

全国产EtherCAT运动控制边缘控制器(五):IO配置与回零运动的Python+Qt开发
描述
今天,正运动小助手给大家分享一下全国产EtherCAT运动控制边缘控制器ZMC432H如何使用Python+QT实现单轴回零运动控制开发。
01
功能简介
全国产EtherCAT运动控制边缘控制器ZMC432H是正运动的一款软硬件全国产自主可控,运动控制接口兼容EtherCAT总线和脉冲型的独立式运动控制器,最多支持32轴运动控制,同时支持正运动远程HMI功能,能提供网络组态显示,可实时监控和调整参数配置。
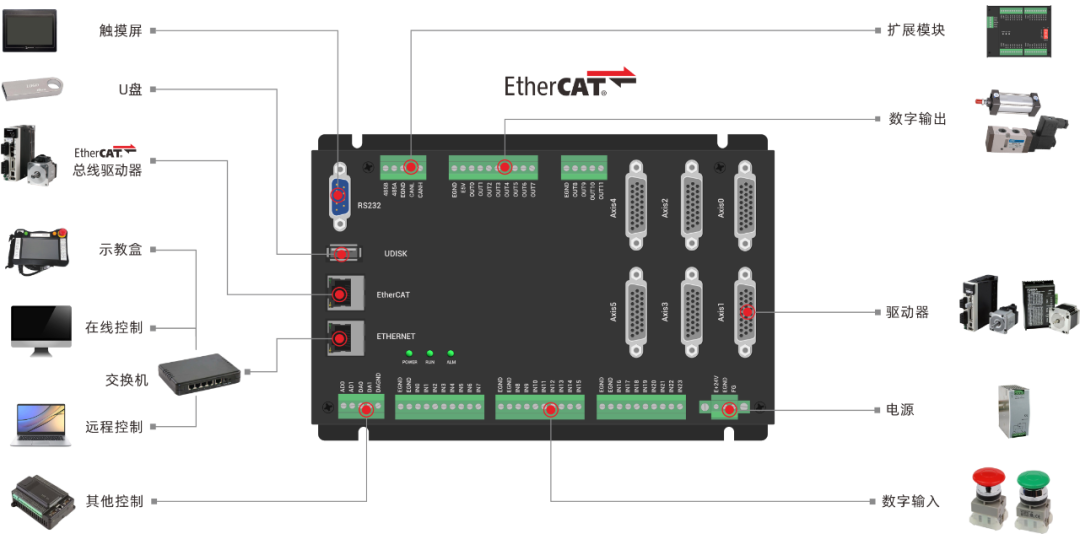
ZMC432H内置了Linux系统,可以使用本地的LOCAL接口进行连接,可以做到更快速的指令交互,单条指令与多条指令一次性交互时间为40us左右。
 ZMC432H视频介绍:
ZMC432H视频介绍:
02
Python+QT进行运动控制开发
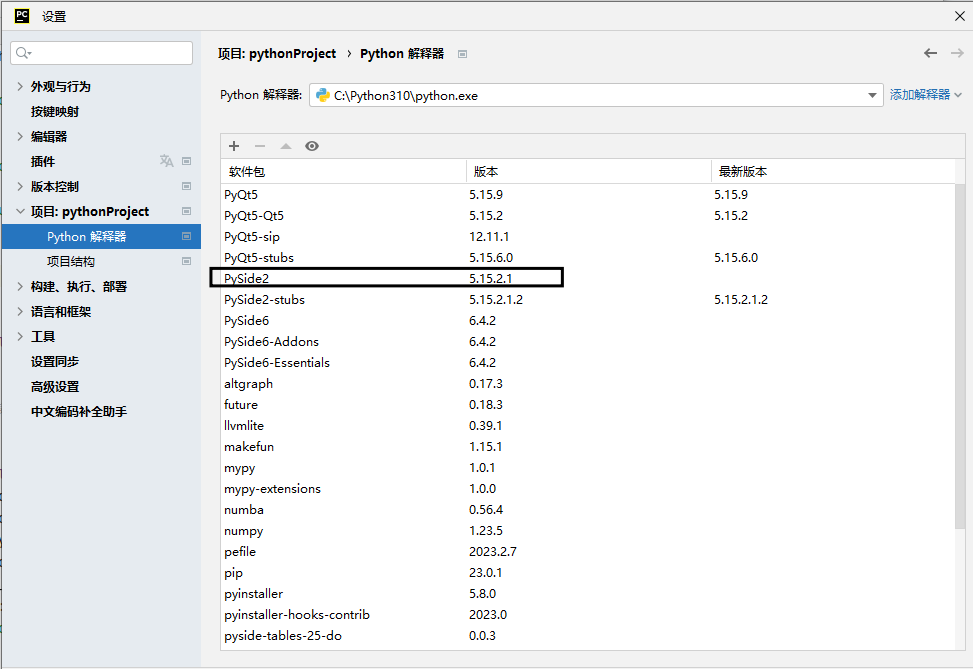
一.配置好python+Qt开发环境,以及安装好所需工具1、下载python解释器。2、安装pyside2或者pyside6根据python解释器的版本来选择,高版本的解释器使用pyside6。安装pyside2有以下两种方式:
方式一:使用win+r打开运行界面,然后输入cmd(在安装python解释器的时候要根据安装向导配置好环境变量,否则后面的指令不会执行成功),pip install pyside2 -i https://pypi.douban.com/simple/;方式二:在pycharm中安装。
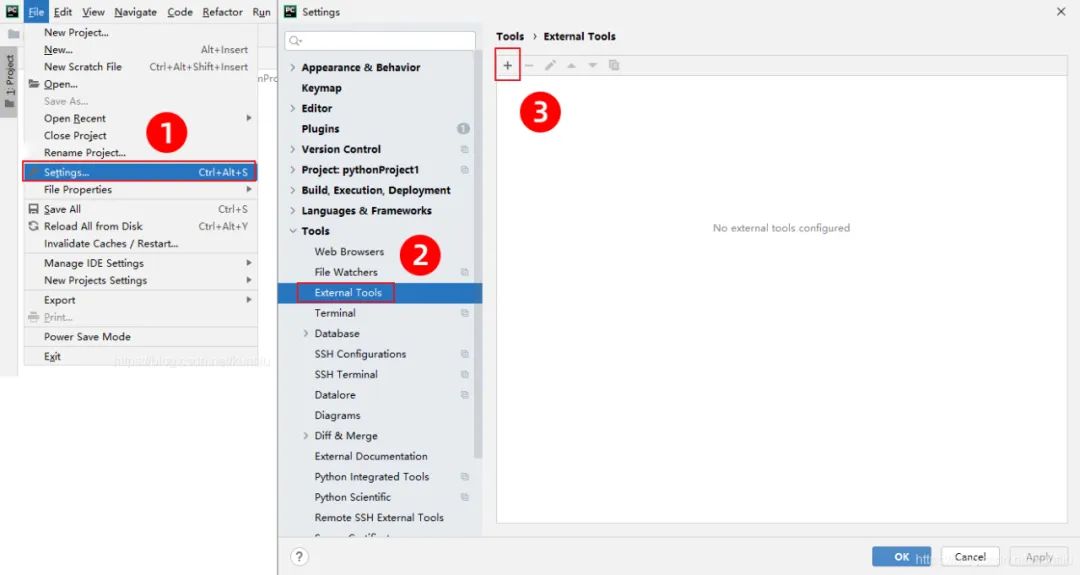
3、安装好PyCharm Community Edition,在如下界面点击+号,安装所需的工具,如pyside2。
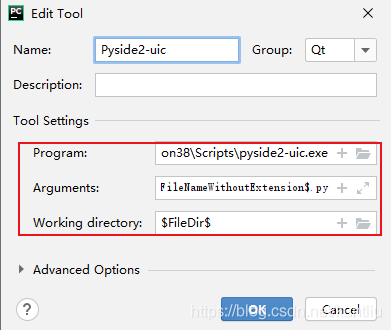
(1)按照如图步骤打开Tool的编辑框。
a.Program填写:Python安装目录 Scriptspyside2-uic.exe;
b.Arguments填写:$FileName$ -o $FileNameWithoutExtension$.py;
c.Working directory填写:$FileDir$。
