

MOVIPRO:电机初始化Starting up the motor encoder
工业控制
描述
为了简单起见,MOVIPROADC设备的启动被设计为像“配方”一样读取。出于这个原因,我们主要依靠屏幕截图,尽可能避免描述。
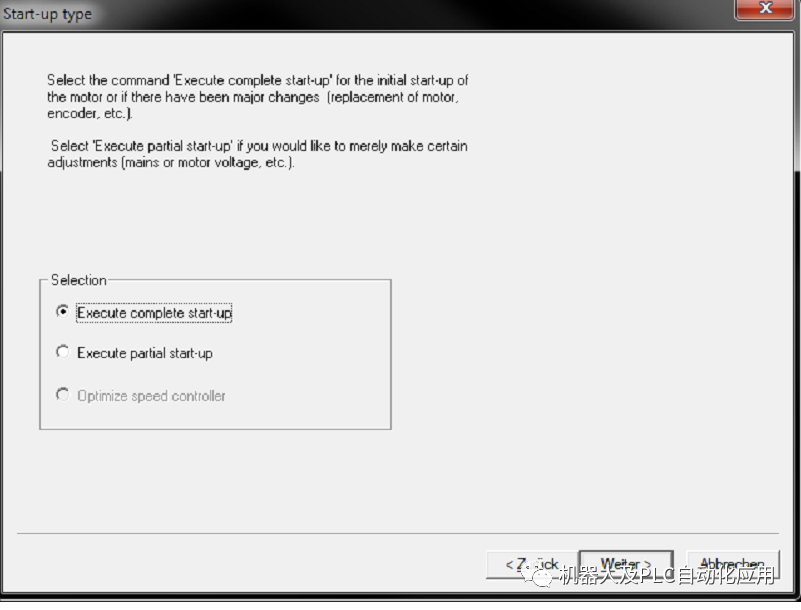
在MMS中,右键单击MOVIPRO的电源部分,开始启动电机。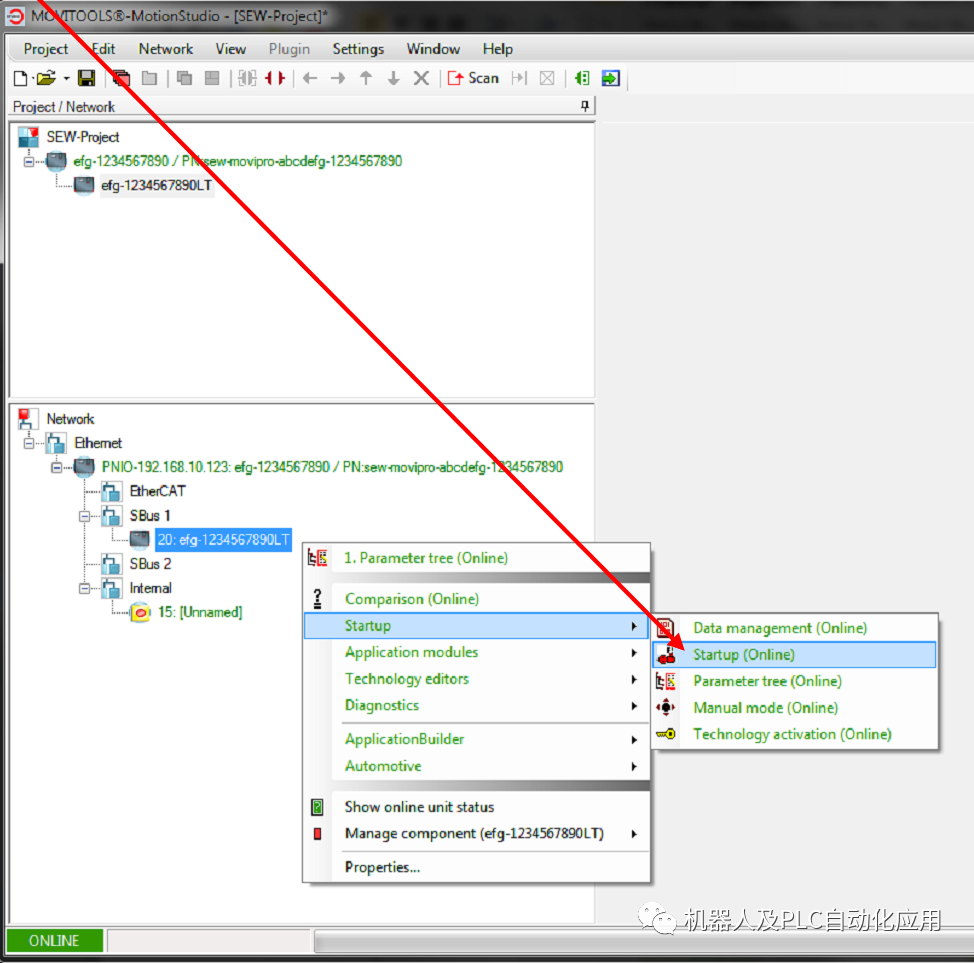
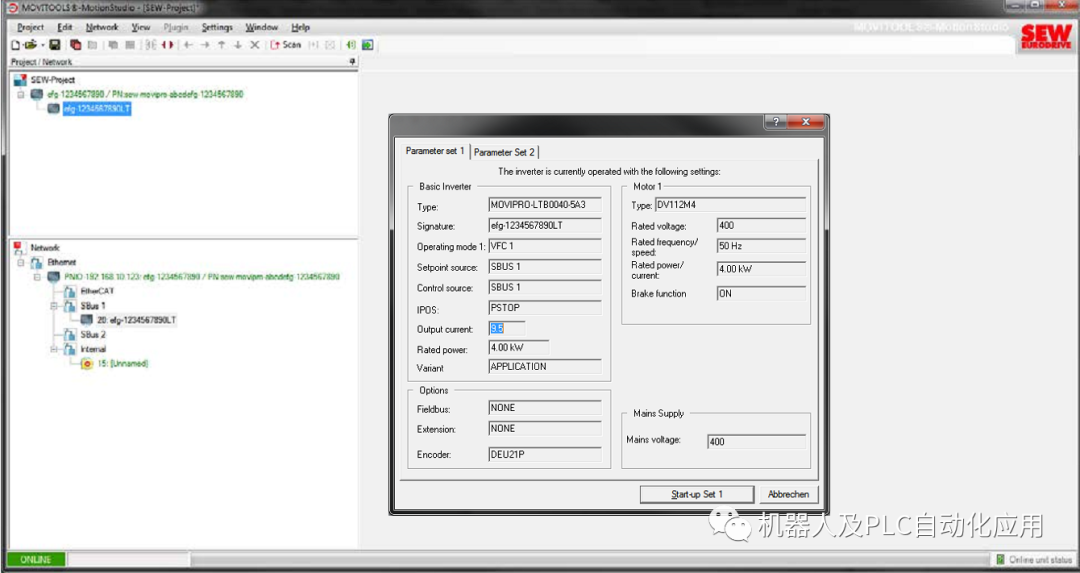
