

EPR6-S工业机器人通过EtherCAT转profinet网关接入西门子系统
电子说
描述
EPR6-S工业机器人专用六轴伺服驱动器通过EtherCAT转profinet网关与西门子PLC1200连接
本案例EtherCAT转profinet(Profinet转EtherCAT)网关连接EPR6-S工业机器人专用六轴伺服驱动器用于汽车安装现场的配置案例。用到的设备为西门子1200PLC一台,EtherCAT转profinet(Profinet转EtherCAT)网关一个,EPR6-S工业机器人专用六轴伺服驱动器一台。


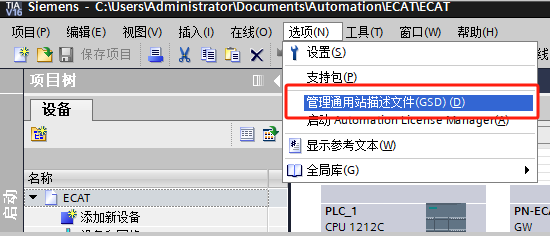
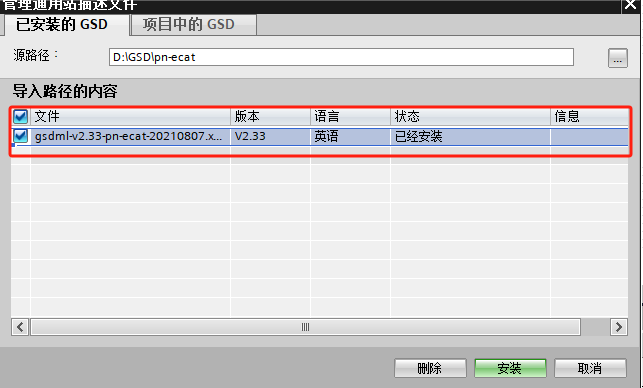
首先我们要在西门子PLC博图中进行组态,点击管理通用站描述文件,再点击右侧“...”从查找GSD所在文件,勾选当前GSD文件安装至成功。
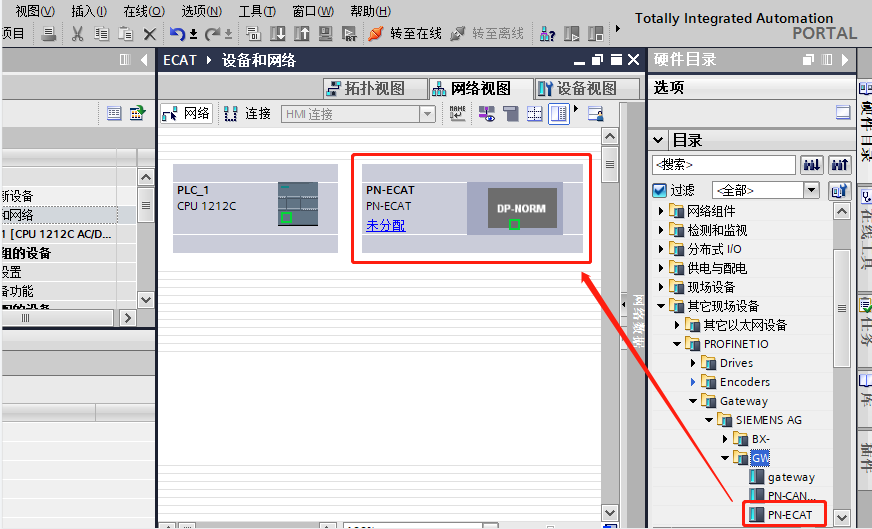
从右侧硬件目录-其他以太网设备--PROFINET IO--Gateway--GW--PN-ECAT找到网关模块进行组态。
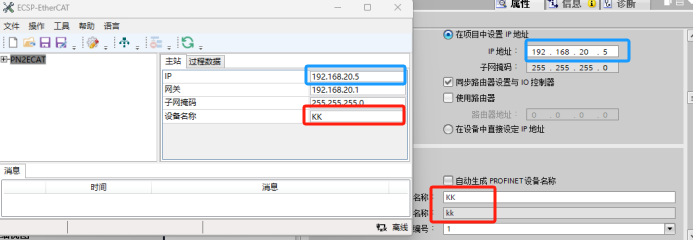
双击EtherCAT转profinet(Profinet转EtherCAT)网关属性设置EtherCAT转profinet(Profinet转EtherCAT)网关的IP地址和设备名称,设置EtherCAT转profinet(Profinet转EtherCAT)网关设备名称要把自动生成取消勾选,重新输入新的名称,如果输入的名称包含/*_等特殊符号,配置软件的名称以转换的名称为准。
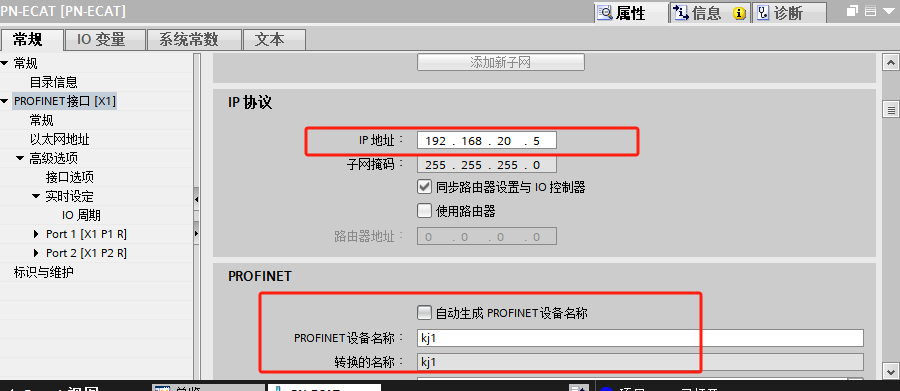