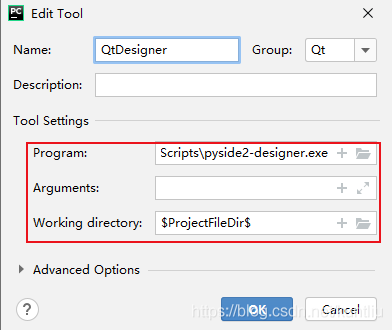
 (3)自定义QtDesigner:
(3)自定义QtDesigner:
a.Program填写:Python安装目录 Scriptspyside2-designer.exe;
b.Working directory填写:$ProjectFileDir$。
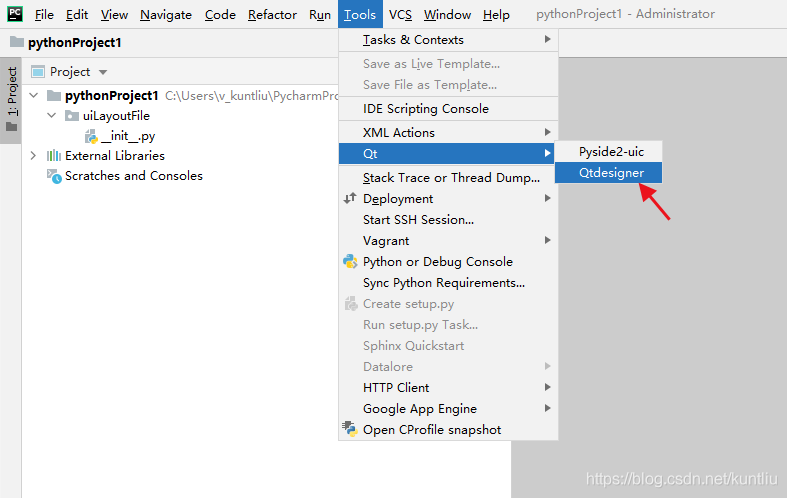
 将自定义工具配置好之后就可以直接在PyCharm的菜单中直接使用了。
将自定义工具配置好之后就可以直接在PyCharm的菜单中直接使用了。
1、点击Tools → Qt → Qtdesigner即可进入UI的设计界面。
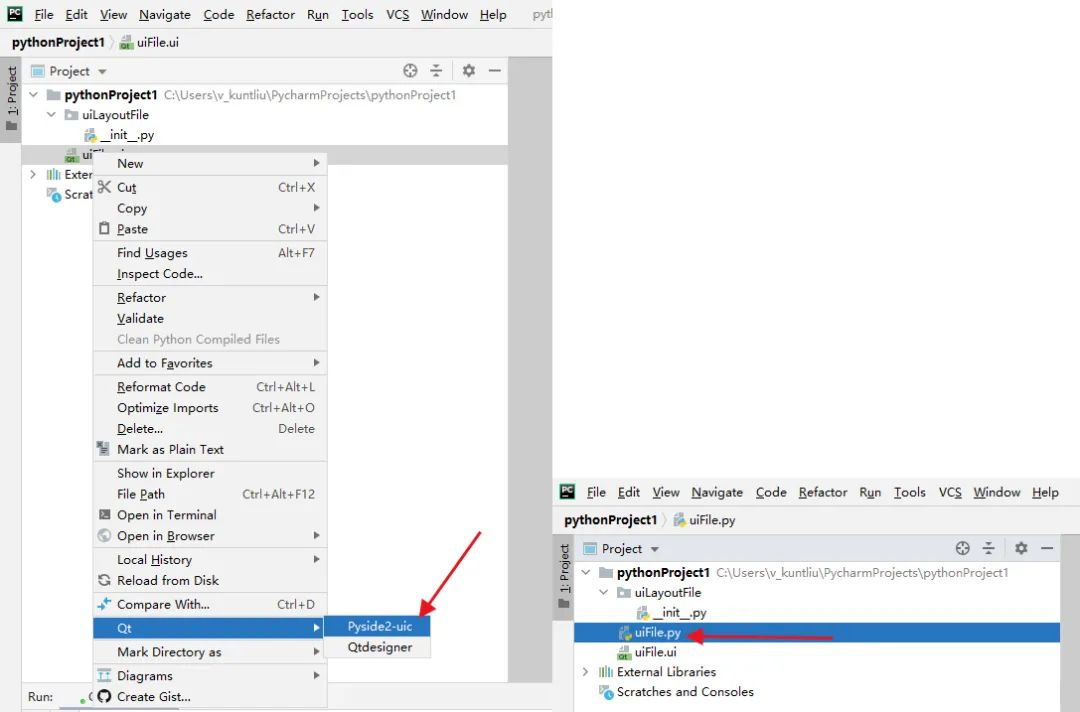
 2、右键ui文件,点击Qt → Pyside2-uic即可生成ui文件的py文件。
2、右键ui文件,点击Qt → Pyside2-uic即可生成ui文件的py文件。
二.新建Python项目并添加函数库
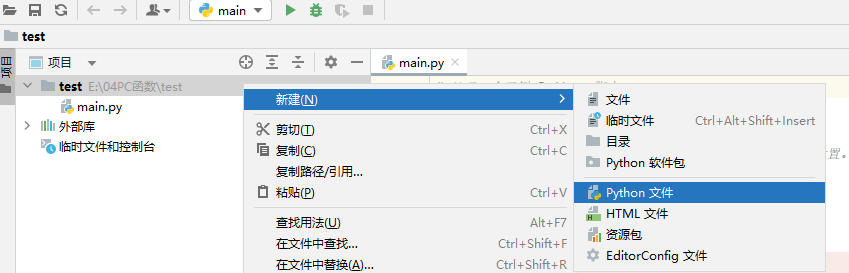
1、使用PyCharm Community Edition 2022打开一个新建的文件夹或者在进入PyCharm Community Edition 2022之后新建一个目录,并在目录中添加Python文件。
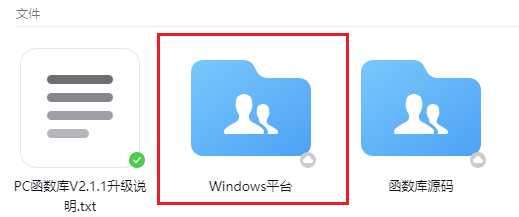
A.进入厂商提供的光盘资料找到“04.PC函数”文件夹,并点击进入。


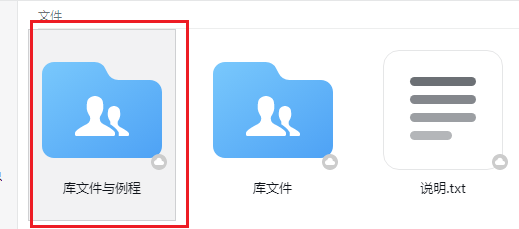
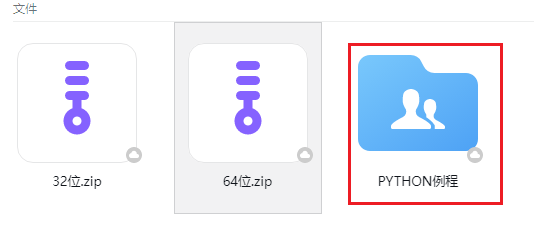
D.选择“库文件与例程”文件夹。
三、查看PC函数手册,熟悉相关函数接口。
1、PC函数手册也在光盘资料里面,具体路径如下:“光盘资料4.PC函数MotionPC函数库编程手册及其例程源码MotionPC函数库编程手册 V2.1.1.pdf”。

2、链接控制器,获取链接句柄。
(1)ZAux_OpenEth()接口说明:
|
指令7 |
ZAux_OpenEth |
|
指令原型 |
int32 __stdcall ZAux_OpenEth(char *ipaddr, ZMC_HANDLE * phandle) |