这将打开启动界面。然后左键单击“执行启动”。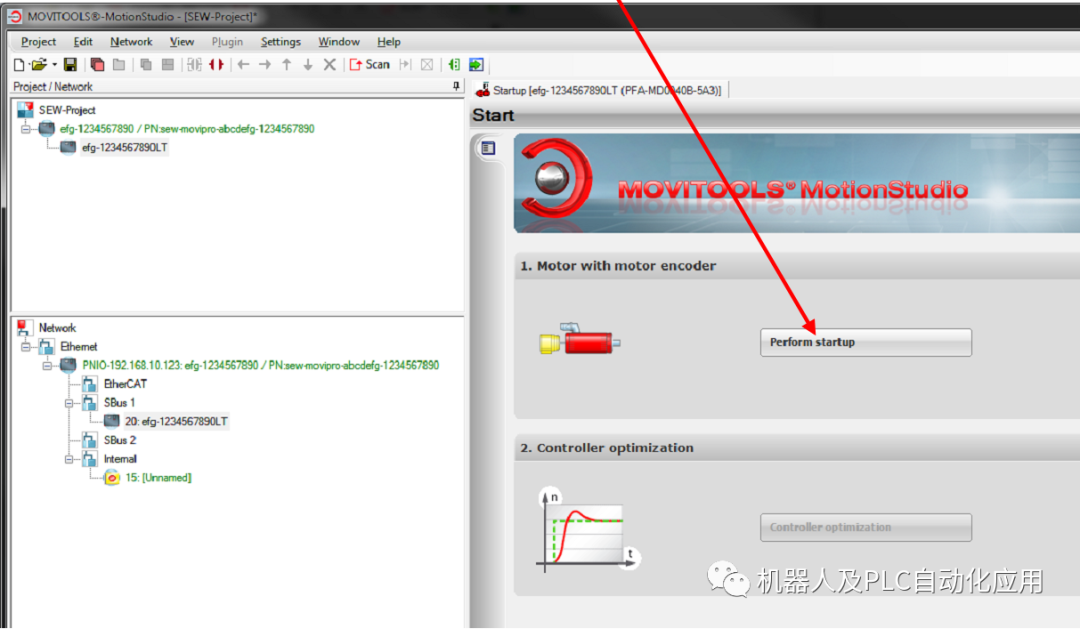
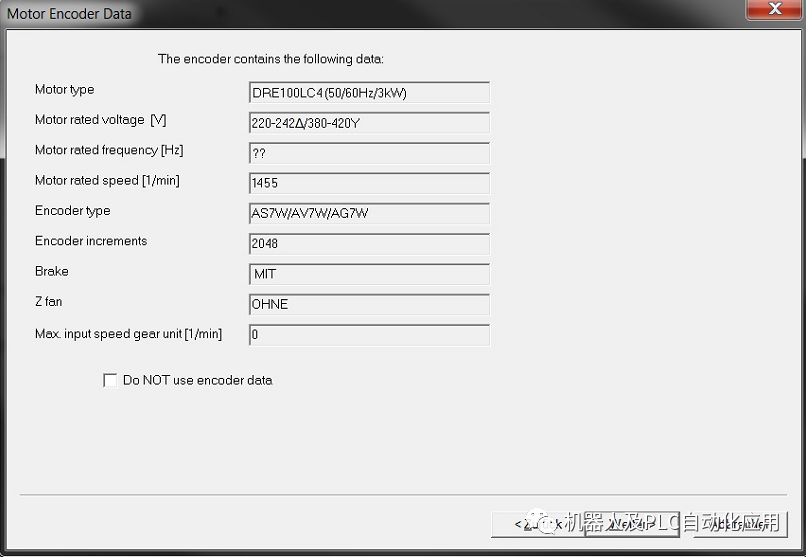
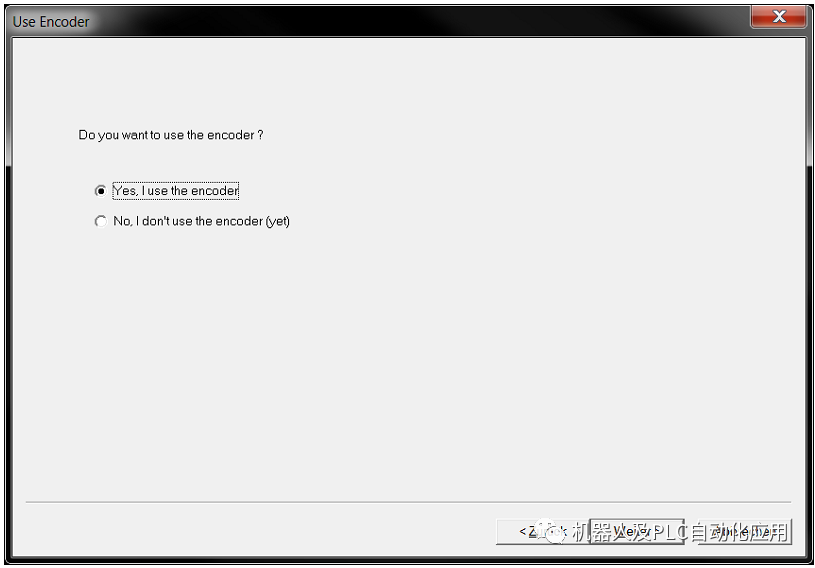
电机编码器:绝对编码器 首先,配置连接到MOVIPRO设备的所有编码器的设置。
SEW绝对编码器(例如AS1H、AK0H或AS7W)具有电子铭牌。
如果MMS识别出电子铭牌,则该数据将被永久接受。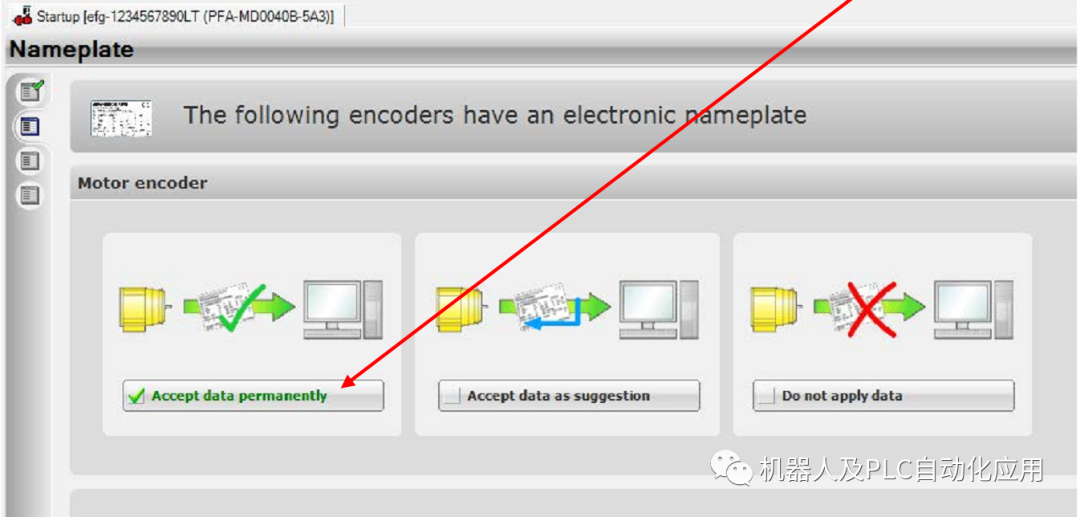
