

新型三相异步电机直接转矩控制方法
工业控制
描述
导读:传统的直接转矩控制方法6扇区电压矢量选择会导致磁链控制不对称、转矩脉动大等问题,本期介绍一种把扇区细分为12扇区的新型三相异步电机直接转矩控制方法,仿真结果证明磁链轨迹、转速及转矩脉动明显变小,异步电机三相定子电流波形更加圆滑,更加接近于正弦波形。
一、传统直接转矩控制(两电平6扇区)
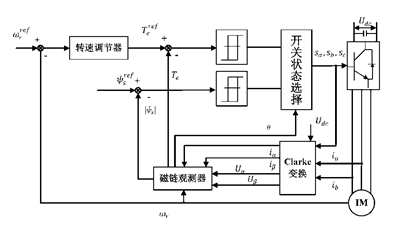
图1-1 异步电机直接转矩控制框图
在电动机实际运行中,保持定子磁链幅值为额定值,以便充分利用电动机铁芯;转子磁链幅值由负载决定。通过控制定子磁链与转子磁链之间的夹角即转矩角可以控制电动机的转矩。在直接转矩控制中,其基本控制方法就是通过选择电压空间矢量来控制定子磁链的旋转速度,控制定子磁链走走停停,以改变定子磁链的平均旋转速度的大小,从而改变转矩角的大小,以达到控制电动机转矩的目的。
二、改进型直接转矩控制
传统的直接转矩控制方法6扇区电压矢量选择会导致磁链控制不对称、转矩脉动大等问题,该文提出了一种把扇区细分为12扇区的新型三相异步电机直接转矩控制方法,矢量选择表见表1。
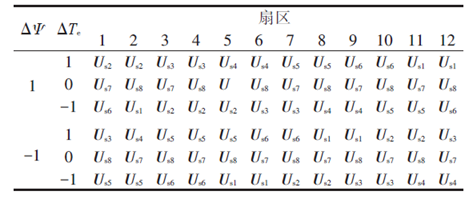
扇区细分的做法是每 30 ° 一个扇区,总共 12扇区。第1扇区磁链角为-15 °~15 °,第2扇区为15 °~45 ° ,接下来每扇区依次增加 30° 。这样的划分法有效地避免了某些电压矢量处于扇区分界线处而导致的控制失效。但是,为了减小启动过程电流过大和改善磁链轨迹,在启动阶段对磁链和电流进行限制。当电机刚开始启动时,为了减小启动电流,对电流进行限制,并且使得初始给定转速为零,并利用电压矢量 Us1和Us7不断增加磁链幅值直到预期幅值。之后,正常按直接转矩控制运行。一旦电流达到电流幅值上限,就选择 Us7,在规定幅值以下,采用矢量表选出电压矢量。
三、仿真模型搭建与波形分析
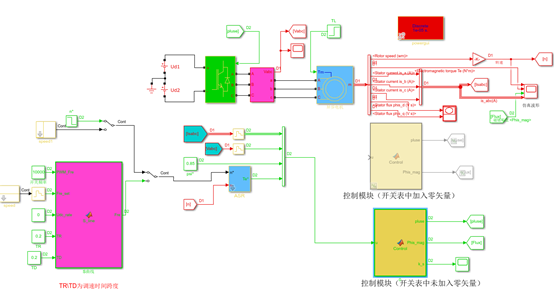
图3
-1 异步电机直接转矩控制系统仿真(两电平12扇区)
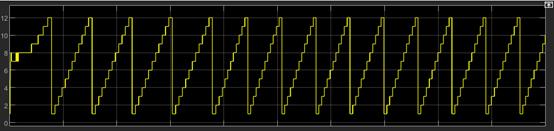
图3-2 扇区划分
从图(3-2)可知,仿真中将扇区细分为12扇区。
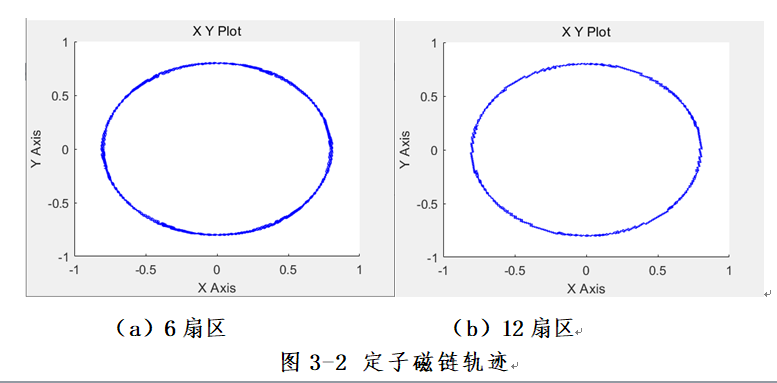
(a)6扇区
(b)12扇区
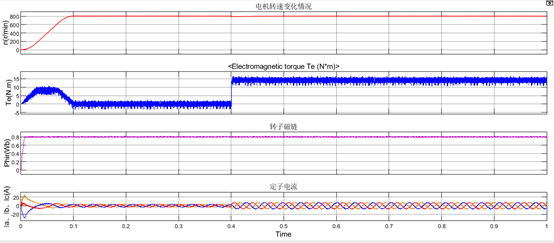
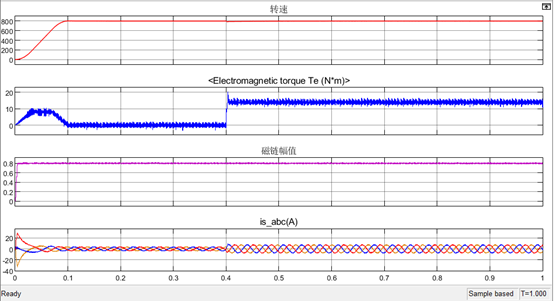
图3-3 异步电机直接转矩控制系统仿真波形变化情况(800r/min)
从图(3-2)和(3-3)可知,基于12扇区的DTC的定子磁链和转矩的脉动相对减小。
审核编辑:汤梓红
-
三相异步电机矢量控制的研究2025-06-16 234
-
三相异步电机机械特性测试系统研究2025-06-13 529
-
三相异步电机的控制电路2023-11-21 770
-
三相异步电机运行原理2023-03-29 1239
-
普通的三相异步电机输入频率和转速是成正比么?2023-03-24 2483
-
三相异步电机公式相关资料推荐2021-09-06 1628
-
三相异步电机的转子旋转原理2021-02-14 15100
-
三相异步电机驱动2015-12-30 6832
-
三相异步电机位置控制2015-12-08 5796
-
三相异步电机的可逆控制12012-09-21 2586
-
三相异步电机控制电路2011-07-14 5378
-
三相异步电机设计2006-03-28 1773
全部0条评论

快来发表一下你的评论吧 !