|
指令说明 |
以太网链接控制器。 |
|
输入参数 |
输入参数1个,详细见下面说明。 |
|
ipaddr |
链接的IP地址。 |
|
输出参数 |
输出参数1个,详细见下面说明。 |
|
Phandle |
返回的链接句柄。 |
|
返回值 |
详细见错误码说明。 |
(2)配置IO信号点对应函数接口说明:
|
指令 |
说明 |
|
ZAux_Direct_SetDatumIn |
设置轴原点信号 |
|
ZAux_Direct_SetFwdIn |
设置轴正向限位信号 |
|
ZAux_Direct_SetRevIn |
设置轴负向限位信号 |
|
ZAux_Direct_SetAlmIn |
设置轴伺服告警信号 |
|
ZAux_Direct_SetInvertIn |
设置输入口信号反转状态 |
|
ZAux_Direct_GetDatumIn |
读取原点信号 |
|
ZAux_Direct_GetFwdIn |
读取轴正向限位信号 |
|
ZAux_Direct_GetRevIn |
读取负向限位信号 |
|
ZAux_Direct_GetAlmIn |
读取伺服告警信号 |
(3)以下为回零运动调用接口,以及对回零模式的详细说明:加10表示碰到限位后反找, 不会碰到限位停止,例如13=模式3+限位反找10,用于原点在正中间的情况。
|
指令78 |
ZAux_Direct_Single_Datum |
|
指令原型 |
int32 __stdcall ZAux_Direct_Single_Datum(ZMC_HANDLE handle, int iaxis, int imode) |
|
指令说明 |
单轴回零运动。 |
|
输入参数 |
共有3个输入参数,见下方说明。 |
|
handle |
链接标识。 |
|
iaxis |
轴号。 |
|
imode |
模式 0 清除所有轴的错误状态。 1 轴以CREEP速度正向运行直到Z信号出DPOS值重置为0同时纠正MPOS。 2 轴以CREEP速度反向运行直到Z信号出现。DPOS值重置为0同时纠正MPOS。 3 轴以SPEED速度正向运行,直到碰到原点开关。然后轴以CREEP速度反向运动直到离开原点开关。DPOS值重置为0同时纠正MPOS 4 轴以SPEED速度反向运行,直到碰到原点开关。然后轴以CREEP速度正向运动直到离开原点开关。