

浅谈KUKA机器人的X11现场布线
机器人
描述
IO信号与机器人安全信号接入方式的区别
库卡机器人的安全信号与IO模块是相互独立的,即安全信号不是通过IO信号接入到机器人里。安全信号主要是指:急停、安全门等属于机器人安全控制类的信号。
安全信号接入方式有3种,其中2种是通过安全软件协议去实现的,下面就接入方式进行介绍:
1)第一种方式:Profisafe,以软件包的形式安装机器人KSS系统里,安全信号将通过预先定义的通信协议以Profinet总线通讯的方式传递给机器人。因此,这种方式要求客户必须配置Profinet总线通信。
2)第二种方式:CIP-Safety,以软件包的形式安装机器人KSS系统里,安全信号将通过预先定义的通信协议以EtherNet IP总线通讯的方式传递给机器人。因此,这种方式要求客户必须配置EtherNet IP总线通信。
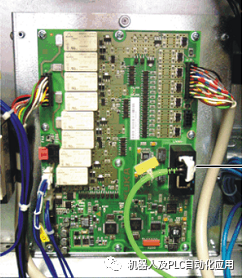
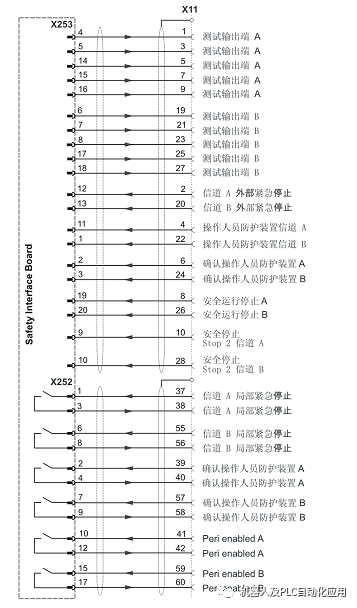
3)第三种方式:X11接头+SIB(Safety Interface Board,用于连接安全信号的接口板),安全信号通过线缆的方式接入X11接头里。
1:第一种方式和第二种方式一般在汽车厂运用比较多。第三种方式在其他通用领域用的多,比如搬运、码垛、弧焊等。
2:库卡机器人的安全信号均采用双通道方式,确保系统的安全。
安全信号——X11接头接线说明
由于Profisafe、CIP-Safety两种方式是通过软件通信协议配置安全信号的,在配套PLC软件编程中实现。因此,在这里只介绍安全信号通过X11接头的接线图。
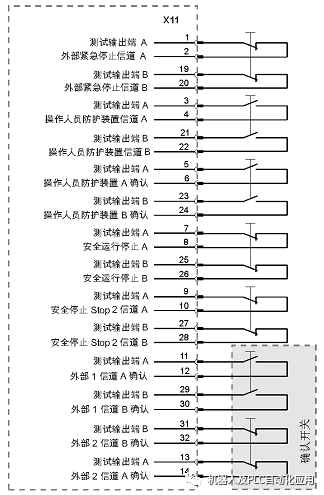
X11的接线图根据控制柜型号不同,接线方式也不一样。 (1)KR C4 stand & KR C4 Midsize & KR C4 Extend 控制柜:急停、安全门、安全光栅信号说明:建议接入相应的安全装置里, 如果确定不需要接入,将相应的通道短接即可,如下所示:
X11接头接线方式: 急停 A组:1-2 B组:19-20 安全门 A组:3-4 B组:21-22 安全确认 A组:5-6 B组:23-24 安全停止 A组:7-8 B组:25-26 用不到的接头,按照以上短接: 通道A组 通道B组 9-10短接 27-28短接 11-12短接 29-30短接 13-14短接 31-32短接
备注:库卡机器人提供安全接口,其余的设备附件由用户提供 .
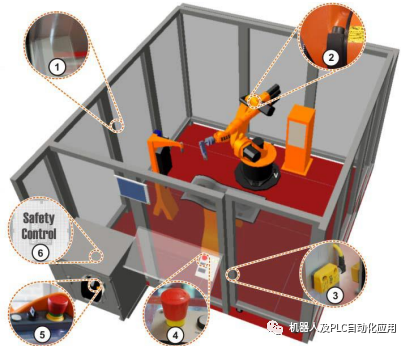
1 防护栅 2 轴 1、2 和 3 的机械终端止挡或者轴范围限制装置 3 防护门及具有关闭功能监控的门触点 4 紧急停止按钮(外部) 5 紧急停止按钮、确认键、调用连接管理器的钥匙开关 6 内置的 (V)KR C4 安全控制器
编辑:黄飞
-
KUKA机器人编程说明(英文)2025-03-07 535
-
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?2023-10-21 3890
-
KUKA机器人固定焊钳的铣削控制2023-04-13 1825
-
KUKA库卡机器人MGV电源模块维修PH1013-28402022-01-12 1675
-
KUKA机器人伺服驱动模块维修2021-09-17 1884
-
库卡机器人MGV电源模块维修2021-09-08 1880
-
工业机器人组成结构相关资料分享2021-07-05 2740
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 8019
-
KUKA库卡机器人伺服驱动器相关型号举例2020-09-08 10910
-
KUKA机器人问题解答2019-07-15 2625
-
求KUKA机器人控制柜三维模型2016-04-18 6462
-
KUKA机器人TCP(工具中心点)设定2015-12-23 2291
-
华南机器人应用培训中心工业机器人培训班招生2015-09-02 14445
-
KUKA重型机器人2015-02-03 8320
全部0条评论

快来发表一下你的评论吧 !