 数据将进入下一步。
数据将进入下一步。
根据需要,可以通过左键单击“设置”来显示数据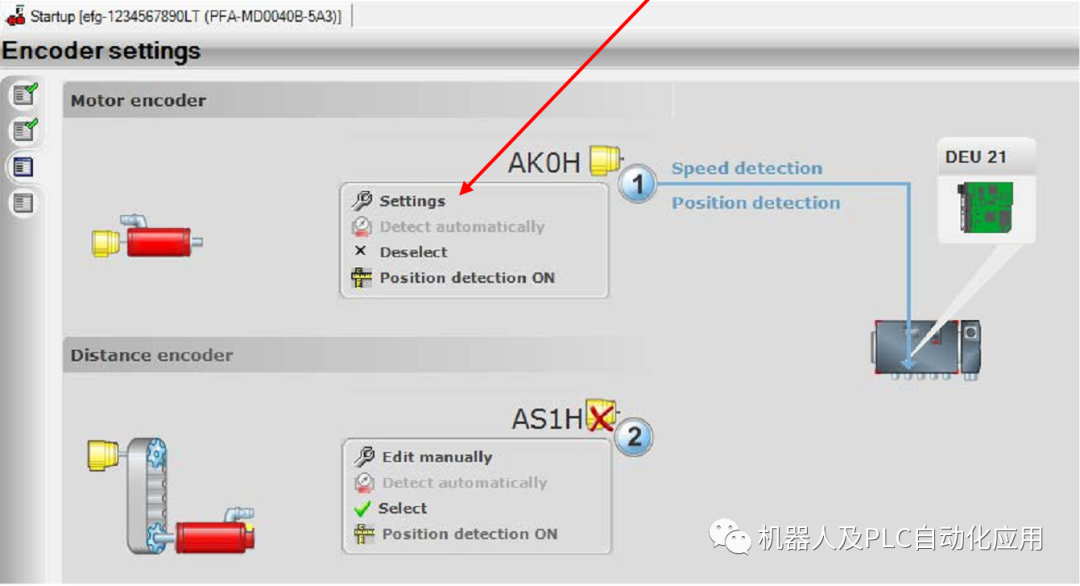
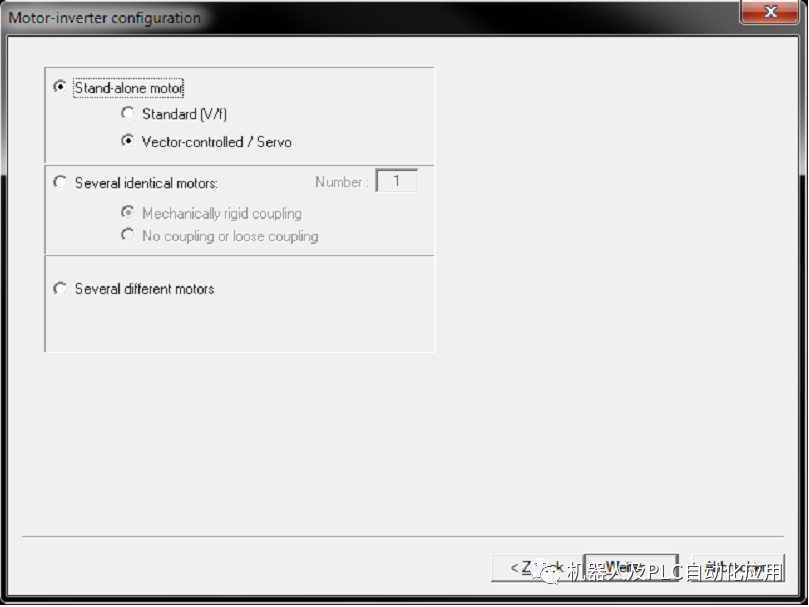
为了执行完全启动,可以选择电机和距离编码器,从而区分带电子铭牌和不带电子铭牌的编码器。
带有电子铭牌的编码器可自动识别。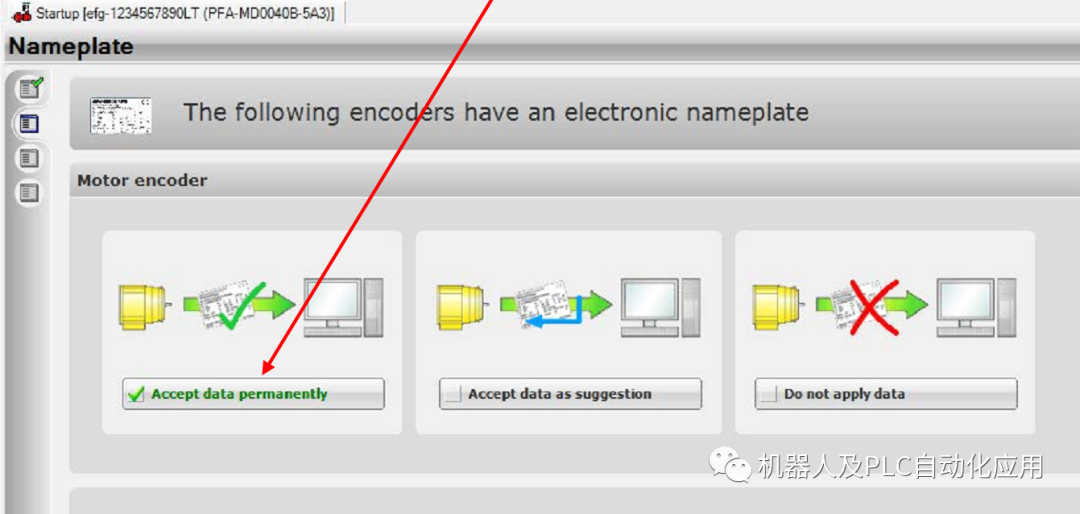