DPOS值重置为0同时纠正MPOS。 5 轴以SPEED速度正向运行,直到碰到原点开关。然后轴以CREEP速度反向运动直到离开原点开关,然后再继续以爬行速度反转直到碰到Z信号。DPOS值重置为0同时纠正MPOS 6 轴以SPEED速度反向运行,直到碰到原点开关。然后轴以CREEP速度正向运动直到离开原点开关,然后再继续以爬行速度正转直到碰到Z信号。DPOS值重置为0同时纠正MPOS。 |
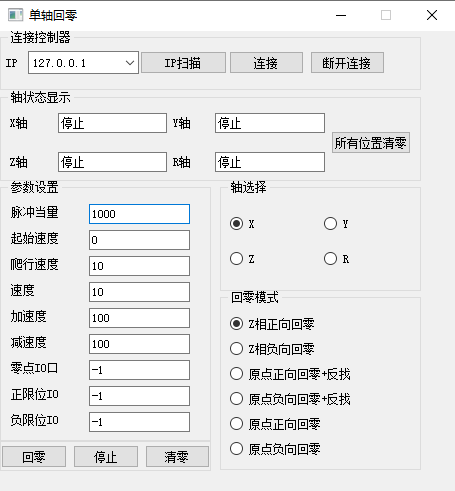
四.Python+Qt开发控制器单轴回零例程。
1、例程界面如下。
2、程序示例如下。
(1)Python中加载qt的UI文件;
from PySide2.QtWidgets import QMessageBox
from PySide2.QtCore import QFile, QTimer
from PySide2.QtUiTools import QUiLoader
q_state_file = QFile("mainweiget.ui")
q_state_file.open(QFile.ReadOnly)
self.ui = QUiLoader().load(q_state_file)
q_state_file.close()
注:此时self.ui表示了qt中的ui。
(2)链接按钮的事件处理函数中调用链接控制器的接口函数ZAux_OpenEth(),与控制器进行链接,链接成功后启动定时器1监控控制器状态。
def on_btn_open_clicked(self):
strtemp = self.ui.comboBox.currentText()
print("当前的ip是 :", strtemp)
if self.Zmc.handle.value is not None:
self.Zmc.close()
self.time1.stop()
self.ui.setWindowTitle("单轴回零")
iresult = self.Zmc.open_eth(strtemp)
if 0 != iresult:
QMessageBox.warning(self.ui, "提示", "连接失败")
else:
QMessageBox.warning(self.ui, "提示", "连接成功")
str_title = self.ui.windowTitle() + strtemp