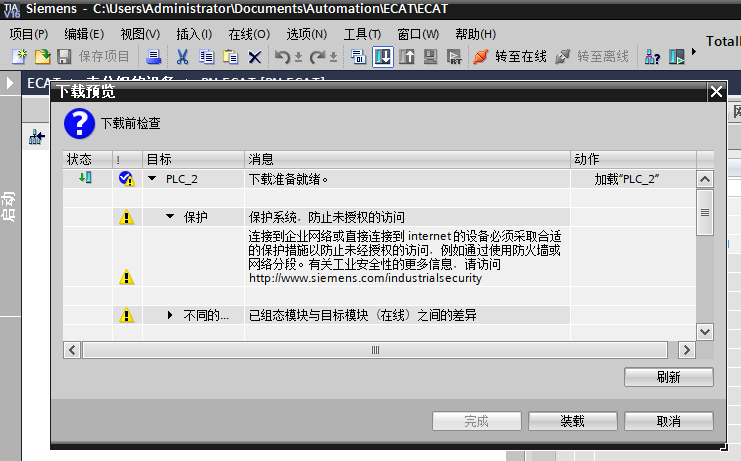
配置好IP地址和设备名称后再添加EtherCAT转profinet(Profinet转EtherCAT)网关的输入输出字节数长度,下载组态到PLC。
下面是使用配置对PN-ECAT网关进行参数配置和下载,打开EtherCAT转profinet(Profinet转EtherCAT)网关配置软件进行ECAT设置。
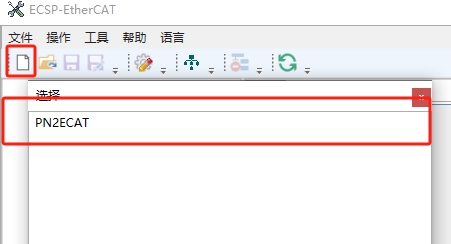
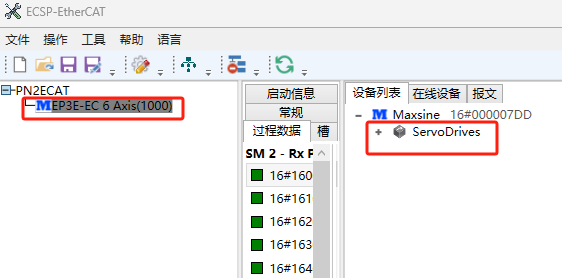
新建项目,选择PN2ECAT,配置软件的ip地址和设备名称要和博图一致。
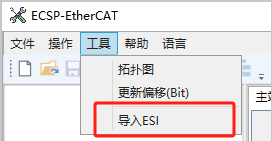
导入从站设备ESI后,在设备列表中下方搜索查找并选定所需设备。
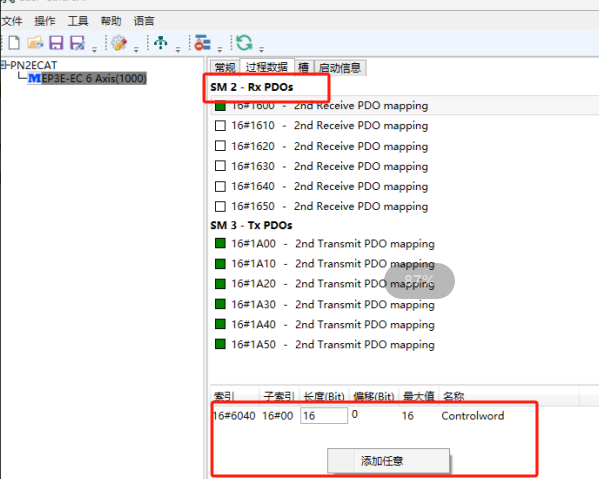
对EPR6-S工业机器人专用六轴伺服驱动器进行参数配置,无论在RX PDOS还是TX PDOS都是可以添加任意所需参数。。
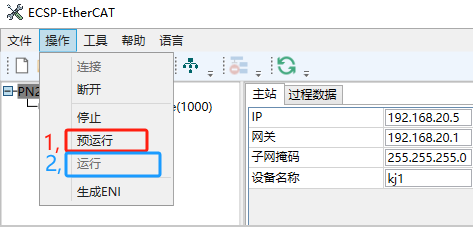
配置完成后进行连接步骤。
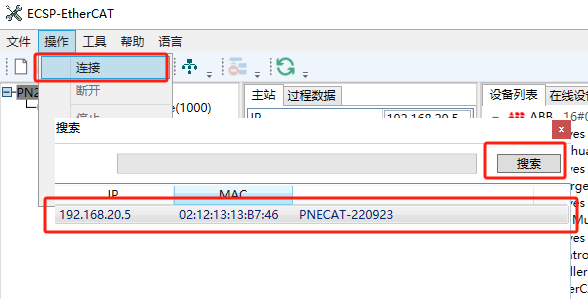
先点击预运行再点击运行。重新给配置软件的ip地址和设备名称要和博图一致,EtherCAT转profinet(Profinet转EtherCAT)网关上电即可。
组态和配置软件都配置完并下载后,配置软件的ip地址和设备名称要和博图一致网关灯正常显示为直接对对应的I、Q地址读写即可。

