

毫米波雷达进入集中处理的时代
描述
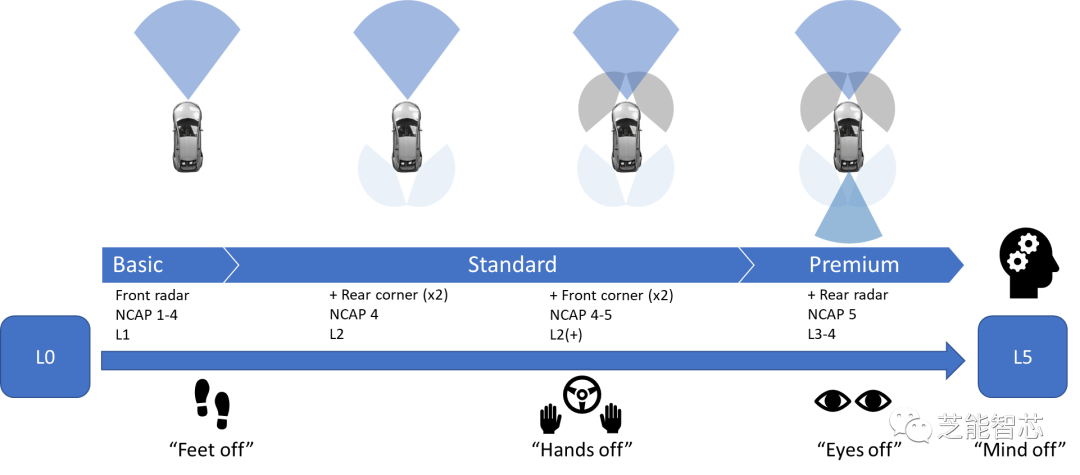
在智能驾驶领域,毫米波雷达技术一直处于不断革新的前沿。随着车辆自动辅助驾驶要求和安全性要求的提高,感知系统也在不断进步。车企正从独立功能的分布式架构转向功能集成的域控制架构,甚至融合域架构。不同车辆功能将集成到更高级别的控制单元中,以提高效率、协同性和降低成本。汽车电子电气架构可能向中央计算+区域控制的中央集中式架构演进,允许主要计算能力集中在中央处理单元,同时利用区域控制单元处理特定功能和感知任务。
、
随着芝能汽车开始导入中央计算单元,其性能预计将快速增长,感知数据处理可以以更有效的方式执行,从而导致EE架构快速迭代演进。毫米波雷达模块的数据处理将从边缘计算向离域处理(离散的、分布式的数据处理)转变,实现更高效的计算。每个模块或控制单元中的处理量将由所需的性能和可用的架构决定。
这和摄像头演进的思路是一致的,毫米波雷达也可以实现类似的架构演变:
● 传统设计:分离式芯片方案,将RF射频前端处理芯片与算力芯片整合为单独雷达ECU和集中智能驾驶计算平台交互(每个模块都有自己的雷达收发器,并且能够使用单个芯片或同一模块上的单独微控制器或SoC来处理板上检测到的数据)