本说明不包括任何其他设置,因为只有在特殊情况下才需要这些设置。
单击 进行确认。
进行确认。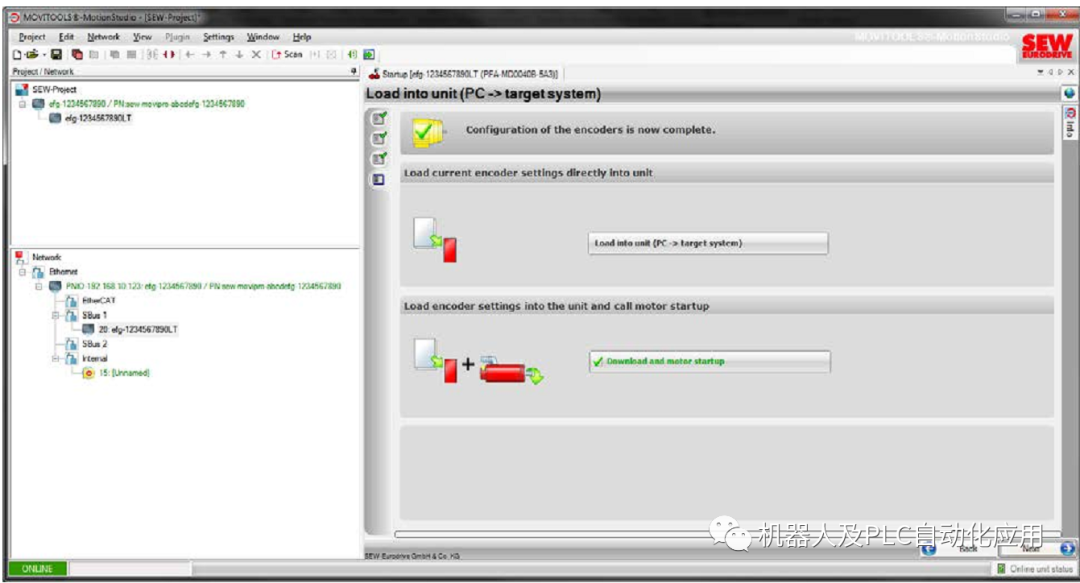
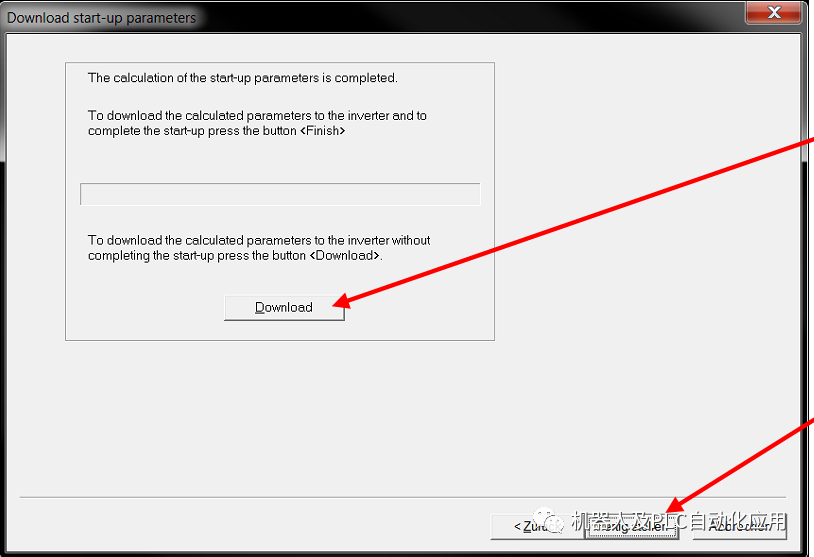
必须选中“下载”框。
然后再次单击 。
。
设置加载到逆变器中,实际电机启动屏幕打开。
Motor startup 电机初始化 不可能在没有编码器启动的情况下启动电机。
完成编码器配置后,电机启动窗口打开: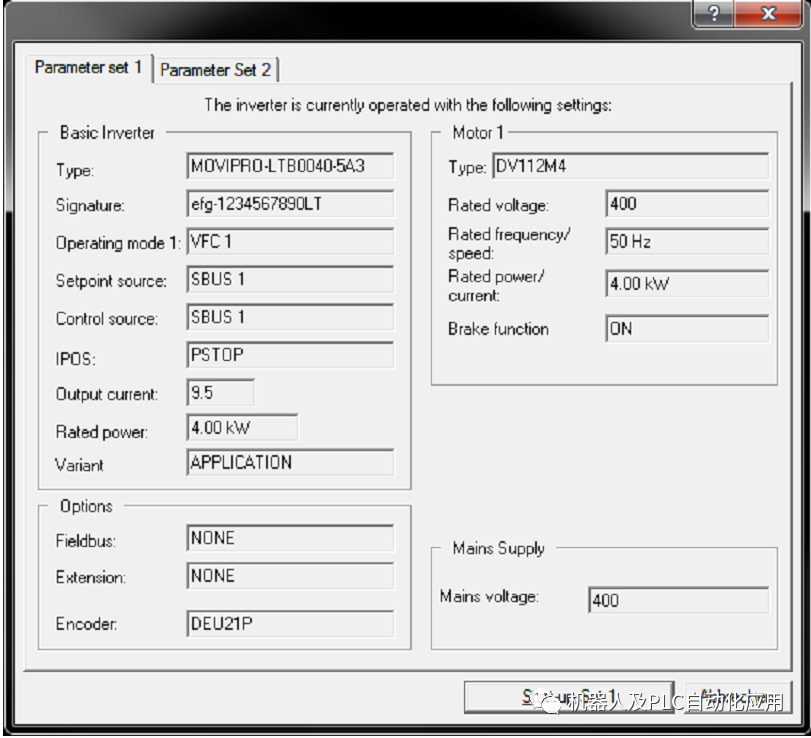
