

选择电机的基本原则 电机容量的计算步骤
电子说
描述
来源:小牛机器人
电机在其固有频率下运行会产生振荡。当然,其固有频率会远远高于最大频率,但是在安装了机械设备后,整个系统的固有频率就会发生改变,很有可能会出现在电机最大转速范围内,因此很可能会使系统不稳定。另外,电机应该尽量安装在坚硬的平台上,否则额外的弹性可能会给电机带来振颤。在装配过程中需要注意以下条件:
①机械传动成分(齿轮箱、联轴器、传送带等);
②安装平台的硬度;
③电机根部与法兰安装的硬度;
④电机本身重量;
⑤负载量与电机转动惯量比;
⑥电机与机械系统的阻尼特性;
⑦安装类型与位置(IM B14、IM V18/19、IM B35);
⑧电机的重量分布,如轴高、轴长等。
选择电机的基本原则
选择电机时,有以下几条基本原则。
(1)当量匹配
系统要求精度由单位定位长度反馈回的脉冲数以及驱动器的倍频能力决定,即以下公式成立: 单位长度/(单位长度对应脉冲数×驱动器倍频数)<系统要求精度
(2)惯量匹配
由于负载的惯量与减速比都会影响整个系统的动态响应特性,为此,选择合适的减速比是优化系统的关键。在选择减速箱时,既要考虑到力矩的因素,也要考虑到惯量的匹配,通常认为最佳的惯量比(折合到电机轴上的负载惯量/电机惯量)为1。当惯量比小于4时,可以得到高性能的动态响应。电机与负载的连接通常有轴连接器、齿轮箱、链条皮带等方式,这种连接结构构成一个二自由度系统,大惯量比会给系统带来谐振。负载惯量与电机惯量比的影响如下图所示。
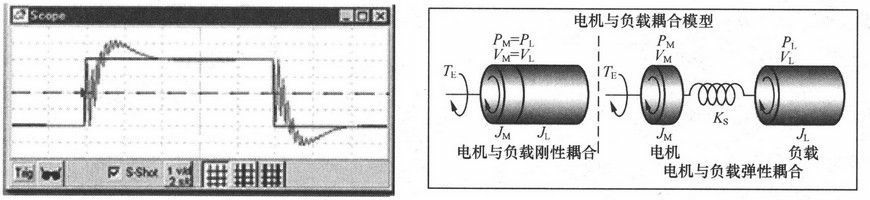
负载惯量与电机惯量比的影响
避免惯性失配的方法之一是在允许的范围内提高齿轮比或滚珠间距,这样做能够减轻负载惯性对电机的影响。选择电机的同时也要考虑选择适当的齿轮比和滚珠间距,当然也不能忘记考虑电机的大小 。
(3)力矩匹配
峰值力矩:由负载与电机的转动惯量之和以及最大加速度决定。额定力矩:由负载与电机的转动惯量之和以及应用中的速度曲线决定。频繁启动的伺服设备则需要更大输出能力的电机。
(4)速度匹配
额定转速:根据系统的机械结构以及速度的需求来确定。最大转速:要充分考虑到电机最大转速与输出扭矩的关系,同时要保证最大转速远离系统谐振点。
电机容量的计算步骤
电机容量的计算步骤如下。
①确定系统的控制要求:位置控制或速度控制。
②确定系统的技术要求:最大转速、速度位置曲线。
③确定电机机械传动结构与减速比。
④根据以下数据计算机械参数,包括负载惯量、负载平均力矩、峰值力矩,然后将所有力矩折合到电机侧。电机的速度—扭矩曲线如下图所示。
负载质量。
驱动辊的直径。
摩擦力。
机械效率。
传输路径。
最大速度。
最大加速度与最大减速度。
运行停止周期。
⑤根据以上数据计算电机的特征参数,选定电机并根据4个原则进行检验。
⑥验证温升,确定其冷却方式。
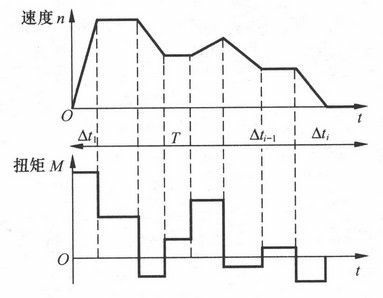
电机的速度—扭矩曲线
审核编辑:汤梓红
-
MOS设计选型的基本原则2021-03-18 1514
-
电机转动的基本原理是什么?2021-07-21 2371
-
数字地和模拟地处理的基本原则2021-08-06 2474
-
电源IC的选择基本原则2021-11-17 1842
-
内电层分割基本原则2015-12-24 1169
-
PCB设计基本原则2016-01-18 654
-
选用微型减速电机的基本原则。顺力电机2018-12-29 731
-
选择GPU服务器的基本原则有哪些2020-02-24 3559
-
PLC选型的基本原则有哪些2020-04-25 18351
-
PLC控制系统设计的基本原则2020-05-18 4218
-
硬件原理图设计基本原则2022-06-14 5589
-
电机保护器的选型基本原则和方法2023-03-31 5121
-
手机故障维修基本原则及方法2023-10-24 854
-
群脉冲预防方案的基本原则?2024-01-15 1464
-
选择IGBT的基本原则是什么2024-03-12 2262
全部0条评论

快来发表一下你的评论吧 !