以上是EPR6-S工业机器人专用六轴伺服驱动器通过EtherCAT转profinet(Profinet转EtherCAT)网关实现了智能PLC伺服器之间的PROFINET通讯。通过该配置软件的ip地址和设备名称要和博图一致,智能PLC能够与工业机器人专用六轴伺服驱动器进行快速、稳定的通讯,实现数据的传输和控制。
-
工业机器人如何通过ModbusTCP转Profinet实现与西门子PLC通讯?2026-06-15 739
-
西门子PLC通过稳联技术EtherCAT转Profinet网关连接baumuller伺服器的配置案例2025-08-14 1117
-
开疆智能ModbusTCP转Profient网关连接西门子PLC与川崎机器人配置案例2025-07-26 2121
-
EPR6-S工业机器人通过EtherCAT转profinet网关接入西门子系统2023-10-24 1960
-
Profinet转EtherCAT主站网关用西门子1200控制EtherCAT伺服。2023-09-18 3534
-
EtherCAT转profinet网关连接kollmorgen驱动器将其接入西门子1200PLC2023-08-10 685
-
RS232转Profinet网关连接ESD设备接入西门子Profinet网络2023-08-09 2133
-
profinet转ethernet网关连接发那科机器人配置案例2023-08-03 3794
-
Profinet转Modbus TCP网关连接搬运机器人配置案例2023-06-07 1499
-
通过EtherCAT转Profinet网关与西门子PLC1200通信2023-05-31 3653
-
应用案例丨伺服驱动器连接Ethercat转profinet网关2023-05-18 2289
-
Profinet转EtherCat网关连接西门子1200及ABB伺服的配置案例2022-07-18 5853
全部0条评论

快来发表一下你的评论吧 !