接下来,执行参数集1的启动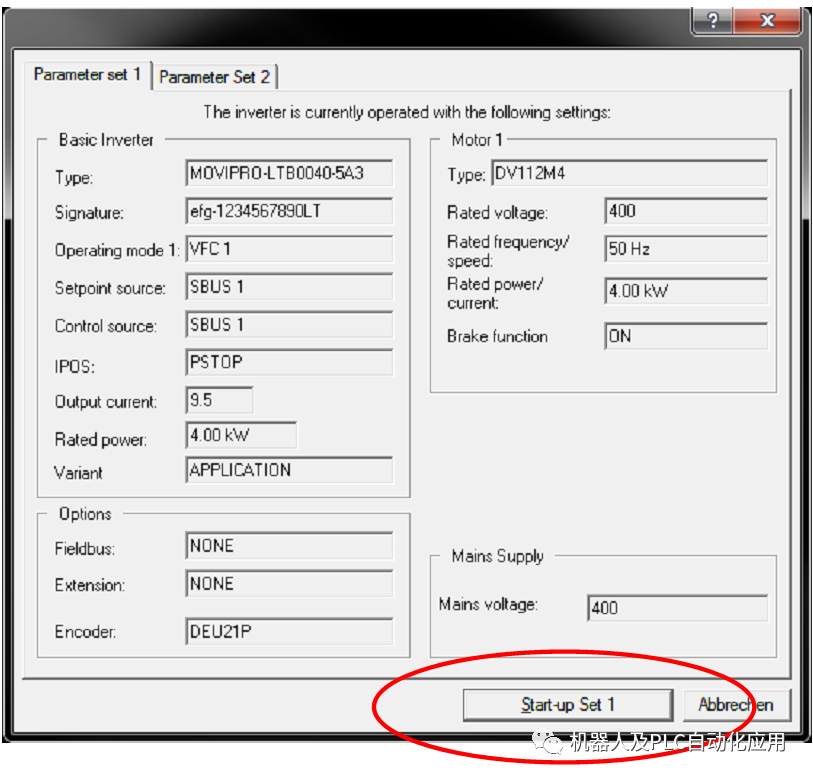
电机类型由电子铭牌决定,因此此处无法进行选择:
对于异步电机,必须在下一个窗口中输入电机的连接类型和热保护:
例如:电机绕组230/400 V 三角形连接电机:
电机额定电压230 V,电机额定频率50 Hz 星形连接电机:
额定电机电压400V,额定电机频率50Hz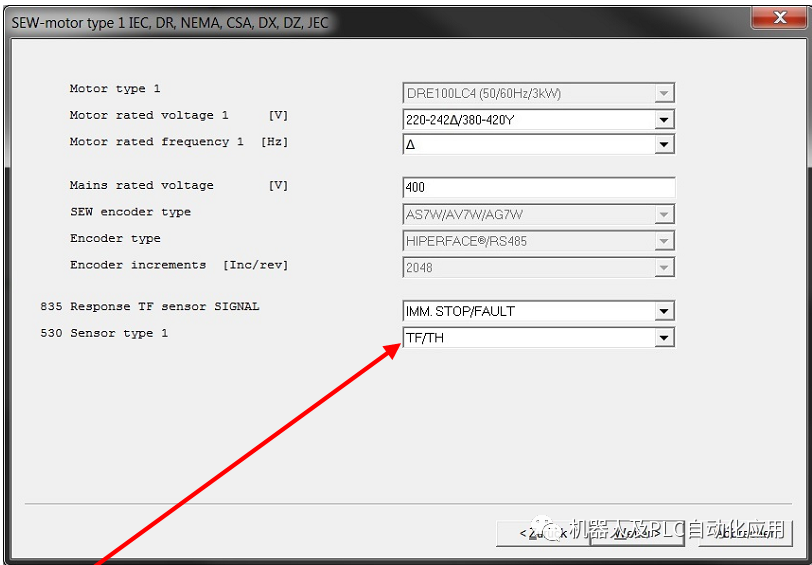
TF消息的反应和传感器类型必须设置为启用电机的热保护!