self.ui.setWindowTitle(str_title)
self.Up_State()
self.time1.start(100)
(3)通过定时器监控控制器状态。
def Up_State(self):
idlelist = [ctypes.c_int(-1) for i in range(0, 4)]
fdposlist = [ctypes.c_float(0) for i in range(0, 4)]
for i in range(0, 4):
self.Zmc.get_target_pos(i, fdposlist[i]) # 获取当前轴位置
self.Zmc.get_idle(i, idlelist[i]) # 判断当前轴状态
str1 = " {} {} ".format("停止中" if idlelist[0].value else "运行中", round(fdposlist[0].value, 2))
self.ui.lineEdit_X.setText(str1)
str1 = " {} {} ".format("停止中" if idlelist[1].value else "运行中", round(fdposlist[1].value, 2))
self.ui.lineEdit_Y.setText(str1)
str1 = " {} {} ".format("停止中" if idlelist[2].value else "运行中", round(fdposlist[2].value, 2))
self.ui.lineEdit_Z.setText(str1)
str1 = " {} {} ".format("停止中" if idlelist[3].value else "运行中", round(fdposlist[3].value, 2))
self.ui.lineEdit_R.setText(str1)
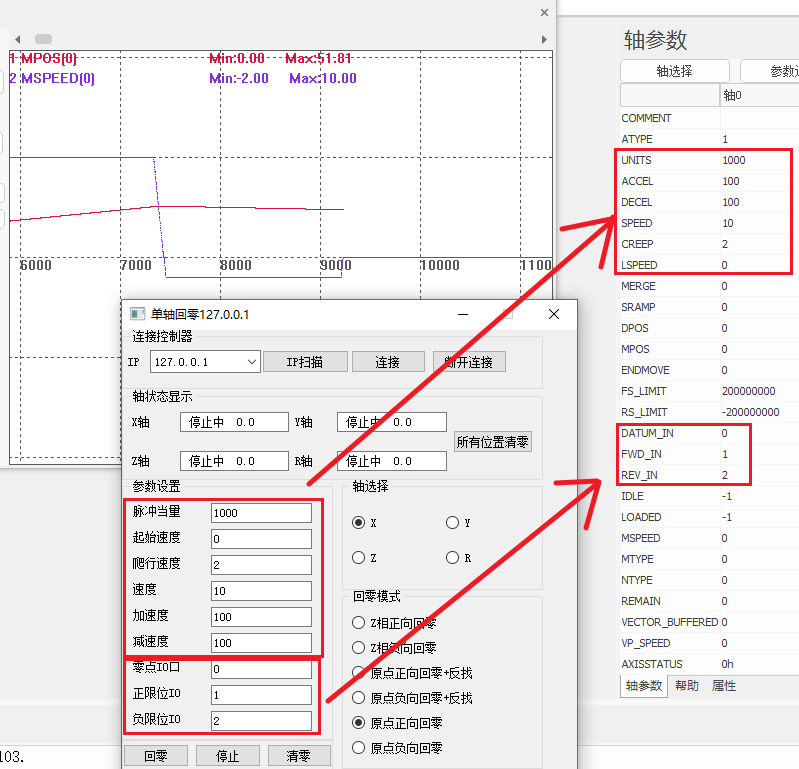
(4)使用回零按钮的事件处理函数对回零运动前的参数进行初始化以及调用对应的回零模式操作回零运动。
def on_btn_run_clicked(self):
if self.Zmc.handle.value is None:
QMessageBox.warning(self.ui, "警告", "未连接控制器")