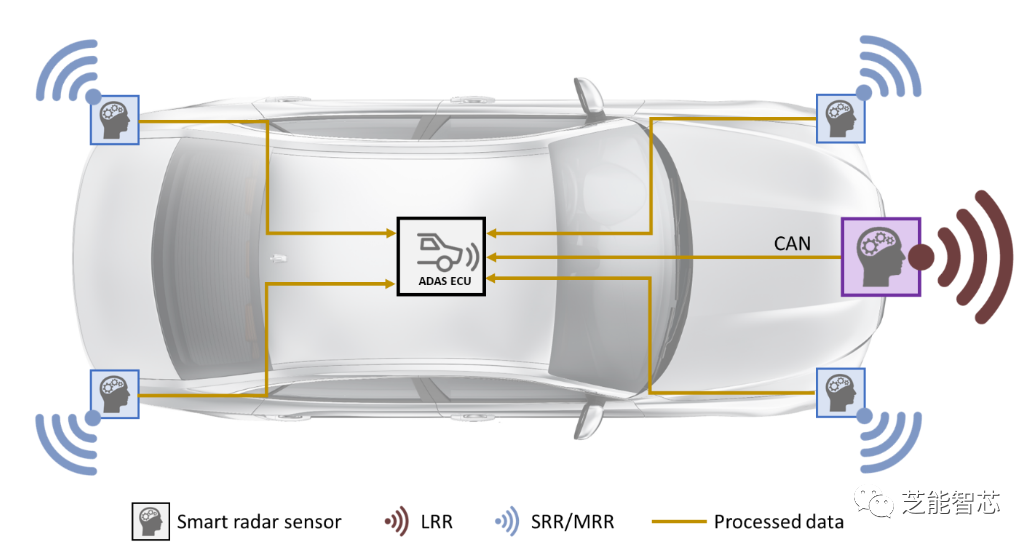
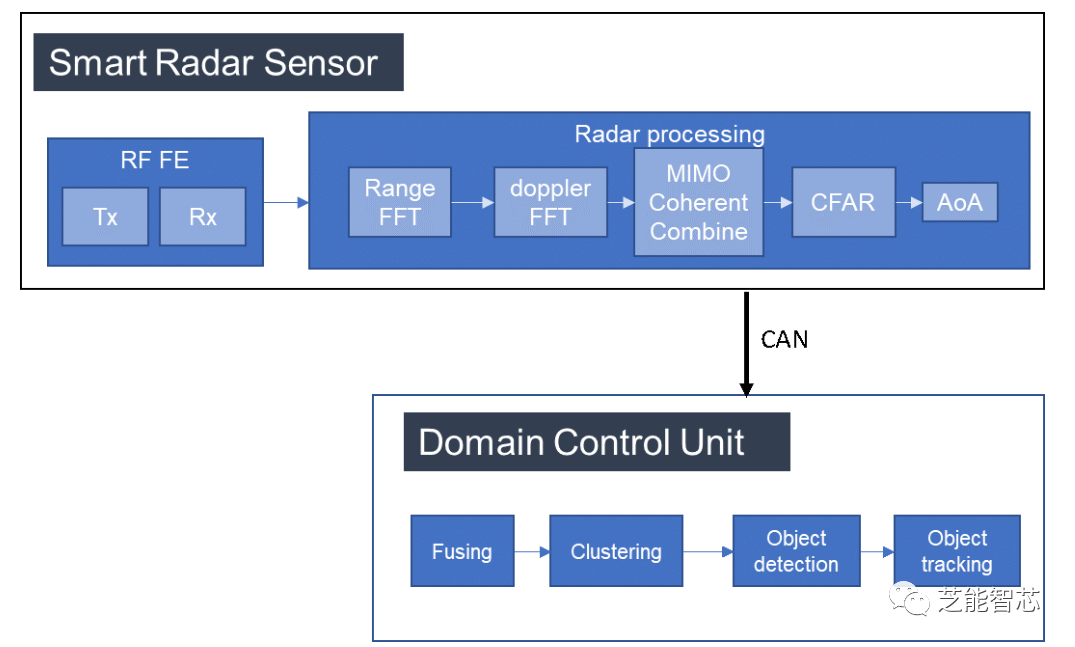
● 集中式设计:集成芯片式方案,将RF射频前端芯片和算力模块集成为单独雷达ECU和集中智能驾驶计算平台交互。处理后的毫米波雷达数据然后从每个“智能雷达传感器”传输到远程域控制单元,以便使用CAN总线进行进一步处理和融合。使用足够多的传感器,车辆可以识别周围环境中的障碍物。接收前视远程雷达以及来自四个角近程和中程雷达检测到的物体的信息,以创建物体的完整图像。
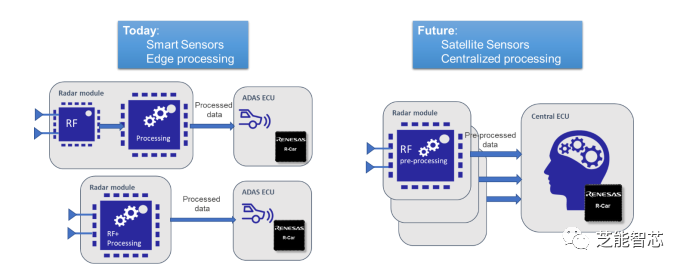
随着集中式计算架构的引入,毫米波雷达模块的数据处理可能会趋向本地化。雷达模块本身将变得不那么“智能”,而卫星雷达单元将能够对接收到的雷达信号执行有限的处理,例如FFT,然后再将数据传输到中央计算平台,将接收来自不同卫星雷达模块的预处理数据,并对每组数据执行主要的雷达处理步骤。这样的架构优势在于节省了尺寸和成本,同时提供了更高效的数据处理和融合。
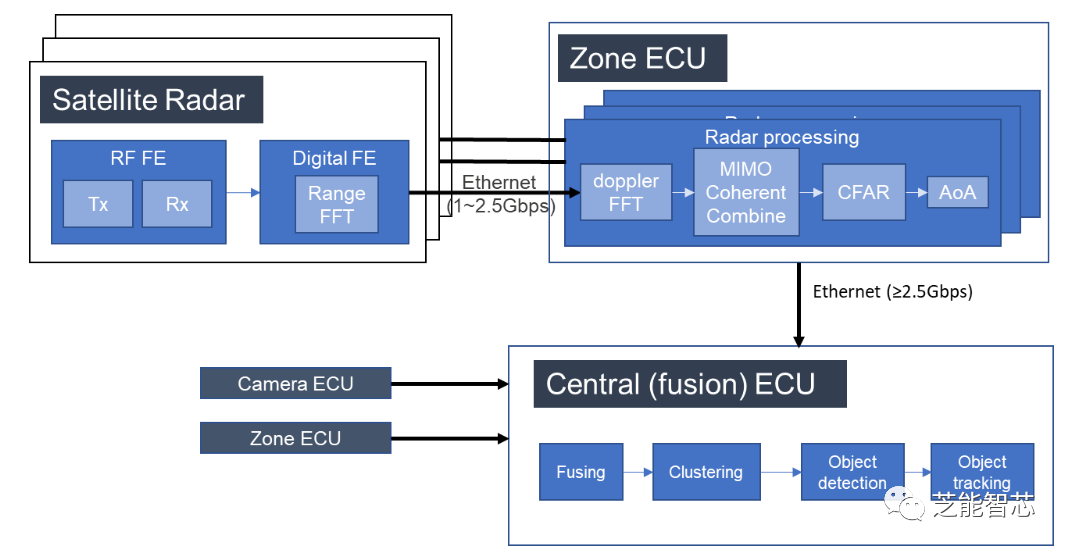
