8 无障碍物时测量波形显示
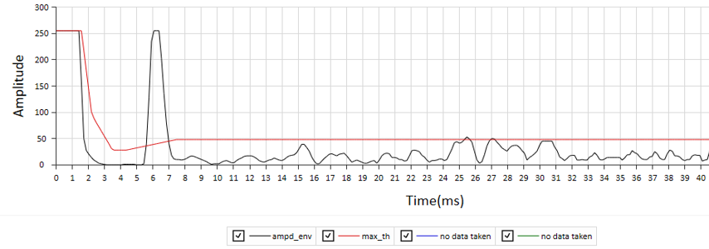
图9 一米障碍物时测量波形显示
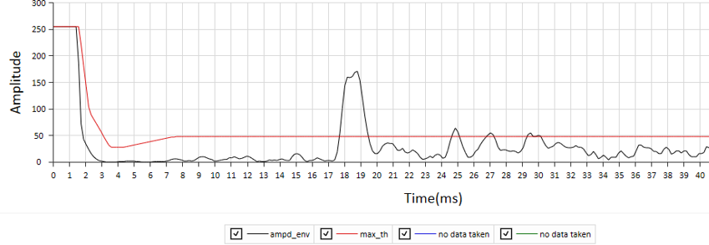
图10 三米障碍物时测量波形显示
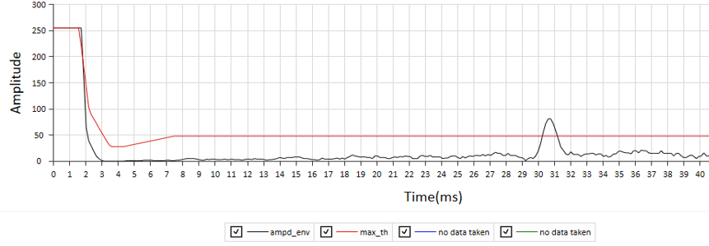
图11 五米障碍物时测量波形显示
-
简单认识第二代高通3D Sonic传感器2025-01-21 2132
-
E524.17型号的Elmos芯片如何改变AK2超声波雷达的工作效能?2024-12-25 3073
-
AK2超声波传感器驱动和信号处理:Elmos芯片篇2024-12-23 3907
-
AK2超声波雷达:自动驾驶低速巡航的精准感知来源2024-12-05 2546
-
一文读懂AK1和AK2超声波雷达的区别2024-07-16 5043
-
市场需求激增,车圈为什么越来越爱AK2车载超声波传感器?2024-05-16 1379
-
深圳传感器展 | 新一代AK2超声波雷达,引领智能泊车新时代!2023-04-07 3089
-
奥迪威:新一代AK2超声波雷达,引领智能泊车新时代!2023-04-03 4182
-
奥迪威AK2超声波雷达获评高工2022年度“智能驾驶(感知)好产品”2022-09-08 4436
-
求分享USB3.1第二代应用的ESD解决方案2022-01-14 2371
-
FLIR第二代热像仪ADK有哪些特点?2021-07-11 2408
-
高通发布第二代超声波屏下指纹识别器2021-01-12 1514
-
高通开始研究第二代超声波屏下指纹识别技术 或于今年下半年面世2019-03-25 1948
-
华为Mate 20 Pro将采用高通第二代超声波指纹技术2018-08-09 8092
全部0条评论

快来发表一下你的评论吧 !