return
ifidle = ctypes.c_int(0)
self.Zmc.get_idle(self.axis_Num,ifidle)
if 0 == ifidle:
QMessageBox.warning(self.ui, "提示", "运动未停止")
return
# 设定轴类型 7 - 脉冲轴类型 + 编码器Z信号 不用EZ回零也可以设置为1
self.Zmc.set_axis_type(self.axis_Num,7 if self.mode < 3 else 1)
# 设定脉冲模式及逻辑方向(脉冲 + 方向)
self.Zmc.set_invert_step(self.axis_Num,0)
# 设置当量
str_tmp = self.ui.edit_Units.text()
float_tmp = float(str_tmp)
self.Zmc.set_units(self.axis_Num,float_tmp)
# 设置爬行速度
str_tmp = self.ui.edit_CLSpeed.text()
float_tmp = float(str_tmp)
self.Zmc.set_creep(self.axis_Num,float_tmp)
# 设置速度
str_tmp = self.ui.edit_Speed.text()
float_tmp = float(str_tmp)
self.Zmc.set_speed(self.axis_Num,float_tmp)
# 设置加速度
str_tmp = self.ui.edit_Accel.text()
float_tmp = float(str_tmp)
self.Zmc.set_acceleration(self.axis_Num,float_tmp)
# 设置减速度
str_tmp = self.ui.edit_Decel.text()
float_tmp = float(str_tmp)
self.Zmc.set_deceleration(self.axis_Num,float_tmp)
# 设置原点开关
str_tmp = self.ui.edit_zeroIO.text()
float_tmp = int(str_tmp)
self.Zmc.set_datum_in(self.axis_Num,float_tmp)
