

使用FPGA做一个ODrive
描述
“软核”硬做-ODrive(FPGA版本)
之前稚晖君做了一个《机器人的心脏--超迷你FOC矢量控制驱动器》。
核心CPU是XX32FXXX,在工业控制领域其实FPGA占比也很大,所以能不能用FPGA做一个ODrive呢?答案是肯定的。
介绍
该项目旨在以低廉的价格准确地驱动无刷电机。目的是使在高性能机器人项目中使用廉价的无刷电机成为可能。像这样:
主要规格
控制两个电机。
提供 24V 和 48V 版本。
每个电机的峰值电流 120A。
持续电流取决于散热情况。
用于任意精确运动的编码器反馈。
支持两种制动模式:
制动电阻。
再生制动。
可选使用电池,意味着只需适度的电源即可实现非常高的峰值功率输出。
开源:硬件、软件
控制模式
Goto(带轨迹规划的位置控制)
位置命令
速度指令
扭矩指令
接口
USB——自定义协议,开源
PC、树莓派等
步进/方向——现有的运动控制器
UART—— Arduino(带库)、mBed等。
伺服 PWM/PPM——RC 接收器、Arduino 等。
CAN -- 基本自定义协议
一些通用数字和模拟引脚
硬件介绍
原理图和PCB使用AD绘制
原理图TOP:
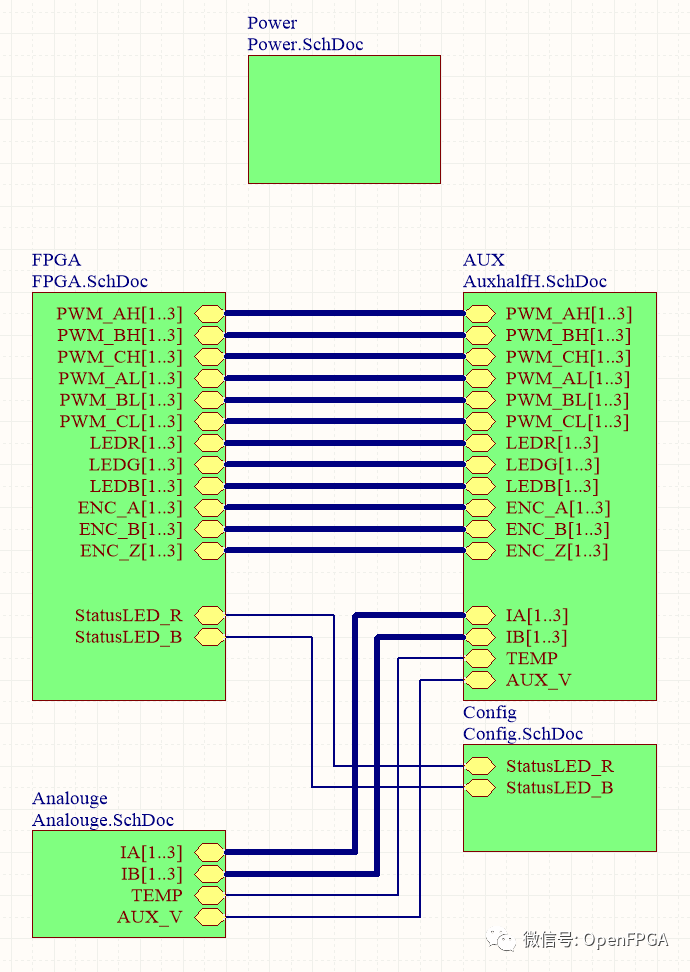
核心器件:
FPGA:10M08SAE144
电源:AP1117E33G-13、LM3490IM5-12/NOPB 这是给FPGA供电的,不需要太大电流
MOS:NTMFS4937NT1G
PCB欣赏:
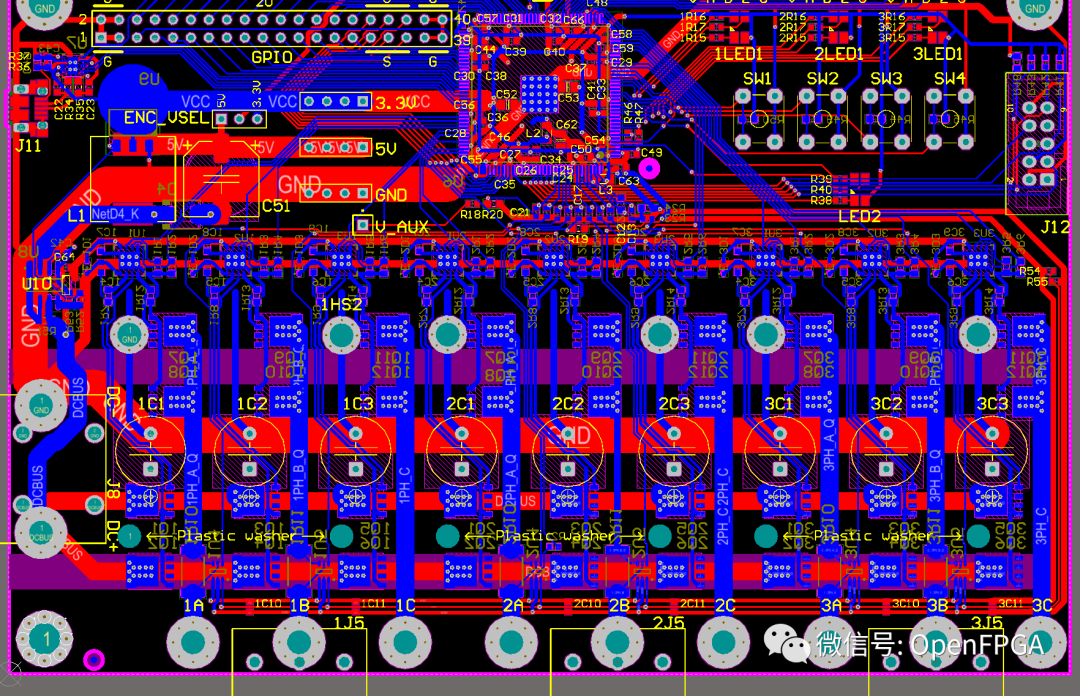
