

 速锐得解码匹配特斯拉电动汽车安全性能检测车架号及BMS电池数据
速锐得解码匹配特斯拉电动汽车安全性能检测车架号及BMS电池数据
电子说
描述
电动汽车三大件分别是电池、电机和电控。到目前为止,电机技术已经非常成熟,直流永磁电机、永磁同步电机已经取代了异步电机,成为电动汽车的主流。很多人认为电动汽车最后一道技术门槛是电池,但在我国,汽车制造商在制造新能源车时,并没有什么电池技术障碍是无法克服的。
通过比亚迪的电池、宁德时代的电池来看,与特斯拉采用的日本松下电池在性能上还是存在差异,松下电池是高成本堆出来的超高性能东西,这毋庸置疑的。要知道,特斯拉用的台湾富田电机并不是很先进,在这个条件下,就需要强大的BMS系统,也就是整个电动汽车的核心,就像我们手机电量显示的百分比例,其实就是手机里的BMS在工作的结果。特斯拉电池采用的是圆柱电池设计,具有更好的散热和安全性能,内阻非常小,本身电耗比较低,电芯采用镍钴铝材料,也能让电池密度更强。
在汽车安全性能检测,要采集BMS系统的电池信息,直接“万用表模式”车上测试电池电压,那肯定是不准的,这种在线电压的粗略判断,误差极大,在线电压不可能用在需要精准测试的场合。而电池的活性根据不同温度、不同释放效率,充放电的效率都会有不同,南北的特斯拉车主会觉得同样驾驶特斯拉,表现最明显的是续航差异很大,这也就是电池活性决定的。
由此可见,BMS电池管理系统的技术,除了电池本身以外,是更为复杂、更为核心的数据管理难题,而在电动汽车安全性能检测场景下,BMS相关的数据又是需要极多,那么,突破数据关卡,也是基于对BMS的理解,对CAN报文、电控系统熟悉的一个关键所在。
特斯拉的BMS电池管理系统的主板包括2个微处理器,一个是德州仪器的TMS570LS0432,封装为LQFP176,一个是飞思卡尔SPC5764CSMKU6,封装为LQFP100,副MCU TM570可以检测主MCU SPC5764工作状态,一旦发现其失效可获取控制权限。之前速锐得EST527的OBD模块在2013年就采用过这个技术,主控MCU采用PIC,副控MCU采用M0架构的芯片。硬件上的功能上:主MCU负责电流检测、CAN通信等。副MCU负责高低边驱动、HVIL检测、高压、绝缘、CMC通信等。
特斯拉的电控系统采用“一主四从”的管理方式,有一个BMU中心,四条BMS系统线路分布其中,所有的电池电控系统都集成在Penthouse位置,这种高度集成的电控系统也是特斯拉引以为傲的特点,BMS采用模块化设计,即使使用不同类型的电池,仍可适配良好,展现出高度的包容性。那么在CAN数据,通过速锐得SPY3解码匹配发现,基本上可以直接从内部CAN读取一些电芯级别的数据,包括车辆状态中的停车、行驶、未充电、充电完成、异常、预留状态,新能源汽车SOC、车辆识别代号(VIN号)、绝缘电阻值、车速、环境温度、驱动电机温度、IGBI温度、加速踏板位置、制动踏板位置。