# 反转 ZMC系列认为OFF时碰到了原点信号(常闭) ,如果是常开传感器则需要反转输入口,ECI系列的不需要反转
if float_tmp != -1:
self.Zmc.set_invert_in(float_tmp,1)
# 设置正限位输入信号开关
str_tmp = self.ui.edit_FWDIO.text()
float_tmp = int(str_tmp)
self.Zmc.set_fwd_in(self.axis_Num,float_tmp)
if float_tmp != -1:
self.Zmc.set_invert_in(float_tmp,1)
# 设置负限位输入信号开关
str_tmp = self.ui.edit_REVIO.text()
float_tmp = int(str_tmp)
self.Zmc.set_rev_in(self.axis_Num, float_tmp)
if float_tmp != -1:
self.Zmc.set_invert_in(float_tmp, 1)
# 单轴回零
self.Zmc.single_datum(self.axis_Num,self.mode)
(5)通过停止运动按钮的事件处理函数来停止当前的运动。
def on_btn_stop_clicked(self):
if self.Zmc.handle.value is None:
QMessageBox.warning(self.ui,"警告","未连接控制器")
return
#如果已经停止则无需操作
isidle = ctypes.c_int(-1)
self.Zmc.get_idle(self.axis_Num,isidle)
if isidle:
return
self.Zmc.single_cancel(self.axis_Num,2)
(6)通过坐标清零按钮的事件处理函数来对当前轴的坐标进行对应清零。
def on_btn_clear_clicked(self):
if self.Zmc.handle.value is None:
QMessageBox.warning(self.ui,"警告","未连接控制器")
return
isidle = ctypes.c_int(-1)
self.Zmc.get_idle(self.axis_Num,isidle)
if not isidle:
