

工业机器人ABB编程常用指令
电子说
描述
在之前的文章中,相信你已经对ABB机器人的MOVE指令以及常用专属名词有一定的了解了,而从这篇文章开始,继续学习新的 编程常用指令 。
1.Procall调用程序。
在ABB的编程中,一个程序可以被多次调用,而在示教器中,可以通过Procall调用其他的程序。
用法如下:
在主程序中,选中proccall。
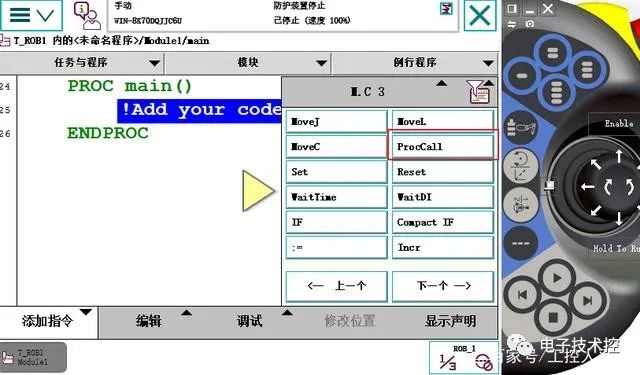
点击PROCCALL之后,会出现如下弹窗:
“弹窗中显示的都是可以被调用的程序,如图所示,可调用的程序共2个:main主程序以及一个routine子程序。值得注意的是, 在主程序中,也是可以调用主程序的 ”
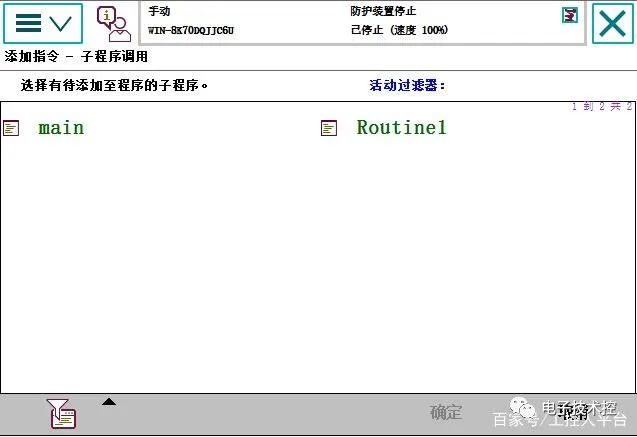
根据需要来选择程序即可,在这次的讲解中,以调用routine1为例:
选中routine1后,点击确定即可。
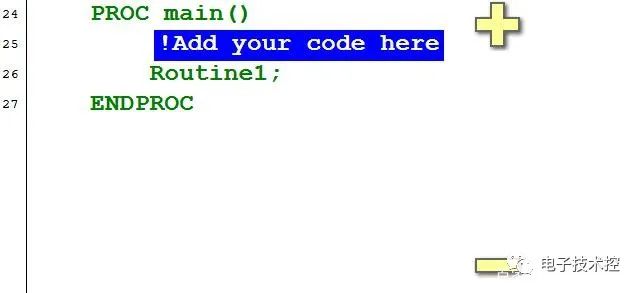
确定完成之后,就可以在示教器的主程序中看到刚刚调用的子程序routine1了(如下图所示)
值得注意的是,在示教器中编程调用程序的话,是可以通过proccall,而在robstudio中编程,则可以直接通过复制程序的名称,然后粘贴到main主程序中。
当然了,proccall调用子程序的数量也并非是无限的:
“程序可相互调用,并反过来调用另一个程序。程序亦可自我调用,即递归调用。允许的程序等级取决于参数数量。通常允许10级以上”
2.stop指令。
熟悉英语的人应该都清除,stop就是停止的含义,而在ABB编程中,stop指令同样也是如此:
“在ABB编程中, stop指令就是停止程序的运行 , 相当于示教器中的停止键 ”
通常,也是在程序段的末尾使用stop指令,在执行完该指令后,机器人的程序就会处于停止状态,直到再次启动程序的运行。
好了,这就是本篇文章所介绍的机器人常用指令中的2个:proccall以及stop,在下一篇文章中,我会继续其他的ABB常用的指令。
审核编辑:汤梓红
-
工业机器人常用的编程方式2024-09-04 4355
-
abb机器人movej和movel的区别2024-06-17 7370
-
ABB工业机器人运动指令有哪几个2024-06-16 5916
-
工业机器人ABB编程常用指令2023-10-19 3819
-
工业机器人仿真与编程2021-09-07 2426
-
ABB机器人实训平台实验2021-07-01 2783
-
ABB机器人的常用指令详细讲解2020-04-24 2216
-
零基础玩转工业机器人2018-10-29 5030
-
对《工业机器人编程指令详解》的详细介绍2017-12-21 20546
-
ABB焊接机器人问题2017-10-16 5658
-
机器人指令精选版2016-01-19 883
-
ABB机器人程序指令汇总2015-12-23 1861
全部0条评论

快来发表一下你的评论吧 !