电机铭牌上规定了传感器类型。
在本例中:
RF47 DRE100LC4BE5/HR/IS/TF/AS7W
在这种情况下,存在TF热传感器。在伺服电机的情况下,还使用KTY传感器类型。
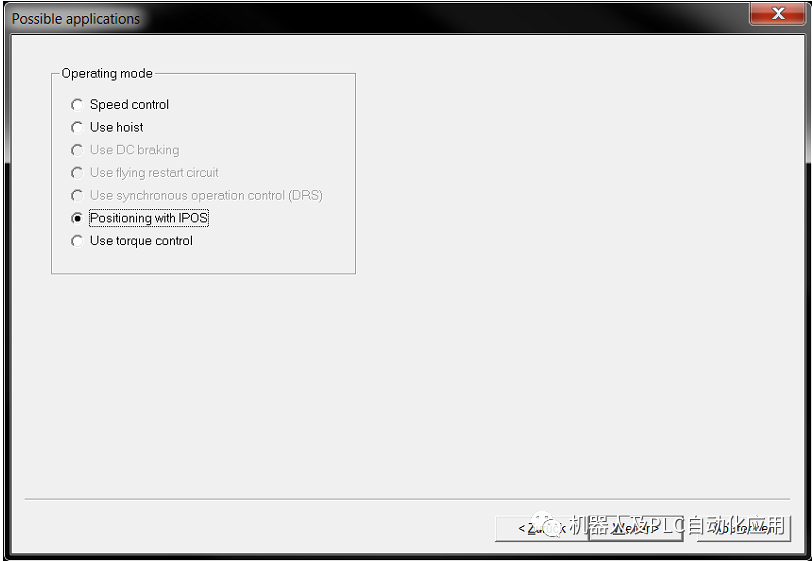
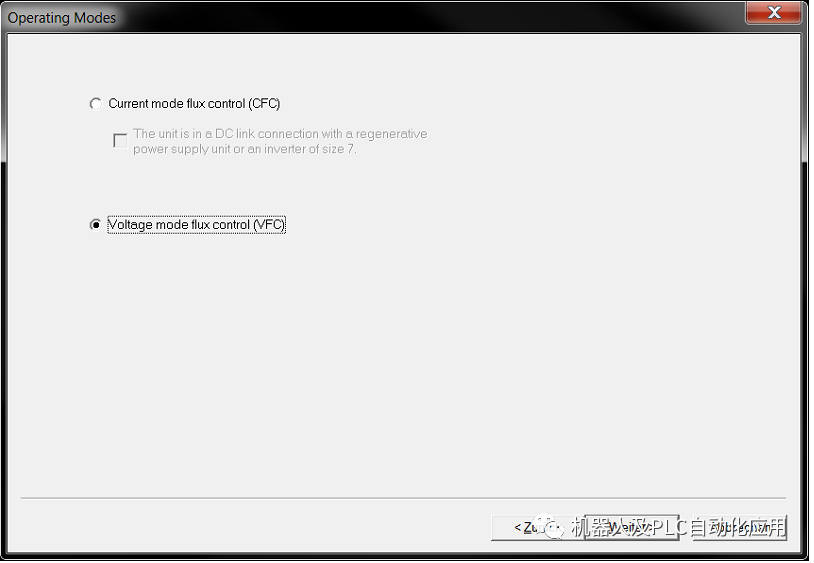
此处根据项目规划和应用程序选择操作模式。
在本例中,您必须在速度控制器屏幕中输入值“67,23”。
转换系数显示在速度控制器屏幕上。
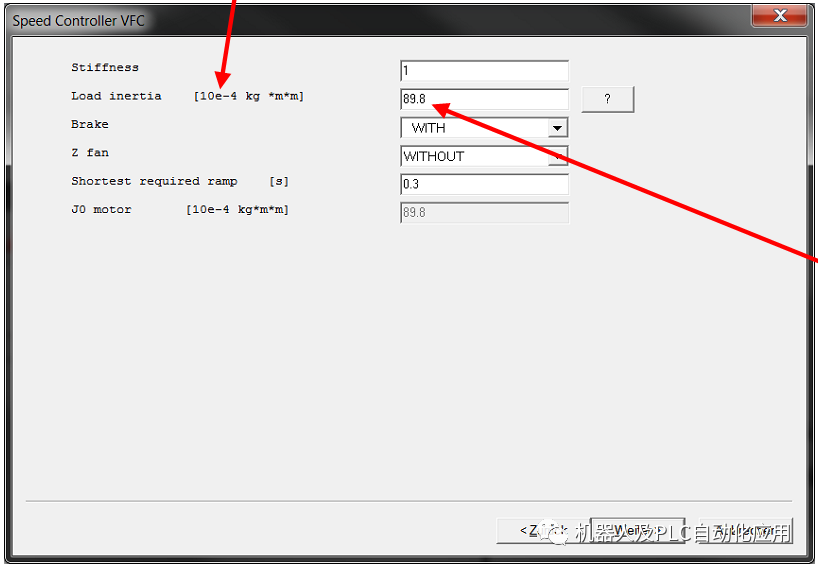
如果SEW项目规划不可用,您至少可以输入电机的负载惯性(J0电机,最后一行),或根据应用情况输入更大的值,用于初始启动。
根据经验,起重机:负载惯性=1 x电机惯性矩
对于手推车:负载惯性=5 x电机惯性矩
经验法则:提升=89,8
小车=449
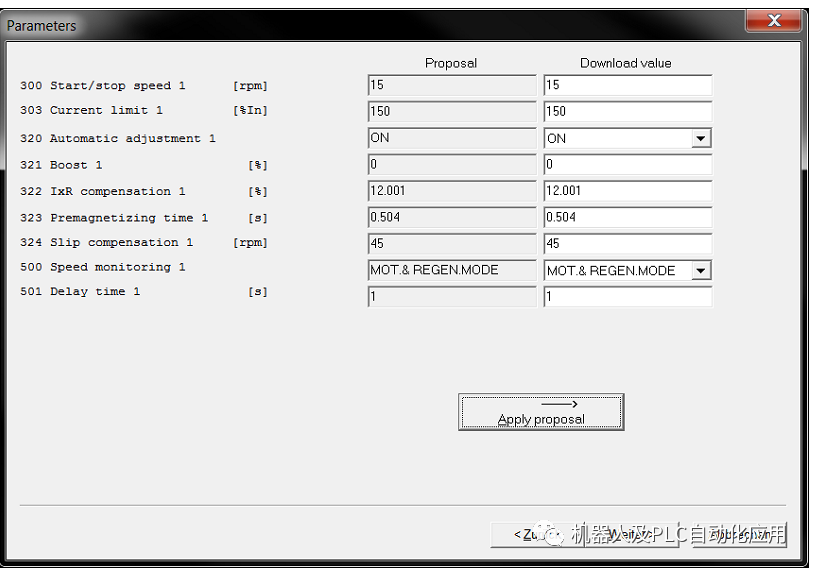
使用,您可以简单地输入下一个参数作为下载值,或者,如果需要,在右侧列中调整这些参数。此处显示的值仅为示例。
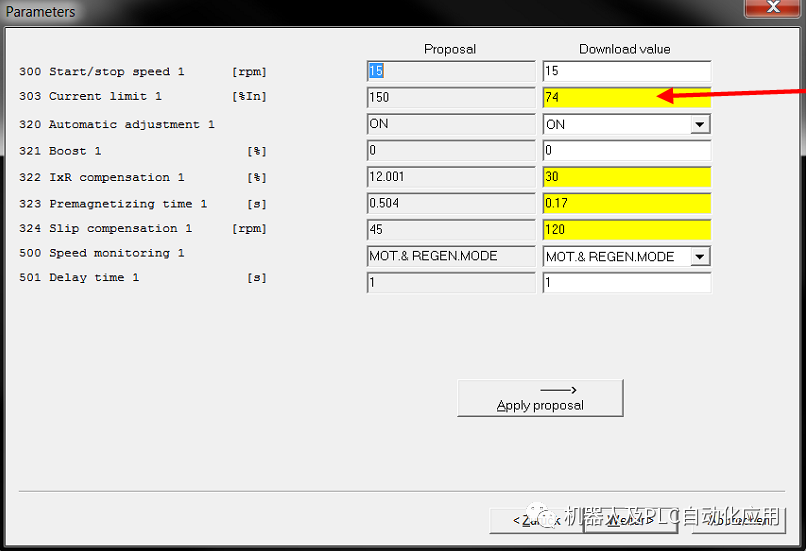
与建议不同的值以黄色显示。