QMessageBox.warning(self.ui,"警告","运动未暂停,不可清零")
return
self.Zmc.set_target_pos(self.axis_Num,0)
03
调试与监控
编译运行例程,同时通过RtSys软件连接控制器对控制器状态进行监控。
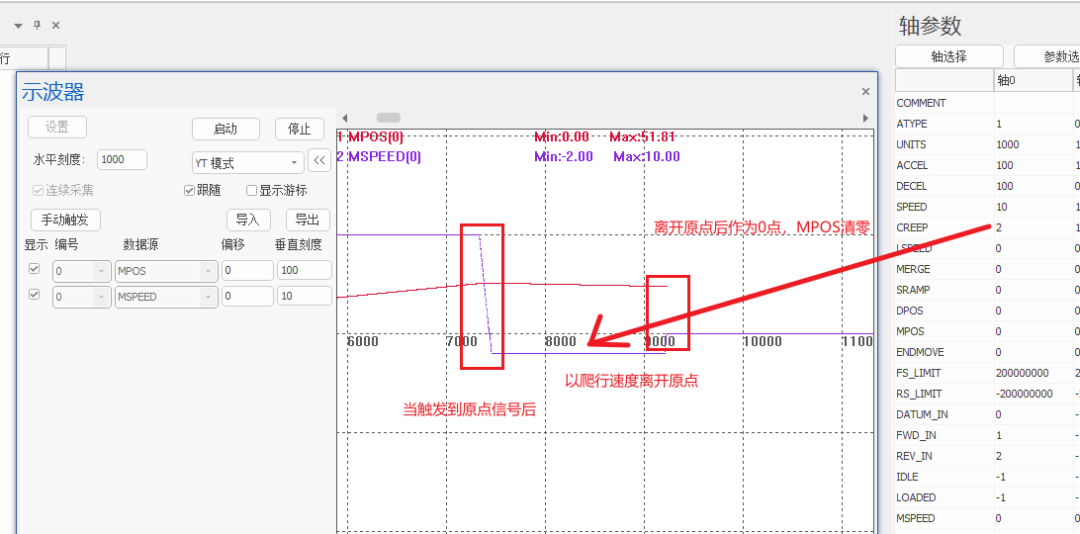
Python+QT进行单轴回零运动例程讲解。
-
EtherCAT运动控制器上位机开发之Python+Qt(三):PDO配置与SDO读写# 运动控制器# 控制卡正运动技术 2024-08-22
-
EtherCAT运动控制器上位机开发之Python+Qt(三):PDO配置与SDO读写2024-08-21 3936
-
EtherCAT运动控制器上位机开发之Python+Qt(二):回零# 正运动技术# 运动控制器# 运动控制正运动技术 2024-08-07
-
EtherCAT运动控制器上位机之Python+Qt(一):链接与单轴运动2024-07-31 2218
-
全国产EtherCAT运动控制边缘控制器ZMC432H如何使用Python+QT实现连续轨迹加工2023-11-06 2376
-
全国产EtherCAT运动控制边缘控制器(六):RtBasic文件下载与连续轨迹加工的Python+Qt开发2023-11-02 1970
-
EtherCAT运动控制器进行自定义API封装例程2023-10-26 1356
-
全国产EtherCAT运动控制边缘控制器(五):IO配置与回零运动的Python+Qt开发2023-10-20 1910
-
EtherCAT运动控制边缘控制器ZMC432H的轴参数配置和单轴运动控制2023-10-16 2669
-
全国产EtherCAT运动控制边缘控制器(四):轴参数配置与单轴运动PC上位机C++控制2023-09-27 2485
-
全国产EtherCAT运动控制边缘控制器(一):ZMC432H硬件接口2023-08-03 2693
-
全国产EtherCAT运动控制边缘控制器-ZMC432H2023-07-29 2127
-
运动控制器轴回零的配置与实现2022-11-12 3002
-
正运动技术运动控制器EtherCAT总线快速入门2021-09-07 2796
全部0条评论

快来发表一下你的评论吧 !