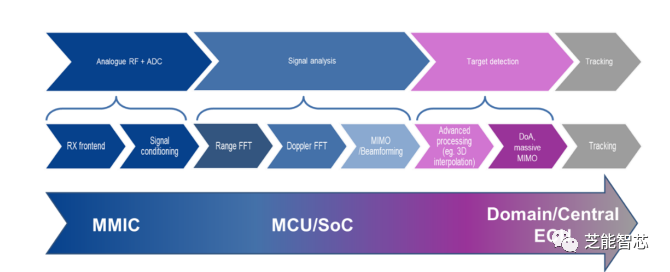
备注:核心是多维FFT的转换、CFAR、窗函数等的处理,以及最终的点云跟踪。处理结果可以进行数据融合,提高检测和环境感知的准确性
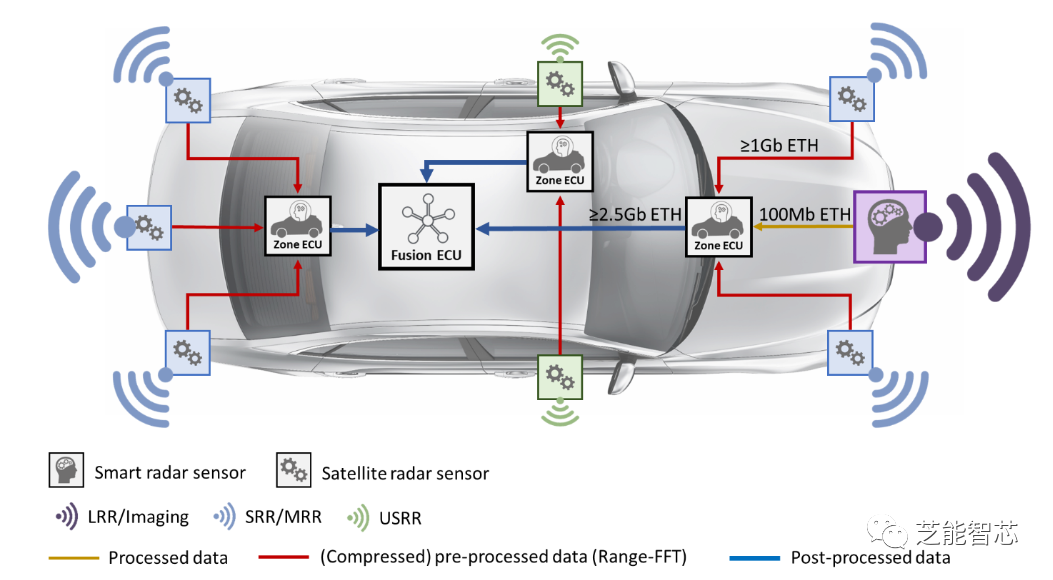
在这种带有卫星雷达模块的集中式架构中,数据将使用车辆的以太网骨干网传输到ECU。使用车辆的控制单元进行处理不仅可以更有效地处理雷达数据,而且可以进行更复杂的操作。与摄像头或激光雷达等其他传感器、机器学习和人工智能的数据融合现在可用于优化环境的传感和表征,这将有助于实现更高水平的自动驾驶。
● 主要优势
◎ 优化产品机械结构,节省尺寸和成本,便于维修和升级,减少散热问题。
◎ 优化产品线缆,通过车辆骨干网络传输数据,降低线缆成本和重量。
◎ 实现软硬分离和解耦,便于更换硬件厂商和雷达算法的OTA升级。
◎ 在中央集成式架构下,利用更高级的算法实现多雷达之间的融合,推进雷达和相机的前融合方案。
● 面临挑战
◎ 大数据量处理增加了域控制器端的硬件成本。
◎ 主流高算力芯片对雷达算法的支持和兼容性需要提高。
◎ OEM对卫星雷达的认可度较低,需要更多实际案例推动市场认知。
◎ OEM主要以目标级别数据为主,对直接ADC数据的使用存在技术难度。
结论:以后毫米波雷达就是一个芯片和组装的工作,这也是最终软件来实现差异化的。
-
毫米波雷达工作原理 毫米波雷达应用领域2024-12-03 4566
-
什么是毫米波雷达?毫米波雷达模组选型2024-09-06 4005
-
ADAS系统无人驾驶的眼睛毫米波雷达2023-04-18 2325
-
关于电磁波与毫米波雷达之间的影响2022-04-23 39283
-
漫谈车载毫米波雷达历史2022-03-09 12079
-
毫米波雷达的特点是什么2021-07-30 7388
-
毫米波雷达(一)2019-12-16 14995
-
浅析车载毫米波雷达2019-09-19 6962
-
车载毫米波雷达的原理是什么?2019-08-07 7644
-
毫米波雷达是什么?2019-08-02 4710
-
车载毫米波雷达的技术原理与发展2019-05-10 6212
-
求推荐毫米波雷达2018-12-25 4909
-
毫米波雷达方案对比2018-08-04 12483
-
毫米波雷达的应用场景_毫米波雷达技术及应用大解析2018-04-24 48388
全部0条评论

快来发表一下你的评论吧 !