SS1(c)的快速停止斜坡P136,符合IEC 60204-1
安全功能SS1(安全停止1)使被控制的电机减速至静止,并且在安全时间t之后,安全地中断对电机的供电(STO)。
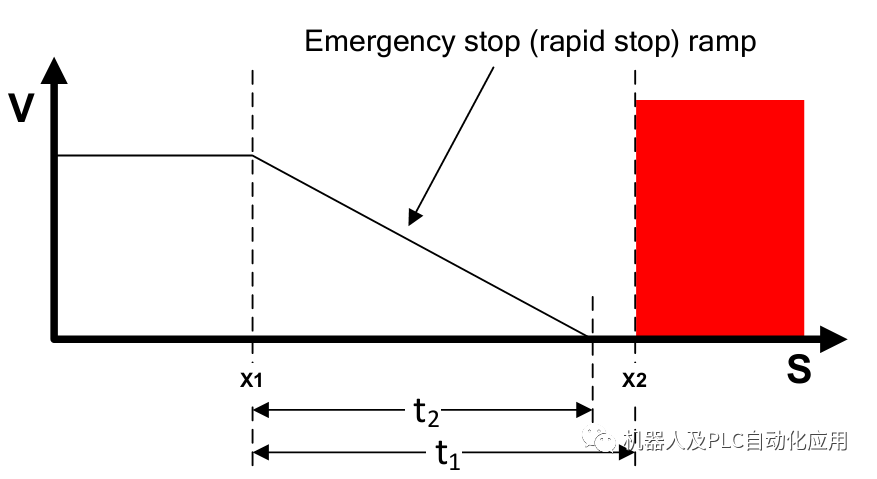
在机械项目规划期间的安全分析中将确定允许的时间(t2),在此时间之后,在紧急停止(快速停止)的情况下,驱动器必须安全地静止。
延迟时间“负载断开安全PLC K100(t 1)”必须大于/等于紧急停止斜坡的延迟时间(t2)。这是必要的,以便驱动器可以减速控制到静止状态。PLC K100结束时,时间(t1)“STO”切换。
参数P136(停止斜坡)的值通过紧急停止斜坡(t2)、P302的最大速度和1.500rpm的速度跳变(固定参考值)计算如下:
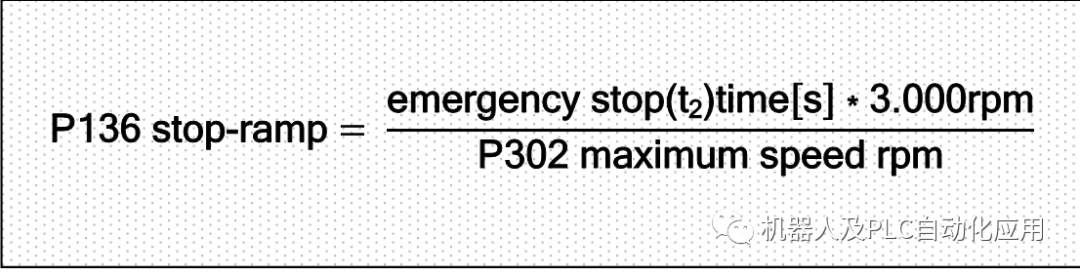
计算值(0.84s)必须输入此处(快速停止斜坡)和此处(出现n-cy停止斜坡):
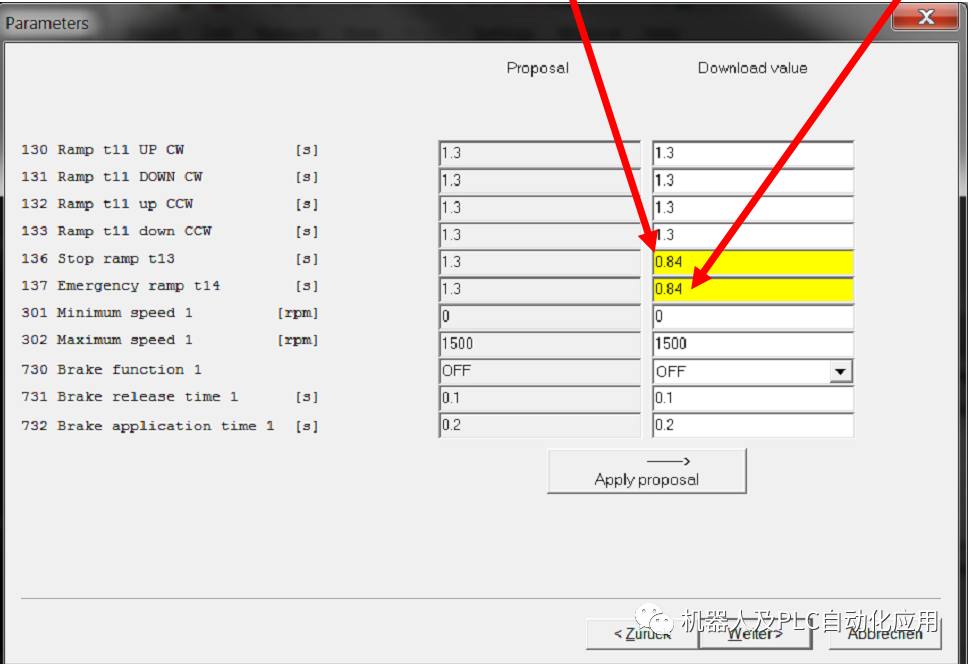
注:P136-和P137值必须分别等于或小于P130-133斜坡的值。稍后在AMA0801启动时输入斜坡开关。
PLC的“控制器禁止”只能在PLC K100时间(t1)结束后发生(即使在故障期间)。
电机启动现已完成。
审核编辑:刘清
-
RT-Thread自动初始化详解2022-06-25 13618
-
RT-Robot框架的初始化智能车流程使用示例2022-08-08 1505
-
手机模块初始化向导2009-09-18 911
-
RDA1846S初始化设置2016-01-15 2376
-
UCOS_III_配置与初始化2016-12-20 1091
-
HX711初始化程序2017-02-08 2096
-
FANUC电机参数初始化方法2017-10-09 12961
-
ds1302时钟芯片初始化,自动决定DS1302是否需要初始化程序2017-10-19 11239
-
8253初始化程序分享_8253应用案例2018-05-23 23510
-
在51平台下初始化文件的引入导致全局变量无法初始化的问题如何解决2019-08-20 1541
-
霍尔无刷电机如何进行程序初始化?2019-10-15 9039
-
C++之初始化列表学习的总结2020-12-24 1909
-
RT-Thread自动初始化机制2022-06-17 5067
-
GraniStudio:初始化例程2025-08-22 1259
-
EtherCAT总线初始化步骤2025-12-22 1436
全部0条评论

快来发表一下你的评论吧 !
