

伺服电机的调试方法 伺服电机的工作原理
工业控制
描述
伺服电机是一种能够将电能转化为机械能的装置,它可以精确地控制速度和位置,具有反应快速等特点,通常被应用在自动控制系统中执行元件,是伺服系统中的重要组成部分。
01 伺服电机的工作原理
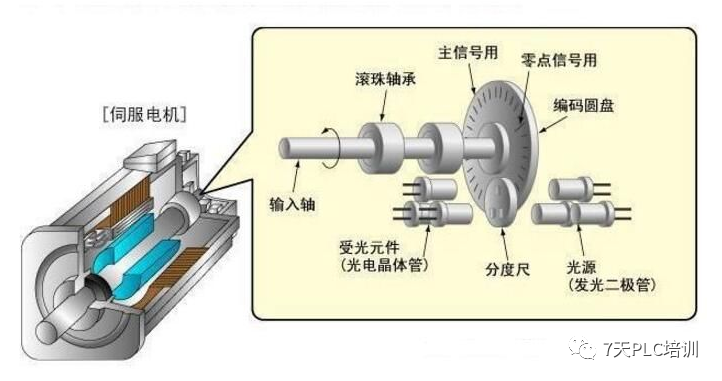
伺服电机主要由伺服驱动器、电动机和其他相关部件组成。伺服马达用来提供动力,而伺服控制器则负责调整输出速度和位置,并将其转化为电信号发送给执行机构。
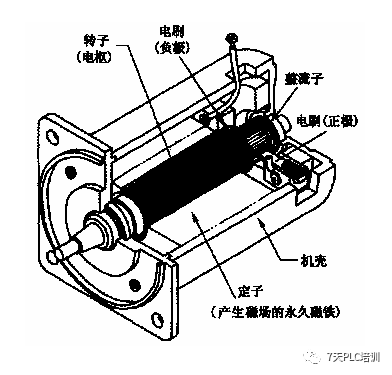
伺服电动机通常由两部分组成:一组感应电动机,另一组是被称为转子的飞轮。当转子旋转时,产生电磁场,带动另一个被称为马达的小型机械零件工作。转子上有两个不同的线圈,它们与吸盘连接在一起。吸盘会把转子上面的线缠绕起来,使整个马达看起来像一把剑。齿轮装置使得转子旋转顺畅,同时也限制了噪音。
02 伺服电机的调试方法
1、初始化参数
在接线之前,先初始化参数。
在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。一般来说,建议使伺服工作中的最大设计转速对应9V的控制电压。
2、接线
将控制卡断电,连接控制卡与伺服之间的信号线。以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
3、试方向
通过控制卡打开伺服的使能信号。一般控制卡上都会有抑制零漂的指令或参数。使用这个指令或参数,看电机的转速和方向是否可以通过这个指令控制。如果不能控制,检查模拟量接线及控制方式的参数设置。
4、抑制零漂
在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。使用控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。由于零漂本身也有一定的随机性,所以,不必要求电机转速绝对为零。
5、建立闭环控制
输入控制卡能允许的最小值,将控制卡和伺服的使能信号打开。这时,电机应该已经能够按照运动指令大致做出动作了。
6、调整闭环参数
细调控制参数,确保电机按照控制卡的指令运动。
03 伺服电机故障及维修 1、电源故障 这类故障主要是由于供电不稳定、过压或欠压、短路或断路等导致的。 维修方法:检查并更换损坏的元件、调整电源参数、加装保护装置等。
2、编码器故障 这类故障主要是由于编码器本身的损坏、松动或污染等导致的。 维修方法:清洁或更换编码器、重新校准或调整参数等。
3、驱动器故障 这类故障主要是由于驱动器内部的元件损坏、过热或过载等导致的。 维修方法:检查并更换损坏的元件、降低温度或负载、复位或清除报警等。
4、传感器故障 这类故障主要是由于传感器本身的损坏、松动或污染等导致的。 维修方法:清洁或更换传感器、重新连接或调整位置等。
5、机械故障 这类故障主要是由于机械结构如轴承、齿轮、联轴器等的磨损、松动或断裂等导致的。 维修方法:润滑或更换磨损部件、紧固或对齐松动部件、更换断裂部件等。
6、控制系统故障 这类故障主要是由于控制系统的软件或硬件出现问题导致的。 维修方法:检查并更新软件、更换或修复硬件、重新设置或调试参数等。
编辑:黄飞
-
什么是伺服电机?伺服电机的工作原理是什么?2024-10-22 4276
-
伺服电机转速调整方法2024-07-14 4601
-
伺服电机压力机工作原理是什么2024-06-17 4120
-
交流伺服电机工作原理 交流伺服电机的控制方式2024-02-18 4956
-
伺服电机的结构和工作原理是什么2024-02-02 6387
-
伺服电机工作原理 伺服电机控制方式有哪几种2024-01-31 5116
-
伺服电机的工作原理是什么?2023-08-26 5570
-
伺服电机的引脚图/工作原理/应用2023-06-29 5712
-
伺服电机的工作原理是什么2021-10-11 5256
-
伺服电机工作原理是什么2021-08-06 34686
-
伺服电机选型计算最简单方式_伺服电机的工作原理2018-04-25 43703
-
伺服电机工作原理2010-01-09 4264
-
交流伺服电机的工作原理2009-05-06 42449
全部0条评论

快来发表一下你的评论吧 !