还有BMS中的单体电池电压最高值、最高电压电池子系统号、最高电压电池单体代号、单体电压最低值、最低电压电池子系统号、最低电压电池单体代号、电池组温度最高值、最高温度子系统号、电池组温度最低值、最低温度子系统号、最低温度探针单体代号、单体电池总数、单体电池包总数、电机转矩、电机转速、电机母线电压、电机母线电流、驱动电机功率、电机控制器输入电压、电池报警信息、电机报警信息、电控报警信息,驱动电机电压和电流、驱动电机状态。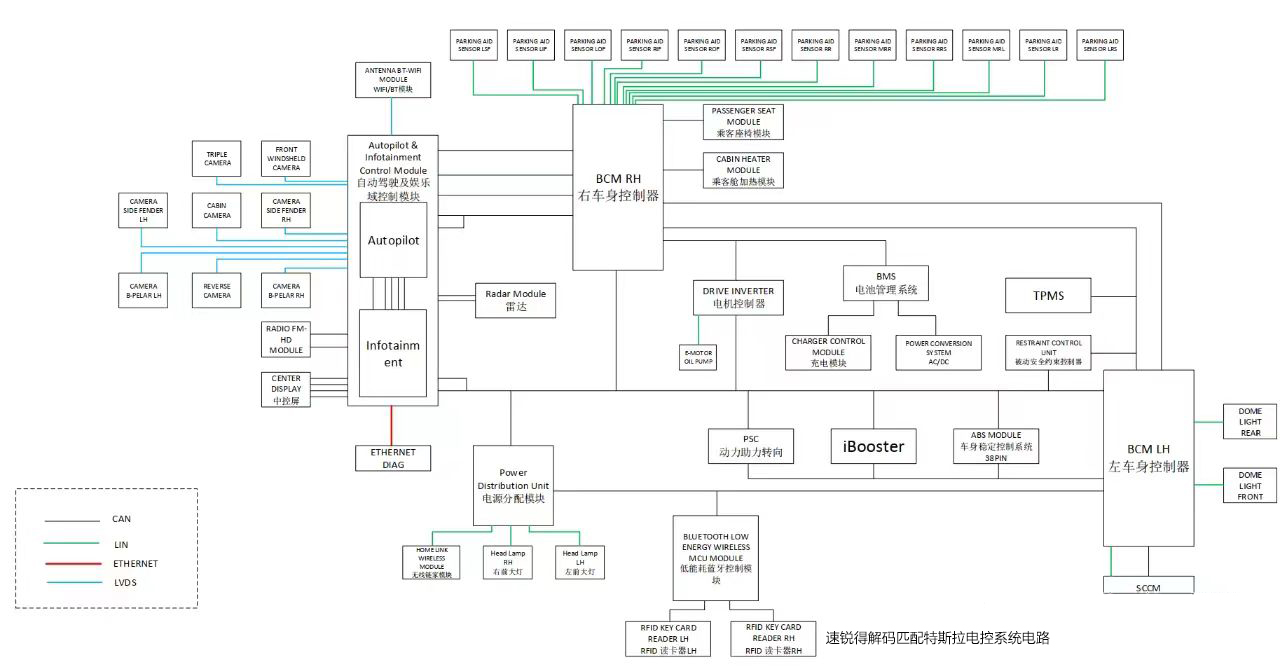
其实,也有不用SPY3的朋友获取过这些CAN报文及BMS信息,只是从逻辑和DBC控制策略上,略有差距,有的只能做到只知其表,不知其源,想要做更高级的事,可能就会捉襟见肘了。特斯拉总线上,每秒产生2700帧数,包括了300多个CANID,DBC控制策略中能解码匹配120多个CANID,对应的大概是2000个信号。
要注意的是,特斯拉在车载总线中引入了以太网,所以特斯拉汽车网关还负责以太网与CAN总线之间的数据过滤和转发。以上。
审核编辑:汤梓红
-
电动汽车锂电池需要进行哪些安全性能测试2023-10-25 2040
-
电动汽车BMS PCB设计的要点2023-10-18 2106
-
新能源电动汽车安全性能检测中采集车架号及BMS电池数据的难点2023-10-10 1485
-
电动汽车BMS设计落地云,采用数字孪生2023-03-03 1377
-
电动汽车电池安全性能检验项目包含哪些?2023-02-08 4136
-
混合动力汽车和电动汽车的无线BMS的关键问题2022-11-08 1097
-
电动汽车蓄电池你了解多少?2022-04-15 4613
-
回收电动汽车电池,电动汽车电池回收,回收电动汽车电池组,电动汽车电池组回收,回收电动汽车电池组回收2021-11-15 1598
-
如何提高电动汽车的效率和安全性?2021-11-09 3201
-
优化电动汽车的结构性能2021-09-17 2761
-
电动汽车用动力蓄电池安全测试GB 38031-2020检测项目有哪些?2021-06-19 2142
-
电动汽车热管理系统和性能2021-04-23 4162
-
电动汽车的高性能运行离不开这项试验2018-11-09 3148
-
电动汽车用动力电池环境下的安全性能2018-09-26 4564
全部0条评论

快来发表一下你的评论吧 !
