

深度解析机器人控制技术背后的机械原理
机器人
描述
很多司已经研制出了性能非常优越的机器人产品。
比如,谷歌的“大狗”、会后空翻的机器人和波士顿“小汪”。
这些机器人动作那么敏捷,被网友称赞“帅爆了!” 机器人控制技术很复杂,不过其中的机械原理其实相对比较简单,大部分都是一些连杆机构。 连杆,指的是定长线段与定长线段顶点重合所构成的结构。
1.平行四杆机构
一种结构简单,低成本,传输可靠性高的平行四杆机构,是一种铰链四杆机构,构件呈平行四边形,能稳定可靠地进行水平移送。
怎么最后快变成车轮子了!
2.切比雪夫连杆机构
如下运动简图,由静止节、原动节、从动节、中间节和延长中间节组成的四杆机构即为切比雪夫连杆机构,实现机器人腿部的抬腿、迈步、蹬地、前行的周期性动作。其余未标注名称的杆件与部分切比雪夫连杆组成平行四边形机构,用来保持机器人脚面与地面的平行。可以模拟平滑的行走轨迹,效率高。
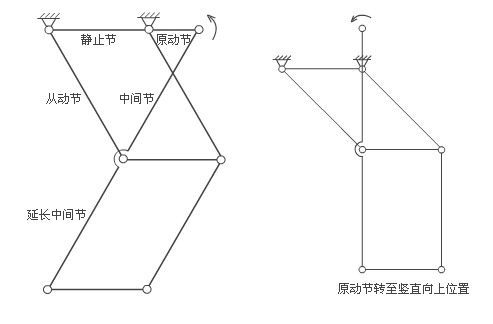
经常被用于模拟机器人的行走。

这步态够优美吧,迈着小碎步就出来了。
这个竟然也是切比雪夫连杆组成的,我怎么没看出来,什么,倒立着就出来了,倒立着好像也挺好看的啊。
3. 克兰连杆机构
单个克兰连杆是酱紫的。

你这步子迈得有点不美丽了啊,不过还是克兰连杆。

没看错吧,横着就出来了。看来以上都是四腿的。 感觉还是切比雪夫好看! 4. Jansen 连杆机构 是由Jansen发明的,用于模拟平稳行走,Jansen利用这种连杆制造了著名的海滩巨兽,这种连杆兼具美学价值和技术优势,通过简单的旋转输入就可模仿生物行走运动,这种连杆已经用于行走机器人和步态分析。可以制造巨大的运动机械,比如电动蜘蛛。
单个Jansen连杆机构是酱紫的。
太狠了,12只脚!头有点晕,我想静静!
5.波塞利连杆机构
波塞利连杆是第一个真正把旋转运动转化为绝对直线运动的平面连杆机构,事实上,运用初中数学就能证明它的轨迹是直线。
6.瓦特连杆
瓦特连杆是用来作进直线运动的,一般见于车底。 瓦特连杆是由瓦特发明的,没错就是那个特别流弊改良了蒸汽机的瓦特。在瓦特连杆中,移动的中点自由度被限制,只得做近似直线运动。最早是用在瓦特蒸汽轮机上的,后来也用做汽车的悬架结构中了。
7.其他模仿行走的机构
这个有点复杂啊!
这个大长腿有点不一样啊,输入竟然不是旋转运动,直接用直线运动控制了。
编辑:黄飞
-
什么是工业机器人2015-01-19 6815
-
工业机器人经典好书籍——《工业机器人》2015-02-03 32444
-
如何系统性地学习工业机器人技术?2016-03-06 3475
-
浅析机器人技术及其应用2016-09-22 8692
-
机器人的主要技术参数2017-08-15 7523
-
先进机器人控制2017-09-19 4585
-
基于深度学习技术的智能机器人2018-05-31 6425
-
工业机器人的技术原理2018-11-23 5070
-
机器人基础书籍2019-05-22 3649
-
ABB机器人维修保养指南2020-08-19 6018
-
机器人运动控制技术2021-07-28 2339
-
机器人系统与控制需求简介2021-09-08 2341
-
机器人是如何实现运作的呢2021-09-17 1568
-
PDF——工业机器人技术及应用2022-10-16 27494
-
人形机器人爆发背后,一个被忽视的核心技术:机器人运动学控制2026-03-10 1418
全部0条评论

快来发表一下你的评论吧 !
