

基于FPGA图像处理的高斯模糊实现
可编程逻辑
1398人已加入
描述
高斯模糊(Gaussian Blur)是一种高斯低通滤波,可以过滤掉图像的高频部分,保留低频部分,对于去除高斯噪声非常有效果,常常被用于图像去噪中。
在做图像模糊的时候最直接的想法就是在当前像素上取一个3*3或者5*5的窗口,把窗口里面的数字相加再求一个平均,得到的均值作为新的当前像素的值,这也就是均值滤波。
高斯滤波认为窗口中的每个像素对当前像素的影响是不一样的,和当前像素越接近影响就越大。因此加权平均更加合理,相近的像素值权重就比较大,相远的权重就小。
在利用高斯滤波的时候首先需要去生成一个高斯核,二维高斯函数如下:
在计算每个像素值时,可以将其视为坐标的原点,这样可以将视为0,就可以简化二维高斯函数如下:
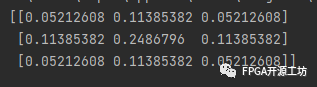
可以使用如下python代码来生成一个高斯核:
import cv2 as cv
import numpy as np
sigma = 0.8
kernel = np.zeros((3, 3))
for i in range(-1, 2):
for j in range(-1, 2):
kernel[i + 1][j + 1] = 1.0 / (2 * np.pi * sigma * sigma) * np.exp(-((i * i + j * j) / (2.0 * sigma * sigma)))
print(kernel)
在OpenCV中也提供了getGaussianKernel这个函数来获取一个高斯核,他的函数定义如下:
def getGaussianKernel(ksize, sigma, ktype=None)
第一个参数ksize代表高斯核的尺寸,这里会生成一个ksize*1的高斯核。
对于二维的高斯核生成方式如下:
import cv2 as cv import numpy as np sigma = 0.8 opencv_gaussian_kernel_x = cv.getGaussianKernel(3, 0.8) opencv_gaussian_kernel_y = cv.getGaussianKernel(3, 0.8) opencv_gaussian_kernel = opencv_gaussian_kernel_x * opencv_gaussian_kernel_y.T print(opencv_gaussian_kernel)
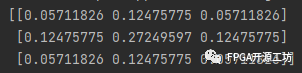
可以看到两者是不一样的,那是因为我们没有对我们自己写的求出来的高斯模板进行归一化。
然后对其进行归一化,使其权重相加的和为1
kernel = kernel / kernel.sum() print(kernel)
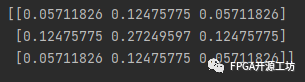
可见归一化后的结果就和OpenCV提供的函数计算出来的结果就一样了。
最后对齐转换为整数,左上角的数据变为1
kernel = np.int32(kernel / kernel[0][0])
print(kernel)
print("1/" + str(kernel.sum()))
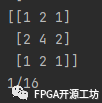
这样就可以得到完整的高斯模板了。
完整的python代码如下:
import cv2 as cv
import numpy as np
sigma = 0.8
opencv_gaussian_kernel_x = cv.getGaussianKernel(3, 0.8)
opencv_gaussian_kernel_y = cv.getGaussianKernel(3, 0.8)
opencv_gaussian_kernel = opencv_gaussian_kernel_x * opencv_gaussian_kernel_y.T
print(opencv_gaussian_kernel)
kernel = np.zeros((3, 3))
for i in range(-1, 2):
for j in range(-1, 2):
kernel[i + 1][j + 1] = 1.0 / (2 * np.pi * sigma * sigma) * np.exp(-((i * i + j * j) / (2.0 * sigma * sigma)))
print(kernel)
kernel = kernel / kernel.sum()
print(kernel)
kernel = np.int32(kernel / kernel[0][0])
print(kernel)
print("1/" + str(kernel.sum()))
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
图像高斯滤波的原理及FPGA实现思路2024-12-07 3363
-
高斯卷积核函数在图像采样中的意义2024-09-29 1696
-
为什么高斯滤波广泛的应用在图像处理中?2023-10-09 741
-
FPGA设计中 Verilog HDL实现基本的图像滤波处理仿真2021-07-13 3919
-
如何使用FPGA实现顺序形态图像处理器的硬件实现2021-04-01 1289
-
【FPGA学习案例分享】基于FPGA的图像边缘检测例程2019-11-29 2922
-
基于FPGA的图像平滑处理2019-07-05 2340
-
基于FPGA灰度图像高斯滤波算法的实现2018-02-20 8206
-
基于梯度方向直方图与高斯金字塔的车牌模糊汉字识别方法2017-12-25 1916
-
模糊图像处理解决方案2014-06-11 21048
-
LOG算子在FPGA中的实现2011-05-16 1386
-
基于FPGA的模糊CMAC网络的硬件实现2010-08-09 821
-
基于DSP和FPGA的通用图像处理平台设计2010-02-01 1834
-
FPGA图像与视频处理培训2009-07-16 6056
全部0条评论

快来发表一下你的评论吧 !