版本勘误表:
编码器(M0、M1)的丝印标签是相反的。
在设计后置放大器滤波器时没有考虑电流放大器的输出阻抗。因此,响应比设计慢约 5 倍。因此,最大允许调制指数约为 50%。
固件
EDA工具是QUARTUS_VERSION 13.1 ,整体逻辑不是很复杂。
审核编辑:汤梓红
-
求助 odrive for stm32控制讲解2024-04-25 19112
-
在FPGA里面做一个NIOS核2009-09-16 3496
-
自己做一个fpga开发板2012-09-04 3280
-
做一个FPGA控制MOSFET的开关电源,怎样挑选FPGA芯片2019-03-07 2930
-
Zynq 7020 FPGA做一个RTL引脚规划2020-04-10 3308
-
怎么判断ODrive是否需要功率耗散电阻?2021-07-13 5597
-
Odrive开发笔记 精选资料推荐2021-09-02 1616
-
如何ODrive去驱动无刷电机2021-09-22 4281
-
你应该为你的FPGA做一个新选择2018-06-11 2234
-
如何用废弃的电脑风扇做一个磁搅?2018-08-07 7552
-
如何用所学的鸿蒙知识做一个小应用2021-10-19 2590
-
“软核”硬做-ODrive(FPGA版本)2022-04-25 6917
-
用LDR做一个自动夜灯2022-10-28 611
-
做一个可以跟随光线的机器人2022-12-29 610
-
教你做一个电子打火机2023-11-15 4951
全部0条评论

快来发表一下你的评论吧 !
